О
3 3
Изобретение относится к средствам метрологической аттестации датчиков линейных перемещений и может быть использовано для градуировки датчиков линейного перемещения с диапазоном перемещения от 0 до 25 мм.
Цель изобретения - повышение производительности установки за счет увеличения диапазона регулирования скоростей перемещения каретки.
На чертеже представлена структурная схема установки.
Установка для градуировки датчиков линейного перемещения содержит станину с направляющими, установленную на направляющих с возможностью продольного перемещения каретку 1 с ходовым винтом 2, датчик 3 перемещения каретки 1 относительно станины, установленные на станине электродвигатель 4 перемещения каретки 1 с электроуправляемой муфтой 5 и датчиком 6 скорости вращения электродвигателя 4 и механизм 7 ручного привода каретки 1 с электроуправляемой муфтой 8, соединенные с ходовым винтом 2 через муфты 5 и 8, блок 9 управления, входы которого соединены с датчиками 3 и 6 перемещения каретки 1 и скорости вращения электродвигателя 4, а выход - с обмотками электродвигателя 4, двухканальный регистратор 10, один вход которого соединен с датчиком 3 перемещения каретки 1, а другой предназначен для соединения с выходом градуируемого датчика линейного перемещения, преобразователь 11 напряжения на выходе датчика б скорости вращения электродвигателя 4 в частоту, вход которого соединен с выходом датчика 6, и инвертор 12, вход которого соединен с выходом преобразователя 11 напряжения в частоту.
Электроуправляемые муфты 5 и 8 электродвигателя 4 и механизма 7 ручного привода выполнены, например, в виде порошковых электромагнитных муфт, а их входы соединены соответственно с выходами преобразователя 11 напряжения в частоту и инвертора 12, Градуируемый датчик 13 линейного перемещения соединен своим входным подвижным элементом с кареткой 1, а выходом - с вторым выходом двухка- нального регистратора 10.
Установка для градуировки датчиков линейного перемещения работает следующим образом.
Градуируемый датчик 13 закрепляют на станине, а его входной подвижный элемент соединяют с кареткой 1. По хранящейся в блоке 9 управления программе вырабатывают сигнал управления для перемещения каретки 1 в первую из заданных по программе
точек. При этом в зависимости от разности между текущей координатой положения каретки 1, измеряемой датчиком 3 перемещения каретки 1, и хранящейся в памяти блока
9 управления координатой заданной точки формируется выходной сигнал управления электродвигателем 4, корректируемый с учетом скорости вращения электродвигателя 4, измеряемой датчиком 6 скорости его
0 вращения.
Одновременно выходной сигнал датчика 6 скорости вращения электродвигателя 4 преобразуется преобразователем 11 напряжения в частоту следования импульсов
5 постоянной длительности. Частота и длительность импульсов выбраны таким образом, чтобы при максимальной скорости вращения электродвигателя 4 длительность импульса была чуть меньше периода следо0 вания импульсов, а при минимальной скорости этот период увеличивался на два десятичных порядка. Поэтому при максимальной скорости вращения муфта 5 электродвигателя почти не выключается и
5 работает практически без проскальзывания, а муфта 8 механизма 7 ручного привода не оказывает влияния на перемещение каретки, так как она включается на весьма короткое гремя. По мере приближения ка0 ретки 1 к заданной точке скорость вращения электродвигателя 4 снижается, частота следования импульсов на выходе преобразователя 11 напряжения в частоту уменьшается, а паузы между включениями муфты 5 элект5 родвигателя 4 возрастают, вследствие чего эта муфта работает все с большим проскальзыванием.
С другой стороны, длительность включения муфты 8 механизма 7 ручного привода
0 возрастает, что приводит к дополнительному торможению каретки 1 и снижению ее скорости за счет расходования части накопленной кинетической энергии перемещения каретки 1 на вращение механизма 7 ручного
5 привода с потерями на трение и разгон инерционных масс его движущихся элементов. Вследствие этого диапазон регулирования скоростей перемещения каретки может быть увеличен как в сторону больших на0 чальных скоростей, так и в сторону меньших конечных скоростей в конце цикла позиционирования каретки 1. При этом общее время позиционирования сокращается, что приводит к повышению производительно5 сти установки при сохранении требуемой точности позиционирования.
Описанный процесс повторяется для всех последующих точек траектории перемещения каретки 1 при градуировке датчика 13 линейного перемещения.
Использование описанной установки позволяет ускорить процесс позиционирования каретки 1 при сохранении гибкости программы градуировки и требуемой точности позиционирования.
Формула изобретения Установка для градуировки датчиков линейного перемещения, содержащая станину с направляющими, установленную на направляющих каретку с ходовым винтом, датчик перемещения каретки относительно станины, установленные на станине электродвигатель перемещения каретки с муфтой и датчиком скорое i и вращения элек- тродвигателя и механизм р/чного привода каретки с муфтой, соединенные с ходовым винтом через муфты, блок управления, входы которого соединены с датчиками перемещения каретки и скорости вращения
электродвигателя, а выход - с обмотками электродвигателя, и двухканальный регистратор, один вход которого соединен с выходом датчика перемещения каретки, а другой предназначен для соединения с выходом градуируемого датчика линейных перемещений, отличающаяся тем, что, с целью повышения производительности установки за счет увеличения диапазона регулирования скоростей перемещения каретки, она снабжена преобразователем напряжения в частоту, соединенным с выходом датчика скорости вращения электродвигателя, и инвертором, соединенным с выходом преобразователя напряжения в частоту, а муфты электродвигателя и механизма ручного привода выполнены электроуправляемыми и соединены своими управляющими входами соответственно с выходами преобразователя напряжения в частоту и инвертора.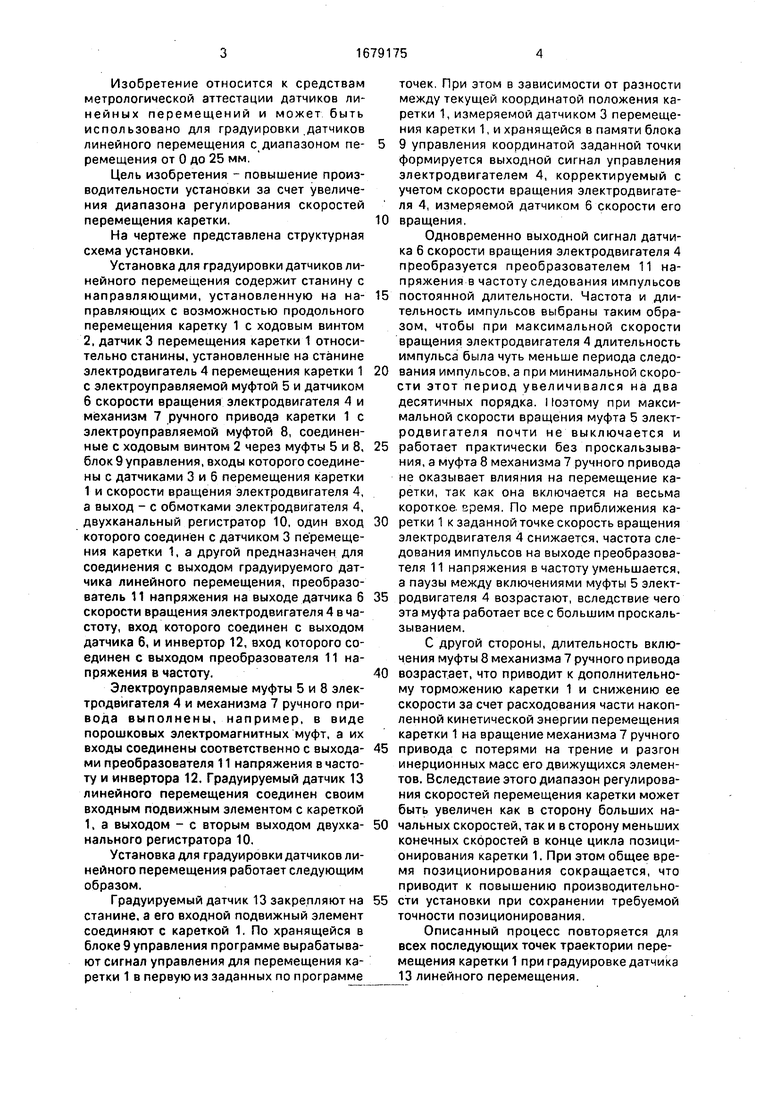

| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для градуировки шкал генераторов сигналов | 1982 |
|
SU1080016A1 |
| Система управления транспортным средством | 1987 |
|
SU1550480A1 |
| Электромеханический привод поступательного действия | 2022 |
|
RU2786248C1 |
| УСТРОЙСТВО ДЛЯ АВТОМАТИЧЕСКОГО РЕГУЛИРОВАНИЯ ПОЛОЖЕНИЯ ОБЪЕКТА ПО ДВУМ ВЗАИМНО ПЕРПЕНДИКУЛЯРНЫМ НАПРАВЛЕНИЯМ | 2014 |
|
RU2579781C2 |
| Фрезерный станок | 1984 |
|
SU1225707A1 |
| Электропривод перемещения механизма подачи станка | 1982 |
|
SU1115191A1 |
| Мобильный расточной станок | 2020 |
|
RU2753848C1 |
| СПОСОБ И СИСТЕМА РЕГУЛИРОВАНИЯ РЕЖИМОВ РАБОТЫ ДВУХТОПЛИВНОГО ДВС | 2017 |
|
RU2689658C1 |
| Устройство для обучения работе на металлорежущих станках | 1982 |
|
SU1051558A1 |
| ПРОМЫШЛЕННЫЙ ТРАКТОРНЫЙ АГРЕГАТ С ЭЛЕКТРОМЕХАНИЧЕСКОЙ ТРАНСМИССИЕЙ | 2014 |
|
RU2550867C1 |
Изобретение относится к средствам метрологической аттестации датчиков линейных перемещений и может быть использовано для градуировки датчиков линейного перемещения с диапазоном перемещения от 0 до 25 мм. Цель изобретения - повышение производительности установки за счет увеличения диапазона регулирования скоростей перемещения ка- ретки.При перемещении каретки 1, соединенной с подвижным элементом градуируемого датчика 13 линейного перемещения, а заданное положение, контролируемое по показаниям датчика 3 перемещения каретки, попеременно включаются муфты 5 и 8 электродвигателя 4 и механизма 7 ручного привода, причем частота включений муфты 5 электродвигателя уменьшается пропорционально уменьшению числа оборотов вала электродвигателя 4, а длительность включения сохраняется постоянной, что обеспечивает плавное регулирование более низких скоростей перемещения каретки 1, Включение муфты 8 механизма 7 ручного привода в паузах между включениями муфты 5 электродвигателя 4 приводит к дополнительному торможению каретки 1 за счет расходования части накопленной кинетической энергии каретки 1 на вращение механизма 7 ручного привода и разгон инерционных масс его движущихся элементов. Установка позволяет ускорить процесс позиционирования каретки при сохранении требуемой точности позиционирования. 1 ил.
| Цейтлин Я.М., Бржезинский В.М., Гопп Н.Э | |||
| и Сошников В.А | |||
| Автоматизированная установка для контроля точности широкопредельных преобразователей перемеще- ний | |||
| Колосниковая решетка с чередующимися неподвижными и движущимися возвратно-поступательно колосниками | 1917 |
|
SU1984A1 |
| Приспособление для точного наложения листов бумаги при снятии оттисков | 1922 |
|
SU6A1 |
| рис | |||
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
