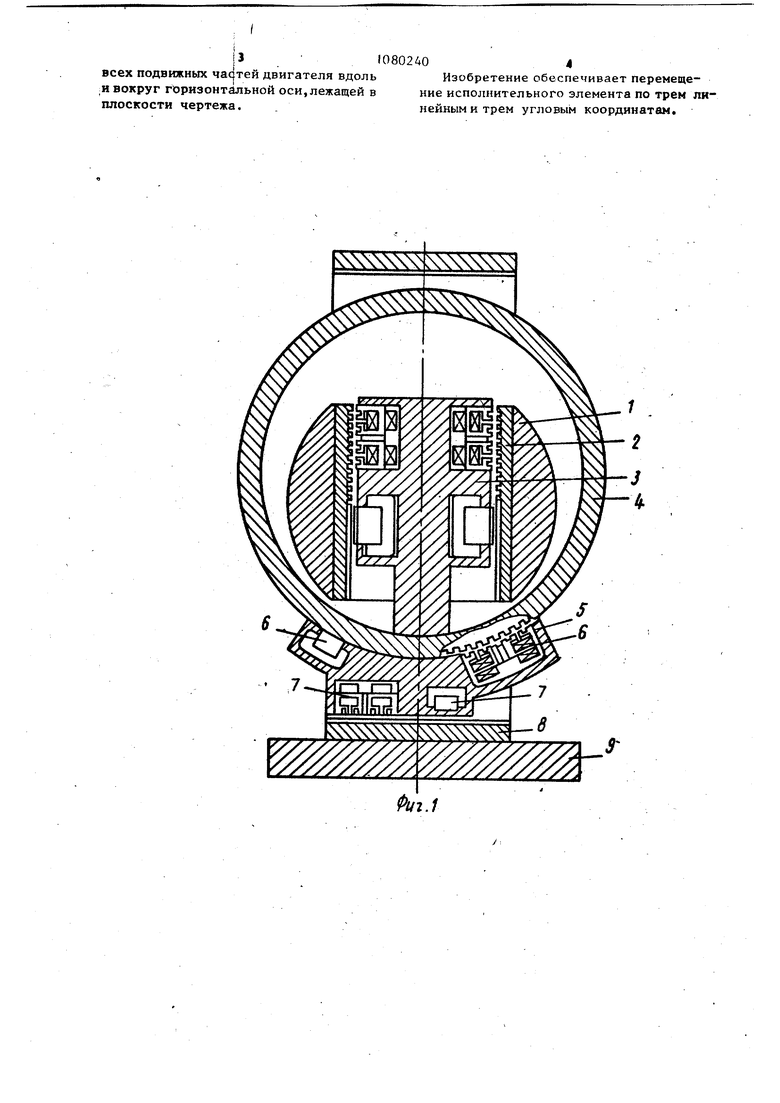
Изобретение относится к гэлектрическим машинам, а именно к шаговым элек родвигателям, и может быть использовано в позиционных устройствах для перемещения подвижного элемента в ограниченном,пространстве по трем линейным и трем угловым координатам. Известны ьшогокоординатные шаговые электродвигатели с безобмоточным зубчатым индуктором и якорем с зубцами на рабочих поверхностях полюсов охваченных фазными катутками. Один из таких двигателей содержит сферический безобмоточнын зубчатый индуктор и якорь, состоящий из четырех незавйси№.1х частей, поворотно закрепленных на неподвижном основании l . Двигатель имеет ограниченный угол поворота индуктора вокруг двух координатных осей. Наиболее близким к изобретению по технической сущности является многокоординатный шаговый электродвигатель с перемещением подвижного органа по трем линейным и одной угловой координате, содержа1 01й безоб моточный зубчатый индуктор с двух- координатными зубцовыми зонами и якорь с зубчатыми полюсами, охваченными. обмотками управления и примыкающими к зубцовым зонам индуктора 2. Недостатком известного двигателя является ограниченность угловых пере мещений двигателя. Цель изобретения - расширение фун циональных возможностей двигателя пу тем реализации перемещений по двум дополнительным угловым координатам. Пня достижения цели в многокоординатном шаговом электродвигателе, содержащем безобмоточр Ый зубчатый ин дуктор с двухкоординатными зубцовыми зонами и якорь с зубчатыми полюсами, охваченными обмотками управления и примыкающими к зубцовым зонам индуктора, индуктор двигателя состоит из трех частей цилиндрической формы, ра положенных одна внутри другой таким образом, что центральные оси симметрии внешней и средней, а также средней и внутренней частей перпе1одикуля ны, а якорь двигателя состоит из дву частей, при этом одна из частей.якор неподвижно закреплена на средней час ти индуктора. Кроме того, для увеличения длины да однойиз линейных координат внегоняя часть индуктора может быть выполнена дуговой. Кроме того,-с той же целью внеганяя и внутренняя части индуктора могут бить выполнены дуговыми .I На фиг.1 и 2 показаны варианты предлагаемого двигателя. Двигатель содержит исполнительный элемент 1, расположенный вокруг цилиндрической части индуктора 2, имеющей на внутренней поверхности две взаимно перпендикулярные зубцовыв зоны. Внутри индуктора находится часть якоря 3 с двумя группами магнитных полюсов, охваченных обмотками управления. Полюса снабжены зубцами, параллельными.зубцам соответствующих зубцовых зон индуктора. Якорь прикреплен к внутренней поверхности второй цилиндр1ической части индуктора 4, на внешней поверхности которого имеются две взаимно перпендикулярные зубцовые зоны. Вторая часть якоря 5 с группами полюсов 6 примыкает ко второй цилиндрической части индуктора. На противоположной стороне данной части .якоря расположены группы полюсов 7, прнмыкакхцие к третьей (внешней) части индуктора 8 с двумя перпендикулярными зубцовыми зонами на внутренней поверхности. Эта часть индуктора неподвижно укреплена на основании 9. Двигатель работает следующим образом. Р1сполните.льный элемент 1 вместе с внутренней частью индуктора 2 осуществляет линейное перемещение вдоль вертикальной оси и поворот относительной той же оси при подаче сигнала управления на обмотки полюсов части якоря 3. Влияние трения между взаимно перемещающимися частями может быть устранено применением опор любого известного типа, качения, аэростатических и др. Средняя часть индуктора 4 и вместе с ним находящийся внутри него исполнительный элемент перемещается линейно вдоль и поворачивается вокруг горизонтальной оси, перпендикулярной плоскости чертежа при взаимодействии с зубчатыми полюсами части якоря 5, а именно при подаче сигнала управления на обмотки групп полюсов 6. Сигнал управления,поданный на обмотки групп полюсов 7|3а счет взаимодействия последних с зубцовыми зонами внешней части индуктора 8 вызывает перемещение
|3 10802404
всех подвижных частей двигателя вдоль Изобретение обеспечивает перемеще.и вокруг горизонтальной оси, лежащей в плоскости чертежа.
ние исполнительного элемента по трем линейным и трем угловым координатам.
| название | год | авторы | номер документа |
|---|---|---|---|
| Линейный шаговый электродвигатель | 1978 |
|
SU752656A1 |
| Двухкоординатный шаговый электродвигатель | 1977 |
|
SU657539A1 |
| Линейный шаговый электродвигатель | 1972 |
|
SU504278A1 |
| Многокоординатный шаговый электродвигатель | 1983 |
|
SU1119131A1 |
| Линейный шаговый электродвигатель | 1981 |
|
SU1001348A1 |
| Двухкоординатный шаговый электродвигатель | 1975 |
|
SU577616A1 |
| Линейный шаговый электродвигатель | 1973 |
|
SU476641A1 |
| Многофазный линейный шаговый двигатель | 1981 |
|
SU1001349A1 |
| Линейный шаговый электродвигатель | 1984 |
|
SU1365279A1 |
| Линейный шаговый электродвигатель | 1981 |
|
SU989699A1 |

1. МНОГОКООРДИНАТННЙ ШАГОВЫЙ ЭЛЕКТРОДШГАТБЛЬ с перемещением под-^ вижного органа по трем линейным и одной угловой координате,содержащий безобмоточный зубчатый индуктор с двухкоординатными 'зубцовыми зонами и якорь с зубчатым|с полюсами,охваченными обмотками управления и примыка- ицими к зубцовым зонам ^индуктора, отличающийся тем, что, сцелью расширения функциональных воз- • можностей двигателя путем реализации перемещения подвижного органа по двум дополнительным угло№1м координатам,индуктор двигателя состоит из трех частей цилиндрической формы, расположенных одна внутри другой таким образом, что центральные оси симметрии внешней и сред'ней, а также средней и внутренней частей перпендакулярны,а якорь двигателя состоит из двух частей, при этом одна из частей якоря неподвижно закреплена на средней части индуктора.2^ Электродвигатель по п. 1, о т- ji и чающийся тем,что,с целью увеличения длины хода по -.одной из ли- ней1шх координат, внешняя часть индуктора выполнена дуговой.3.Электродвигатель по пп. 1,2,о т- л и ч а ю щ и и с я тем,что,с целью увеличения длины хода двигателя по од-, ной из линейных координат,средняя : часть индуктора выполнена дуговой.(Л§30оND (lib
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Двухкоординатный шаговый электродвигатель | 1977 |
|
SU657539A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Линейный шаговый электродвигатель | 1978 |
|
SU752656A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
