Изобретение относится к электротехнике, а именно к шаговым электродвигателям с плоским рабочим зазором, и может быть использовано для перемещения подвижного элемента в плоскости с поворотом вокруг оси, перпендикулярной плоскости перемещения. Наиболее близким по технической сущности к предлагаемому является многокоординатный шаговый электродвигатель, содержащий неподвижный плоский зубчатый индуктор и подвижные якори с зубчатыми магнитопроводами и фазными обмотками управления, укрепленные в общем корпусе с возможностью поворота вокруг оси, перпендикулярной плоскости индуктора 1. Недостатком данного электродвигателя является сложность конструкции, так как для обеспечения вращения двигателя на угол больший 360°, он должен включать не менее четырех отдельных якорей, объединенных общим корпусом, и сложность алгоритма управления перемещением якорей, законы управления каждого из которых различны из-за несовпадения точек приложения усилий разных якорей. Цель изобретения - упрощение конструкции многокоординатного шагового электродвигателя. Цель достигается тем, что в многокоординатном шаговом электродвигателе, содержащем неподвижный плоский зубчатый индуктор и подвижные якори с зубчатыми магнитопроводами и фазными обмотками управления, укрепленные в общем корпусе t возможностью поворота вокруг оси перпендикулярной плоскости индуктора, якори снабжены двумя группами магнитопроводов, симметрично расположенных относительно осей вращения якорей, причем направления нарезки зубцов групп магнитопроводов взаимно перпендикулярны. На чертеже схематически представлен предлагаемый электродвигатель. Двигатель содержит магнитомягкий безобмоточный плоский индуктор 1 с двумя системами взаимно перпендикулярных прорезей на поверхности, образующих систему кубических зубцов. Подвижная часть двигателя расположена на поверхности индуктора на аэростатической опоре, состоящей из общего корпуса 2 и двух якорей 3 и 4. Якори содержат группы магнитопроводов с обмотками управления (на чертеже показаны только активные поверхности магнитопроводов с зубцовой нарезкой) и укреплены с возможностью вращения относительно общего корпуса вокруг осей Oi и Ог ,перпендикулярных плоскости индуктора. Каждый якорь имеет две группы магнитопроводов, симметрично расположенных относительно осей вращения каждого якоря О, и Oj. Зубцы групп магнитопроводов перпендикулярны и ориентированы вдоль соответствующих систем прорезей индуктора. Двигатель работает следующим образом. Цодача переменного напряжения заданной частоты на обмотки управления магнитопроводами якорей вызывает перемещение каждого якоря в направлении, перпендикулярном направлению нарезки зубцов магнитопроводов якоря, со скоростью, пропорциональной частоте переменного напряжения (частоте коммутации обмоток). Максимальное усилие, которое развивает якорь при перемещении, пропорционально амплитуде токов обмоток якоря. Симметричные относительно центров вращения якорей зубцовые зоны магнитопроводов, имеющих .одинаковое направленную ориентацию зубцов, коммутируют токами одинаковой амплитуды и частоты таким образом, что усилия, развиваемые этими зубцовыми зонами, всегда одинаковы: Fx. F;,, F;c, Rc Fx72, Fv, I,, Fv/2, F.,, Fy, F//2. Выполнение условия (1) обеспечивает отсутствие разворачивающих моментов, действующих на якори двигателя при несимметричном относительно центров якорей О, и О приложении усилия. Коммутация обмоток обоих якорей двигателя с одинаковой амплитудой и частотой токов вызывает плоскопараллельное перемещение общего корпуса якорей. При этом выполняются условия; I F4 Fy Результирующие усилия якорей, равные векторным суммам F,{ Ч- FA и F/ -ь , одинаковы по величине и направлению. Движение корпуса якорей по любой траектории с изменением углового положения G реэлиз.у«тся при коммутации обмоток управления каждого якоря с разной частотой и ампшятудой токов. При этом закон изменения частоты коммутации каждого якоря должен соответствовать траекториям движения якорей. Для перемещения с одинаковым усилием требуется аналогичное соответствие для амплитуды токов обмоток управления. Например для кругового вращения корпуса якоря с неизменным моментом требуется изменение частоты и амплитуды токов коммутации обмоток управления якорей по синусоидальному закону. При этом законы изменения усилий якорей в зависимости от углового положения корпуса якорей 0 должны быть следующие: р р -С- sin0 / ... Ч -Ft (3) Предлагаемый электродвигатель обеспечивает перемещение подвижных частей по любой траектории с неограниченным углом поворота вокруг своей оси при минимальi oM числе взаимно вращающихся частей.
| название | год | авторы | номер документа |
|---|---|---|---|
| Двухкоординатный шаговый электродвигатель | 1977 |
|
SU657539A1 |
| Линейный шаговый электродвигатель | 1981 |
|
SU1001348A1 |
| Многокоординатный шаговый электродвигатель | 1982 |
|
SU1080240A1 |
| Линейный шаговый электродвигатель | 1972 |
|
SU504278A1 |
| ЛИНЕЙНЫЙ ШАГОВЫЙ ЭЛЕКТРОДВИГАТЕЛЬ | 1989 |
|
RU2030080C1 |
| ЛИНЕЙНЫЙ ШАГОВЫЙ ЭЛЕКТРОДВИГАТЕЛЬ | 1990 |
|
RU2030079C1 |
| Двухкоординатный шаговый электродвигатель | 1975 |
|
SU577616A1 |
| Линейный шаговый электродвигатель | 1987 |
|
SU1457105A1 |
| Линейный шаговый электродвигатель | 1973 |
|
SU476640A1 |
| Линейный шаговый электродвигатель | 1973 |
|
SU476641A1 |
МНОГОКООРДИНАТНЫЙ ШАГОВЫЙ ЭЛЕКТРОДВИГАТЕЛЬ, содержащий неподвижный плоский зубчатый индуктор и подвижные якори с зубчатыми магнитоцроводами и фазными обмотками управления, укрепленные в общем корпусе с возможностью поворота вокруг оси, перпендикулярной плоскости индуктора, отличающийся тем, что, с целью упрощения конструкции, якори снабжены двумя группами магнитопроводов, симметрично расположенных относительно осей вращения якорей, причем направления нарезки зубцов групп магнитопроводов взаимно перпендикулярны. СО со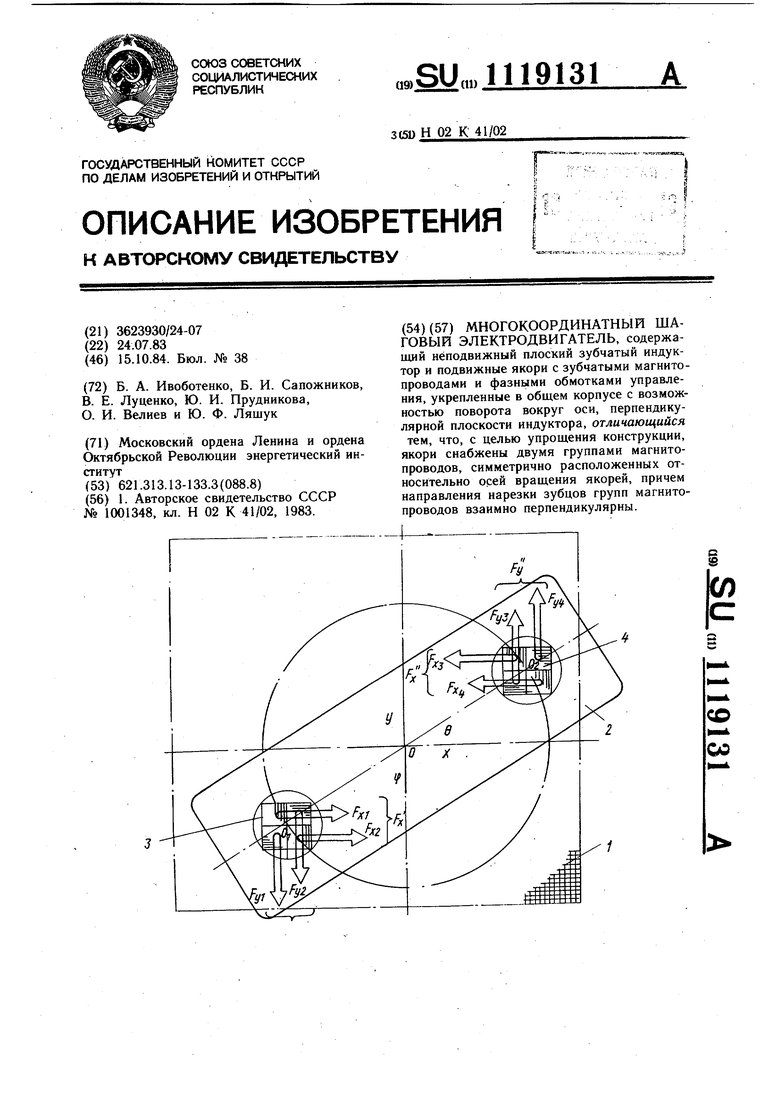
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Линейный шаговый электродвигатель | 1981 |
|
SU1001348A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
