Изобретение относится к подъемно транспортной технике, вчастности к грейферным механизмам. Известен механизм упрвления челю тями грейфера, содержащий замыкающи полиспасты, подвижные блоки каждого из которых расположены на траверсе, а неподвижные уравнительные блоки на одной оси, размещенной на головк и балансир, расположенный на одной оси с неподвижными уравнительными б ками l . Однако известный механизм управления челюстями грейфера не обеспечивает достаточных усилий при отрыве груза. Целью изобретения является увели чение грузоподъемности. Цель достигается тем, что механи управления челюстями грейфера, соде жащий замыкающие полиспасты, подвиж ные блоки каждого кэ которых расположены на траверсе, а неподвижные уравнительные блоки - на одной оси, размещенной на головке, и балансир, расположенный на одной оси с неподвижными уравнительными блоками, сна жен соединенным с основньгм балансиром поддерживающими канатами дополнительнььм балансиром с элементом дл соединения с грузоподъемньм механиз мом и второй траверсой с элементом для соединения с грузоподъемным меxaнизмo ;, пр;-; этом каходый полиспаст снабжен закрепленными шарнирно на второй траверсе подвижны-ми уравните ными блоками, в которых запасован замыкающий канат, концы которого закреплены на oci-j непод:(вижных уравнительных блоков. На фиг, 1 дан предлагаемый механизм, общая Сл:ема; на фиг. 2 - пример использования предлагаемого меxaHiisMa в грейфере, вид спереди, на фиг. 3 - го же,, вид сбоку. Механизм управления челюстями используется в грейфере, в котором мелюсти 1 шарнирно соединены при помощи двух соосных осей 2. На этих же осях расположены подвижные блоки 3. Челюсти посредством тяг 4 связаны с осью 5, на которой расположены неподвижные уравнительные блоки 6, закреплены замыкающих канатон 7 и расположен нижний балансир В. крепления поддерживающих канатов грейфера. Ходовые концы замыкающих канатов 7 выведены на подвижные уравнительные блоки 9 и соединены посредством вилок 10 и траверсы 11 с гаком замыкающей лебедки. Вилсний балансир 8 посредством поддерживаюЕШХ канатов 12 связан с верхним балансиром 13, крепящимся к гаку поддерживающей лебедки. Соединение грейфера с гаками осуществляется посредством пальцев 14 и 15, вставляемых в отверстия в нижней части гаков. Для исключения перегибов поддерживающих канатов 12 при их ослаблении в листах соединения их с балансирами 8 и 13 установлены вилки 16 и 17. Для исключения повреждения замыкающих канатов 7 при их ослаблении предусмотрены клюзы 18, охватывающие канаты 7 в районе блоков б. При этом неподвил(ные уравнительные блоки б выполнены меньшего диаметра, че2М блоки 3 и-9, так что блоки 6 находятся внутри полиспаста, оборудованного канатами 7. Блоки 3,4 и 9 защищены соответственно кожухами 19, 20 и 21 от спадания канатов. Механизм управления челюстями грейфера работает следующим образом. Процесс открывания челюстей грейфера. Гак 22 поддерл(ивающей лебедки стоит на месте,гак 23 замыкающей лебедки опускается, опуская траверсу 11 с блоками 9. Поскольку исчезает усилие замыкания грейфера, развиваемое полиспастом в нем подвижными и неподвижными блоками 3 и б, то блоки под действием собственного веса опускаются, поворачивая и раскрывая челюсти 1. Процесс закрытия челюстей грейфера. Гак 22 подлерлсивающей лебедки стоит на месте, гак 23 замыкающей лебедки поднимается, поднимая траверсу 11 с блоками 9. Связанные с ними замыкающие канаты 12 развивают усилие в полиспасте грейфера мехцду блоками 3 и б. При этом блоки 3 поднимаются, поворачивая и закрывая челюсти. Предлагаемая конструкция позволят создать мощный грейфер ,допускающий авеску его на два гака плавкрана .
1 i1J
}0,3.J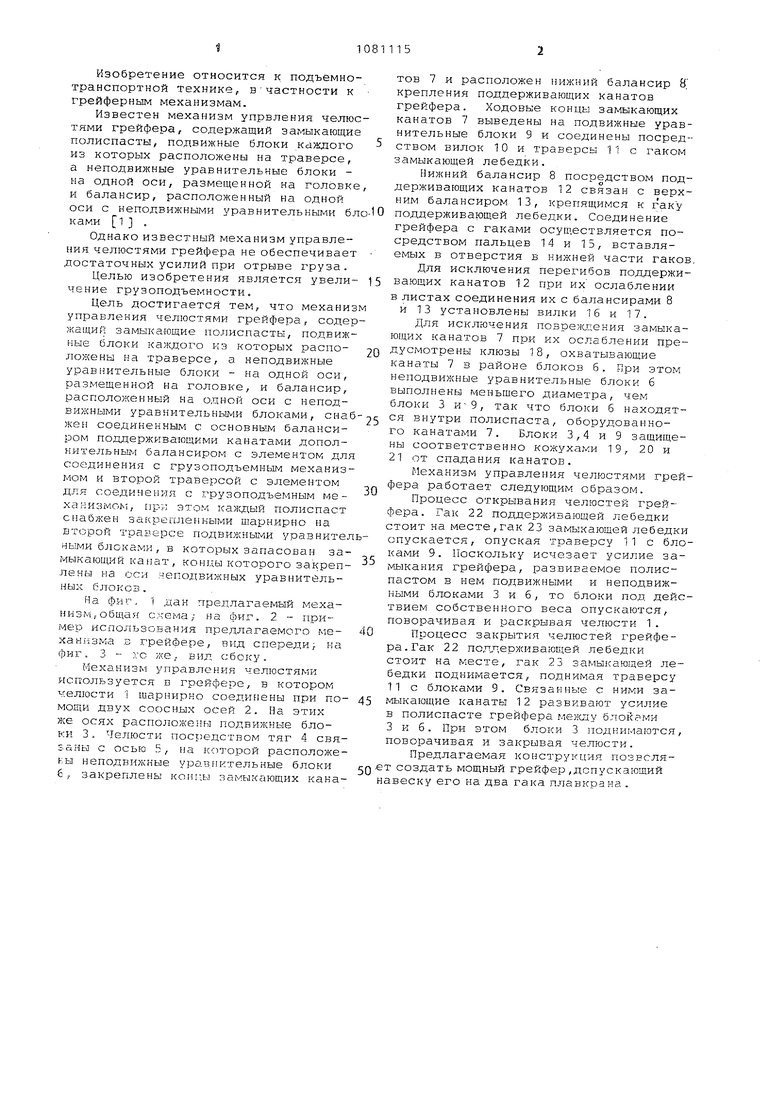
| название | год | авторы | номер документа |
|---|---|---|---|
| МЕХАНИЗМ ПОДЪЕМА ПЛАВУЧЕГО КРАНА | 1992 |
|
RU2041154C1 |
| Многочелюстной грейфер | 1980 |
|
SU1106781A1 |
| Канатный грейфер | 1976 |
|
SU591388A1 |
| Грейфер | 1979 |
|
SU948840A1 |
| ГРЕЙФЕР ДЛЯ РЫТЬЯ КОЛОДЦЕВ | 1985 |
|
SU1347346A1 |
| УСТРОЙСТВО ДЛЯ ТРАНСПОРТИРОВАНИЯ ГОРНОЙ МАССЫ | 1994 |
|
RU2119055C1 |
| БЕЗОПАСНЫЙ КАНАТНЫЙ ПОЛИСПАСТ | 2004 |
|
RU2266860C1 |
| Грейфер | 1990 |
|
SU1754628A1 |
| Грейфер | 1989 |
|
SU1677003A1 |
| Устройство для демонстрации работы грузозахватного механизма | 1989 |
|
SU1688274A1 |

МЕХАНИЗМ УПРАВЛЕНИЯ ЧЕЛЮСТЯМИ ГРЕЙФЕРА, содержащий заг шкающи полиспасты, подвижные блоки каждого из которых расположены на траверсе а неподвижные уравнительные блоки на одной оси, размещенной на головке, и балансир, расположенный на одной оси с неподвижными уравнительными блоками, отличающийся тем, что, с целью увеличения грузоподъемности, он снабжен соединенным с основным балансиром поддерживающими канатами, дополнительным балансиром с элементом для соединения с грузоподъемным механизмом и второй траверсой с элементом для соединения с грузоподъемным механизмом, при этом каждый полиспаст снабжен закрепленными шарнирно на второй траверсе подвижными уравнительными блоками, в которых запасован замыкающий канат, концы .. которого закреплены на оси неподвиж- § ных уравнительных блоков.
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Грейферные механи мы | |||
| М., 1967, с | |||
| Способ очищения сернокислого глинозема от железа | 1920 |
|
SU47A1 |
| Машина для добывания торфа и т.п. | 1922 |
|
SU22A1 |
| « | |||
