Техническое решение относится к области гироскопической техники и предназначено для модернизации контура обратной связи датчиков угловой скорости с дискретным выходом (ДУС ДВ) для бескарданных инерциальных навигационных систем (БИНС). Список использованных источников
1. Гилмор и Фельдман "Гироскоп с обратной связью по моменту для бескарданных систем", "Вопросы ракетной техники" (ВРТ) №9,1970 г.
2. Гелб и Сутерленд "Способы уменьшения ошибок бескарданных систем, вызванных погрешностями гиротахометров", "ВРТ" №6, 1969 г.
3. "Электроника", 1971, №11, стр.18-23.
4. Патент США №3408873, кл. 73-517, 25.03.65
5. Навигация, наведение и стабилизация в космосе. Под ред. Дж. Миллера, Москва, Машиностроение, 1970 стр.194-204.
6. Коновалов С.Ф. Никитин Е.А., Селиванова Л.М. Гироскопические системы. Часть 3, под ред. Д.С.Пельпора, Москва, "Высшая школа", 1980 (преобразователь "ток-цифровой код" с интегрирующей емкостью, стр.35).
7. А.С. №529420 от 16.04.75, G 01 Р 9/02, Датчик угловой скорости с дискретным выходом. Бюллетень №35, 25.09.76.
8. Никитин Е.А.. Коновалов С.Ф. Работа ключа на комплексную нагрузку в схемах с широтно- и частотно-импульсной модуляцией, а также в релейных схемах. Журнал "Метрология", 1974, №4.
9. Андейченко К.Н. Динамика поплавковых гироскопов и акселерометров. Москва, "Машиностроение", 1987 г.
Известные датчики угловых скоростей используют во время действия входной угловой скорости относительно входной оси (IA) способ формирования управляющего воздействия на поплавок ДУС-ДВ, включающий формирование сигнала с датчика угла отклонения поплавка посредством "электрической пружины" (усилителя обратной связи) на датчик момента, ток в его обмотке управления при помощи аналого-цифрового преобразователя (АЦП) превращают в выходные информационные импульсы (стр.31 /6/, прототип). Здесь описан принцип преобразования сигнала в дискретную форму для поплавковых маятниковых акселерометров. В ДУС он полностью идентичен. Суть способа состоит в том, для формирования дискретного выходного сигнала снимают выходное напряжение с резистора включенного последовательно с обмоткой управления (т.е. в цепь) датчика момента. Это напряжение и преобразуют в дискретный сигнал посредством "преобразователя напряжение-код" (ПНК). Недостатком таких датчиков является преобразование тока датчика момента вне контура обратной связи, в частности вне цепи датчика момента. Здесь преобразованный сигнал никак не учитывается "электрической пружиной" и в связи с этим формируется интегральная (накапливающаяся) погрешность, обусловленная квантованием, на длительных промежутках времени опроса прибора бортовой цифровой вычислительной машиной (БЦВМ). Физическая сущность формирования этой погрешности такова. При отклонении основания от первоначального положения на угол, равный, например, некратному числу Км угловых секунд: 1,5 Км (здесь Км - масштабный коэффициент ДУС ДВ) на выходе ПНК прибора появится дискретный выходной сигнал, соответствующий величине 2 Км, т.к. ПНК воспринимает угол отклонения основания 0,5 Км как величину, равную Км угловых секунд. В связи с этим и будет накапливаться погрешность квантования (преобразования в дискретную форму) сигнала с ДУС с аналоговой обратной связью и сопротивлением R в цепи датчика момента (ДМ) в БЦВМ /2/. Такое преобразование допустимо из-за простоты схемного решения, когда требуется преобразование сигнала с ДУС не хуже 1-0,1% и предполагается кратковременная работа прибора. Это оправдано для ДУС ДВ сравнительно невысокой точности, т.е. когда механика прибора не позволяет обеспечить высокую точность измерения. Для приборов среднего класса точности и высокоточных ДУС ДВ для БИНС требуется выбор более высокоточного преобразователя тока датчика момента в дискретный выходной сигнал. Такими преобразователями являются (в порядке возрастания точности преобразования и усложнения):
- "ток-цифровой код" с интегрирующей емкостью С, включенной в цепь датчика момента (см. стр.35 /6/);
- "ток-цифровой код", использующий принцип частотно-импульсной модуляции (см. /1/, /3/ и /7/);
- "ток-цифровой код", использующий принцип широтно-импульсной модуляции сигнала (см. /4/ и 151).
Известные (стр.35, рис.1.17 /6/) датчики угловых скоростей (там акселерометры) используют преобразование тока датчика момента при помощи преобразователя "ток-цифровой код" ("ток-число импульсов") с интегрирующей емкостью. Такой преобразователь позволяет получить точность преобразования не хуже 0.01%. Однако использование интегрирующей емкости с уникальными характеристиками по стабильности параметров и значительным размерам несколько ограничивает применение этого преобразователя. До настоящего времени в связи с его простотой именно такой преобразователь использовался в ДУС ДВ для БИНС Российского прибора, используемого для полетов на международную космическую станцию (МКС). Однако в связи со значительными размерами электронного блока усилителя обратной связи (УОС) и преобразователя тока датчика момента в дискретную форму разработки 80-х годов потребовалось его модернизация для уменьшения размеров и массы. В связи с этим встал вопрос о выборе схемы преобразователя тока датчика момента в дискретную форму с учетом современной реально существующей элементной базы.
Известны датчики угловой скорости с дискретным выходом, в которых формируются импульсы тока стабильной частоты, длительности и амплитуды /3/. Эти импульсы с помощью коммутатора подаются в обмотку датчика момента. Разность положительных и отрицательных импульсов, протекающих в обмотке моментного датчика в единицу времени, пропорциональна угловой скорости. Известны также устройства, в которых в цепи обратной связи формируются импульсы положительной и отрицательной полярности, причем их длительность кратна эталонной частоте счета /4/, /5/. Однако необходимость использования в таких устройствах источника постоянного тока для формирования импульсов обратной связи приводит к появлению погрешности при переключении коммутатора из-за неидеальности фронтов. Действительно погрешность эта существует (см. в /1/ и /8/), но она является погрешностью высшего порядка малости по сравнению с описанной только что интегральной погрешностью квантования. Пути уменьшения этой погрешности также рекомендованы в /8/. Однако в связи с массой дополнительных факторов в ДУС ДВ, влияющих на формирование фронтов импульсов тока в обмотке управления датчика момента и других причин (описанных в /1/), влияющих на формирование момента, эти рекомендации без оговорок не выполняются. Поэтому пришлось все же при настройке ДУС-ДВ методом перебора параметров выбирать значения корректирующего RC-контура, отличные от рекомендуемых. Следует отметить, что некоторые из перечисленных датчиков угловой скорости /3/, /4/ и /5/ начинают осуществлять так или иначе преобразование сигнала контура обратной связи в дискретную форму уже непосредственно в самом контуре. Однако во всех перечисленных технических решениях отсутствуют рекомендации по выбору параметров преобразователя такими, чтобы обеспечить заданную точность ДУС-ДВ с учетом действующей входной угловой скорости, реальных конструктивных параметров механической части прибора и его электроники, в частности амплитуды стабилизируемого тока. При этом способ формирования управляющего воздействия в /7/ в явном виде не использует формирование дискретного выходного сигнала в контуре обратной связи. Здесь предложено осуществлять получение импульсов тока в обмотке управления датчика момента вообще в цепи стабилизатора тока. Однако указание на то, что при квантовании идет синхронизация подаваемых в обмотку управления импульсов тока с частотой квантования, все же имеется (см. связь источника 15 и усилителя 4). Недостаток прототипа - недостаточная точность измерения ДУС-ДВ при использовании квантования тока датчика момента "преобразователем напряжение-код". Недостатком выявленных аналогов (которые существуют на уровне идеи) является отсутствие рекомендаций по обеспечению заданной точности ДУС-ДВ с учетом выбранного периода Т квантования, исходя из заданного масштабного коэффициента Км, реальных параметров датчиков (Кдм, I) и диапазона ожидаемой входной угловой скорости (ωвх).
Задача изобретения - обеспечение заданной точности ДУС-ДВ при миниатюризации электронного блока контура обратной связи и преобразователя тока датчика момента в дискретную форму с учетом заданного масштабного коэффициента ДУС-ДВ, параметров механики и электроники и диапазона входной угловой скорости. Задача изобретения - это создание функциональной схемы ДУС-ДВ с простейшим устройством квантования выходного сигнала "электрической пружины" - тока датчика момента в дискретный выходной сигнал в виде информационных импульсов.
Решение задачи формирования управляющего воздействия в датчике угловой скорости с дискретным выходом включает формирование сигнала с датчика угла отклонения поплавка посредством "электрической пружины" на датчик момента, имеет особенность такую, что осуществляют фазочувствительное усиление и детектирование сигнала с датчика угла, преобразуют его корректирующим контуром, обеспечивают при этом заданный показатель колебательности и преобразуют ток датчика момента в дискретный выходной сигнал так, что квантуют ток датчика момента непосредственно в его обмотке, отрабатывают "электрической пружиной" (контуром обратной связи электрическим путем) несовпадение суммарной длительности пачек информационных импульсов стабилизированной амплитуды и средней величины тока обратной связи, соответствующей угловой скорости так, что на предыдущем периоде квантования формируют большее число информационных импульсов за период квантования, чем это должно соответствовать действующей угловой скорости, а на следующем периоде квантования формируют меньшее число информационных импульсов, получают при этом, что среднее число информационных импульсов на дискретном выходе ДУС на интервале времени опроса прибора бортовой цифровой вычислительной машиной соответствует действующей угловой скорости, тем самым минимизируют погрешность преобразования тока в обмотке датчика момента датчика угловой скорости в дискретный выходной сигнал в виде информационных импульсов на интервале времени опроса (дискретного выхода датчика угловой скорости) бортовой цифровой вычислительной машиной, причем период Т квантования выбирают с учетом заданной величины масштабного коэффициента Км ДУС, тока стабилизатора I, крутизны датчика момента Кдм и кинетического момента Н из соотношения Т=Км Н/I Кдм, при этом ток стабилизатора I, крутизну обмотки управления датчика момента Кдм и кинетического момента Н выбирают с учетом заданного диапазона измерения ωвх - угловой скорости из соотношения I Кдм≥Н ωвх.
Преобразуют ток датчика момента в дискретный выходной сигнал так, что для выбранной величины периода Т квантования регулируют ширину зоны нечувствительности порогового устройства трехпозиционной импульсной обратной связи таким образом, чтобы при действии угловой скорости вокруг входной оси датчика одного направления на дискретном его выходе информационные импульсы следовали бы только с одного соответствующего ей дискретного канала.
Задача решается так, что датчик угловой скорости с дискретным выходом, содержащий гироузел с датчиком угла и момента, усилитель обратной связи, мостовой переключатель (коммутатор) и стабилизатор площади импульсов тока, имеет особенность такую, что усилитель обратной связи включает последовательно соединенные фазочувствительный усилитель и детектор, корректирующий контур, трехпозиционное пороговое устройство, два управляющих выхода которого подключены к двум парам управляющих транзисторных ключей мостового переключателя, при этом в одну диагональ мостового переключателя включена обмотка управления датчика момента, а другая диагональ через масштабное сопротивление соединена со стабилизатором тока, причем к каждому из управляющих выходов порогового устройства подключен двухканальный генератор информационных импульсов положительного N+ и отрицательного N- вращения, выходы которого являются дискретным выходом датчика угловой скорости, кроме того, эти же выходы генератора импульсов соединены синхронизирующим входом порогового устройства.
Фиг.1. Функциональная схема датчика угловой скорости с дискретным выходом. Здесь ПТУ - поплавковый гироузел 1; ДУ - датчик угла 2, ДМ - датчик момента 3; ФЧВ - фазочувствительный усилитель-выпрямитель (детектор) 4; КК - корректирующий контур 5; ПУ - трехпозиционное пороговое устройство 6; МП - мостовой переключатель 11 с транзисторными ключами (7-10); в диагональ МП 11 включена обмотка управления датчика момента 3, имеющая активное сопротивление Кдм и конечную индуктивность L; параллельно обмотке управления ДМ 3 включена RC-корректирующая цепь. СТ - стабилизатор тока 12 - I, включенный через масштабное сопротивление Rм в другую диагональ МП 11. ГИ - двухканальный генератор 13 выходных счетных информационных импульсов (каналов положительного N+ и отрицательного N- вращения). ДУС-Л9Д - марка одного из используемых ДУС как чувствительного элемента ДУС-ДВ.
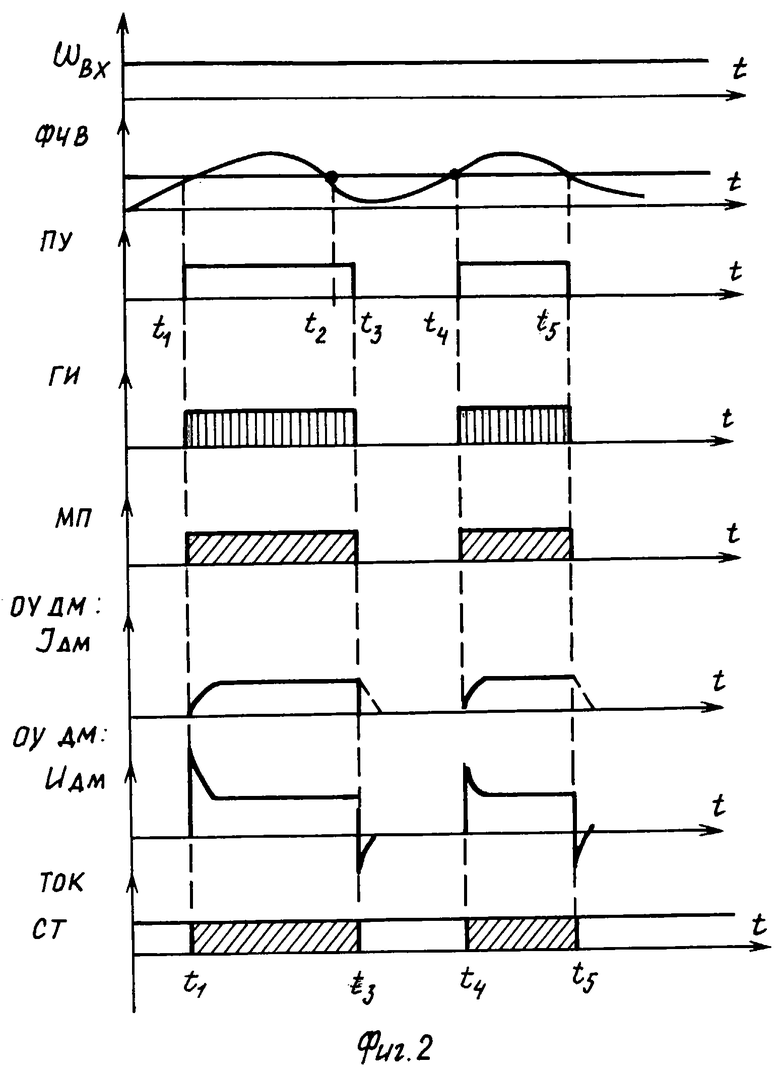
Фиг.2. Временная диаграмма следования основных сигналов в импульсном контуре обратной связи ДУС-ДВ, представленного на фиг.1. На фиг.1 первая эпюра отражает действующую постоянную угловую скорость ωвх относительно входной оси (IA) ДУС-ДВ. Эпюра ФЧВ показывает изменение сигнала на выходе ФЧВ. ПУ - выходной сигнал порогового устройства ПУ 6. Особенность изображения - это отключение устройством ПУ 6 тока в обмотке управления датчика момента 3 в момент времени не t2, a - в t3, при формировании "заднего" фронта импульса с генератора 13. МП - эпюра изменения входного управляющего сигнала на одной из двух пар транзисторных переключателей (7, 9 или 8, 10). ОУ ДМ - временные диаграммы изменения тока Iдм и напряжения Uдм в обмотке управления датчика момента ДМ 3. Эпюра "ток СТ" показывает формирование тока на выходе стабилизатора 12 на промежутках t1-t3, t4-t5, подаваемого через МП 11 в обмотку управления датчика момента 3.
НОВИЗНА. Предложен способ преобразования (квантования) выходного сигнала контура обратной связи, формирующего импульсный ток в обмотке датчика момента без образования интегральной погрешности, обусловленной квантованием. Причем впервые увязан период квантования Т с масштабным коэффициентом Км ДУС-ДВ, параметрами механики и электроники прибора: Кдм - крутизны датчика момента, тока стабилизатора I и диапазона ожидаемой входной угловой скорости ωвх. Предложена простейшая (в сравнении с выше перечисленными) схема реализации контура релейно-импульсной обратной связи, прошедшая испытания и подтвердившая свои точностные характеристики по линейности масштабного коэффициента в заданном диапазоне входной угловой скорости и стабильности скорости дрейфа ДУС-ДВ, независящего от ускорения.
Обоснование соотношений, внесенных в формулу технического решения.
Известна математическая модель датчика угловой скорости с "электрической пружиной" (стр.64, 65 /9/), которым по существу является датчик угловой скорости с дискретным выходом. В таком приборе дополнительно имеется устройство, преобразующее ток обратной связи ("электрической пружины") в информационные импульсы определенной длительности (см. стр.35 /6/, применительно к акселерометрам). Частота следования этих импульсов характеризует величину входной угловой скорости для ДУС-ДВ, а число - угол поворота датчика вокруг входной оси.
В установившемся режиме вращения основания при определении масштабного коэффициента ДУС-ДВ механическим способом уравнение движения поплавка прибора вокруг выходной оси, представляющее собой уравнения баланса моментов, имеет вид: 
где Кдм - коэффициент передачи датчика момента ДУС-ДВ;
i - ток в обмотке датчика момента;
Н - кинетический момент датчика;
р1=ωвх - угловая скорость вращения основания вокруг входной оси;
MB - возмущающий (вредный) момент вокруг оси прецессии, обусловленный технологическими факторами изготовления ДУС-ДВ и внутренней вибрацией в опорах носителя кинетического момента (/9/ стр.69).
Полагая КДМ, Н, МВ параметрами, независящими от времени, интегрируя (1.1)
получаем

где Км=Кдм·I·Т/Н - масштабный коэффициент ДУС-ДВ;
откуда находим

угол поворота платформы с угловой скоростью p1=ωвх:

N' - число информационных импульсов ДУС-ДВ, причем
возмущающий момент вокруг выходной оси ДУС-ДВ:
рДР=МВ/Н - скорость дрейфа ДУС-ДВ при входной угловой скорости p1=0; I, Т - амплитуда и длительность информационных импульсов. При МВ=0 уравнение баланса моментов, когда ДУС ДВ еще выполняет свои функции, приобретает вид I Кдм≥Н ωвх (1.4). Соотношения (1.3) и (1.4) внесены в формулу технического решения.
Способ формирования управляющего воздействия в ДУС-ДВ и датчик угловой скорости с дискретным выходом, использующий этот способ, реализуются следующим образом (фиг.1 и 2). ДУС с дискретным выходом (фиг.1), содержащий гироузел 1 с датчиком угла 2 и момента 3, усилитель обратной связи, мостовой переключатель (коммутатор) 11 и стабилизатор площади импульсов тока 12, имеет особенность такую, что усилитель обратной связи (т.е. "электрическая пружина") включает последовательно соединенные фазочувствительный усилитель и детектор 4, корректирующий контур 5, трехпозиционное пороговое устройство 6, два управляющих выхода которого подключены к двум парам (7, 9 или 8, 10) управляющих транзисторных ключей мостового переключателя 11, при этом в одну диагональ мостового переключателя 11 включена обмотка управления датчика момента 3, а другая диагональ через масштабное сопротивление Rм соединена со стабилизатором тока 12, причем к каждому из управляющих выходов порогового устройства 6 подключен двухканальный генератор 13 информационных импульсов положительного N+ и отрицательного N- вращения, выходы которого являются дискретным выходом ДУС и эти же выходы генератора 13 импульсов соединены синхронизирующим входом порогового устройства 6. Порядок действий способа включает
- формирование сигнала с датчика угла 2 отклонения поплавка ДУС посредством "электрической пружины" на датчик момента 3,
- осуществляют фазочувствительное усиление и детектирование ФЧВ 4 сигнала с датчика угла 2 и преобразуют его корректирующим контуром 5, обеспечивают при этом заданный показатель колебательности,
- преобразуют ток датчика момента 3 в дискретный выходной сигнал так, что квантуют ток датчика момента 3 непосредственно в его обмотке управления,
- отрабатывают "электрической пружиной" (контуром обратной связи) несовпадение суммарной длительности пачек информационных импульсов (N+ или N-) с ГИ 13 стабилизированной амплитуды I и средней величины тока обратной связи, соответствующей угловой скорости ωвх так, что на предыдущем периоде Т квантования формируют большее число информационных импульсов N за период квантования, чем это должно соответствовать действующей угловой скорости ωвх, а на следующем периоде квантования формируют меньшее число информационных импульсов N и получают при этом, что среднее число информационных импульсов на дискретном выходе ДУС на интервале времени опроса Т1=nT прибора ДУС-Л9Д бортовой цифровой вычислительной машиной соответствует действующей угловой скорости ωвх, тем самым минимизируют погрешность преобразования тока в обмотке датчика момента 3 ДУС в дискретный выходной сигнал в виде информационных импульсов N на интервале времени опроса Т1 (дискретного выхода ДУС) бортовой цифровой вычислительной машиной,
- причем период Т квантования выбирают с учетом заданной величины масштабного коэффициента Км ДУС с ДВ, тока стабилизатора 12 I, крутизны датчика момента 3 Кдм и кинетического момента Н ПГУ 1 ДУС из соотношения Т=КмН/I Кдм,
- при этом ток стабилизатора 12 I, крутизну обмотки управления ДМ 3 Кдм и кинетического момента Н ПТУ 1 ДУС выбирают с учетом заданного диапазона измерения ωвх - угловой скорости из соотношения I Кдм≥Нωвх.
Преобразуют ток датчика момента 3 в дискретный выходной сигнал так, что для выбранной величины периода Т квантования регулируют минимальную ширину зоны нечувствительности порогового устройства ПУ 6 трехпозиционной импульсной обратной связи таким образом, чтобы при действии угловой скорости ωвх вокруг входной оси ДУС одного направления на дискретном его выходе информационные импульсы N следовали бы только с одного соответствующего ей канала (только N+ или N-).
Работа ДУС с ДВ (см фиг.2). При вращении ДУС с дискретным выходом относительно входной оси поплавковый гироузел ПТУ 1 с датчиком угла 2 и момента 3 отклоняется от начального положения. На выходе ДУ 2 формируется сигнал, который проходит через усилитель обратной связи на мостовой переключатель (коммутатор) 11 и стабилизатор 12 площади импульсов тока формирует ток определенного направления в обмотке управления ДМ 3. Этот ток вырабатывает парирующий момент Кдм 1, компенсирующий входной гироскопический момент Н ωвх.
Усилитель обратной связи пропускает управляющий сигнал через последовательно соединенные фазочувствительный усилитель и детектор ФЧВ 4, корректирующий контур КК 5, трехпозиционное пороговое устройство ПУ 6 на два управляющих входа одной из пар транзисторных ключей (7, 9 или 8, 10) мостового переключателя МП 11.
Особенность работы контура импульсной обратной связи ДУС с ДВ следующая. При отклонении поплавка сигнал с датчика угла 2, преобразованный ФЧВ 4 и КК 5, поступает на вход порогового устройства ПУ 6. Трехпозиционное ПУ 6 настроено так, что оно имеет зону нечувствительности. Эта зона позволяет не формировать управляющее напряжение на выходе ПУ 6, когда сигнал с ДУ 2 - ФЧВ 4 меньше его порогового значения. Сигнал появляется на выходе ПУ 6 только тогда, когда величина напряжения с ДУ 2 превысит заранее выбранную зону нечувствительности ПУ 6. Т.е. тогда, когда на ДУС-ДВ действует входная угловая скорость. Итак, поплавковый гироузел отклоняется и в определенный момент оказывается за границей зоны нечувствительности. В момент t1, когда поплавок пересекает границу зоны нечувствительности на выходе ПУ 6, формируют сигнал на переключающие транзисторные ключи, например 7, 9. С этого момента t1 мостовой переключатель 11 вместе со стабилизатором 12 формирует ток I=Iдм в обмотке управления (ОУ) датчика момента ДМ 3. Передние фронты тока и напряжения Uдм выглядят так, как это показано на фиг.2, из-за наличия конечной величины индуктивности L ОУ ДМ 3. Стабилизатор тока 12 стремится сформировать ток в ОУ ДМ 3 неизменной амплитуды до момента времени t3.
При этом на поплавковый гироузел ПТУ 1, находящийся за зоной нечувствительности, кроме гироскопического момента, начинает дополнительно действовать и момент, формируемый датчиком момента 3. Важно, что момент ДМ 3 превышает момент гироскопический и поэтому поплавок изменяет направление своего углового движения и возвращается к исходному положению. При этом сигнал с датчика угла 2 ранее значительной величины уменьшается на столько, что выходное напряжение ФЧВ 4, становится меньше порогового значения напряжения ПУ 6. На выходе ПУ 6 формируется команда на отключение через соответствующие ключи мостовым переключателем 11 тока стабилизатора 12, протекавшего в обмотке управления ДМ 3.
В соответствии с предложенным способом происходит отключение управляющего сигнала на входах ключей 7, 9 не в момент времени t2, а в момент t3. Это происходит за счет специально введенной синхронизирующей связи с выходов ГИ 13 на синхронизирующий вход ПУ 6. Т.е. отключение обмотки управления ДМ 3 от стабилизатора тока СТ 12 происходит по "заднему" фронту информационного импульса ГИ 13 (момент t3). Результатом некоторого запаздывания и отключения тока стабилизатора 12 в ОУ ДМ 3 будет несколько большая величина момента Кдм I, сформированная датчиком момента 3 в сравнении с входным гироскопическим моментом Н ωвх. В этом случае поплавок при "возвращении" в зону нечувствительности "глубже в нее погрузится". На следующем периоде квантования включение тока в ОУ ДМ 3 происходит как и первом случае (см. момент t4), а отключение тока стабилизатора 12 от обмотки управления ДМ 3 произойдет чуть раньше (момент t5) за счет того, что поплавок ПТУ 1 меньше отклонится от первоначального положения и поэтому чуть раньше пересечет при "обратном" направлении углового движения границу зоны нечувствительности. Далее процесс повторяется. Это о движении поплавка. В это время пороговое устройство ПУ 6 при помощи генератора импульсов ГИ 13 стабильной частоты измеряет время нахождения поплавка за границей зоны нечувствительности. Это осуществляется формированием пачек импульсов на выходе ГИ 13 (см. фиг.2) каналов положительного N+ или отрицательного N- вращения. Импульсы формируются только тогда, когда поплавок находится за границей зоны нечувствительности (см. фиг.2). Эти импульсы N, каждый из которых является мерой отклонения поплавка и углового перемещения основания, поступают на вход БЦВМ, где вычисляется величина угла отклонения основания от начального положения по простейшей формуле Δθ=Км N.
Замечание. В мостовом переключателе установлено масштабное сопротивление, соединенное со стабилизатором тока. Этот резистор обеспечивает при настройке ДУС-ДВ заданную величину масштабного коэффициента.
Технический результат - обеспечение заданной точности ДУС-ДВ при его модернизации - миниатюризации электронного блока контура обратной связи - "электрической пружины" с учетом заданного масштабного коэффициента, параметров механики и электроники ДУС и диапазона входной угловой скорости. Предложен ДУС-ДВ с устройством квантования выходного сигнала не имеющим интегральной погрешности квантования тока датчика момента и достаточно простой для реализации релейно-импульсной электронной схемой преобразования этого тока в дискретный выходной сигнал в виде информационных (счетных) импульсов.
Технический эффект. Предложен способ преобразования выходного сигнала - тока датчика момента высокоточного датчика угловой скорости в дискретную форму, обеспечивающий минимизацию интегральной погрешности преобразования и учитывающий заданную величину масштабного коэффициента Км, параметры механической части прибора (в частности крутизны датчика момента Кдм и кинетического момента Н ДУС) и его электроники (тока стабилизатора I). Величина масштабного коэффициента задается исходя из известных рекомендаций /1/: 1-6 угловых секунд и главное с учетом заложенной в БЦВМ номинальной величины. Предложена функциональная схема электронного блока ДУС-ДВ, включающая "электрическую пружину" и преобразователь тока датчика момента в дискретный выходной сигнал. Представленные здесь способ и устройство, его реализующее, в соответствии с п.2.3 Правил признаются удовлетворяющими требованию "Единства изобретения".
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ НАСТРОЙКИ БЛОКА ДАТЧИКОВ УГЛОВОЙ СКОРОСТИ С ДИСКРЕТНЫМ ВЫХОДОМ, СПОСОБ ОПРЕДЕЛЕНИЯ СКОРОСТИ ДРЕЙФА ДАТЧИКА УГЛОВОЙ СКОРОСТИ, СПОСОБ ОПРЕДЕЛЕНИЯ ПОКАЗАТЕЛЯ КОЛЕБАТЕЛЬНОСТИ И ПОЛОСЫ ПРОПУСКАНИЯ ДАТЧИКА УГЛОВОЙ СКОРОСТИ, СПОСОБ ОПРЕДЕЛЕНИЯ МАСШТАБНОГО КОЭФФИЦИЕНТА ДАТЧИКА УГЛОВОЙ СКОРОСТИ И СПОСОБ ОПРЕДЕЛЕНИЯ УГЛА ЮСТИРОВКИ ДАТЧИКА УГЛОВОЙ СКОРОСТИ | 2004 |
|
RU2269747C1 |
| СПОСОБ ПОДВЕСА ЧУВСТВИТЕЛЬНОГО ЭЛЕМЕНТА ПОПЛАВКОВОГО ПРИБОРА (ВАРИАНТЫ) И УСТРОЙСТВО, ЕГО РЕАЛИЗУЮЩЕЕ (ВАРИАНТЫ) | 2005 |
|
RU2276326C1 |
| СПОСОБ ИЗМЕРЕНИЯ ПАРАМЕТРОВ ДВИЖЕНИЯ ЖЕЛЕЗНОДОРОЖНОГО ПОДВИЖНОГО СОСТАВА, ПОДВЕСА ЧУВСТВИТЕЛЬНОГО ЭЛЕМЕНТА ПОПЛАВКОВОГО МАЯТНИКОВОГО АКСЕЛЕРОМЕТРА И УСТРОЙСТВА ЕГО РЕАЛИЗУЮЩИЕ | 2005 |
|
RU2281874C1 |
| СТЕНД ДЛЯ КОНТРОЛЯ ПРЕЦИЗИОННОГО ГИРОСКОПИЧЕСКОГО ДАТЧИКА УГЛОВОЙ СКОРОСТИ | 1992 |
|
RU2044274C1 |
| УНИВЕРСАЛЬНЫЙ СТЕНД ДЛЯ КОНТРОЛЯ ПРЕЦИЗИОННЫХ ГИРОСКОПИЧЕСКИХ ИЗМЕРИТЕЛЕЙ УГЛОВОЙ СКОРОСТИ | 2009 |
|
RU2403538C1 |
| БЕЗОБОГРЕВНОЙ ТЕРМОИНВАРИАНТНЫЙ ЭЛЕКТРОМЕХАНИЧЕСКИЙ ПОПЛАВКОВЫЙ ИЗМЕРИТЕЛЬ УГЛОВОЙ СКОРОСТИ | 2013 |
|
RU2548377C1 |
| ШИРОКОДИАПАЗОННЫЙ СТЕНД ДЛЯ КОНТРОЛЯ ИЗМЕРИТЕЛЕЙ УГЛОВОЙ СКОРОСТИ | 2008 |
|
RU2378618C2 |
| СТЕНД ДЛЯ КОНТРОЛЯ ИЗМЕРИТЕЛЕЙ УГЛОВОЙ СКОРОСТИ | 2007 |
|
RU2339912C1 |
| СПОСОБ ГИДРОСТАТИЧЕСКОГО ПОДВЕСА ЧУВСТВИТЕЛЬНОГО ЭЛЕМЕНТА ДВУХСТЕПЕННОГО ГИРОСКОПА (ВАРИАНТЫ) | 2004 |
|
RU2276327C1 |
| СТЕНД ДЛЯ КОНТРОЛЯ ИЗМЕРИТЕЛЯ УГЛОВЫХ СКОРОСТЕЙ | 1995 |
|
RU2115129C1 |
Изобретения предназначены для модернизации контура обратной связи датчиков угловой скорости с дискретным выходом (ДУС-ДВ) для бескарданных инерциальных навигационных систем (БИНС). Способ преобразования выходного сигнала - тока датчика момента высокоточного датчика угловой скорости в дискретную форму обеспечивает минимизацию интегральной погрешности преобразования и учитывает заданную величину масштабного коэффициента Км, параметры механической части прибора (в частности, крутизны датчика момента Кдм и кинетического момента Н ДУС) и его электроники (тока стабилизатора I). Функциональная схема электронного блока ДУС-ДВ для реализации способа включает "электрическую пружину" и преобразователь тока датчика момента в дискретный выходной сигнал в виде информационных импульсов. Технический результат - обеспечение заданной точности ДУС-ДВ при миниатюризации электронного блока контура обратной связи - "электрической пружины" с учетом заданного масштабного коэффициента, параметров механики и электроники ДУС и диапазона входной угловой скорости. ДУС-ДВ с устройством квантования выходного сигнала не имеет интегральной погрешности квантования тока датчика момента. 2 с. и 1 з.п. ф-лы, 2 ил.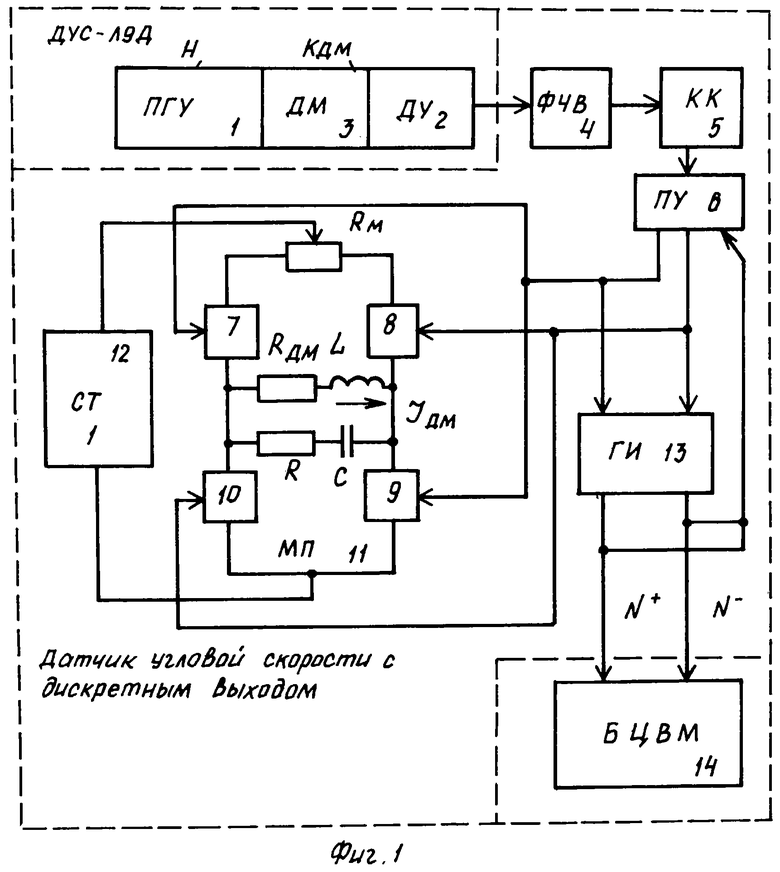
| Устройство для измерения угловой скорости | 1990 |
|
SU1830484A1 |
| Устройство для измерения угловой скорости | 1991 |
|
SU1793382A1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ УГЛОВЫХ СКОРОСТЕЙ ПОДВИЖНОГО ОБЪЕКТА С ПОМОЩЬЮ ТРЕХСТЕПЕННОГО ГИРОСКОПА С ЭЛЕКТРИЧЕСКОЙ ПРУЖИНОЙ | 1993 |
|
RU2111455C1 |
| Датчик угловой скорости с дискретным выходом | 1965 |
|
SU529420A1 |
| Устройство для измерения угловой скорости | 1986 |
|
SU1530998A1 |
| JP 6323859 А, 25.11.1994 | |||
| Выпарной аппарат | 1971 |
|
SU445441A1 |
| US 3408873 А, 05.11.1968. | |||

