Изобретение относится к сельско му хозяйству, в частности к автоматическому вождению транспортных
средств.
Известна система для автоматического вождения транспортного средства, содержащая ферромагнитные указатели и транспортное средство с магниточувствительными датчиками левого и правого поворота в цепи магнитопроводов источников магнитного поля с двумя крайними и одним среднимполюсными наконечниками и исполнительными реле механизма поворота . 1 .
Недостатком данной машины является сложность и большая металлоемкость , а также отсутствие возможности обеспечения остановок и стоянок транспортного средства при рабте в автоматическом режиме.
Наиболее близкой к предлагаемой по техническому решению является система, содержащая заделанный по поверхности почвы ферромагнитный следоуказатель и транспортное средство, содержащее магниточувствительные датчики левого и правого поворота и прямого движения, установленные в цепи магнитопроводов источников магнитного поля с полюсными наконечниками левого и правого поворота и средним полюсным наконечником, обмотки исполнительного реле, соединенные через нормально откры::ые контакты, обмотки соленоидов левого и правого поворота, соединенные с помощью нормально открытых и нормально закрытых контактов, обмотки реле газа и скорости с нормально открытыми и нормально закрытыми контактами, обмотки соленоидов реле газа и реле скорости с контактами 2j .
Недостатками известной системы являются также сложность и большая металлоемкость.
. Цель изобретения - упрощение конструкции, снижение металлоемкости.
Поставленная цель достигается тем, что ферромагнитный следоуказатель выполнен в виде непрерывного продольного элемента по оси движения, при этом полюсные наконечники левого и правого поворота и средний полюсный наконечник установлены впереди транспортного средства, причем средний полюсный наконечник установлен сзади полюсных наконечников левого и правого поворота.
Система снабжена поперечными следоуказателями, расположенными поперек ферромагнитного следоуказателя, шириной, равной расстоянию между полюсными наконечниками правого И левого поворота.
Система снабжена дополнительным средним наконечником, расположенным впереди полюсных наконечников правого и левого поворота.
Транспортное средство снабжено обмоткой реле времени и нормально открытыми контактами.
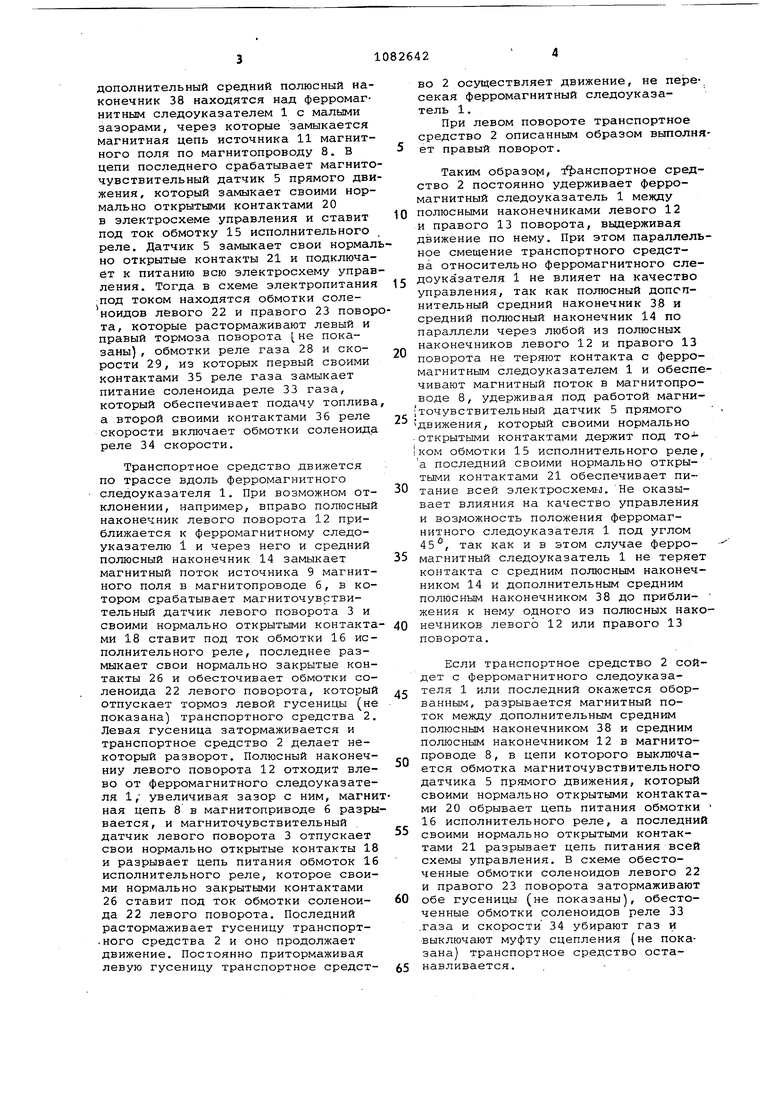
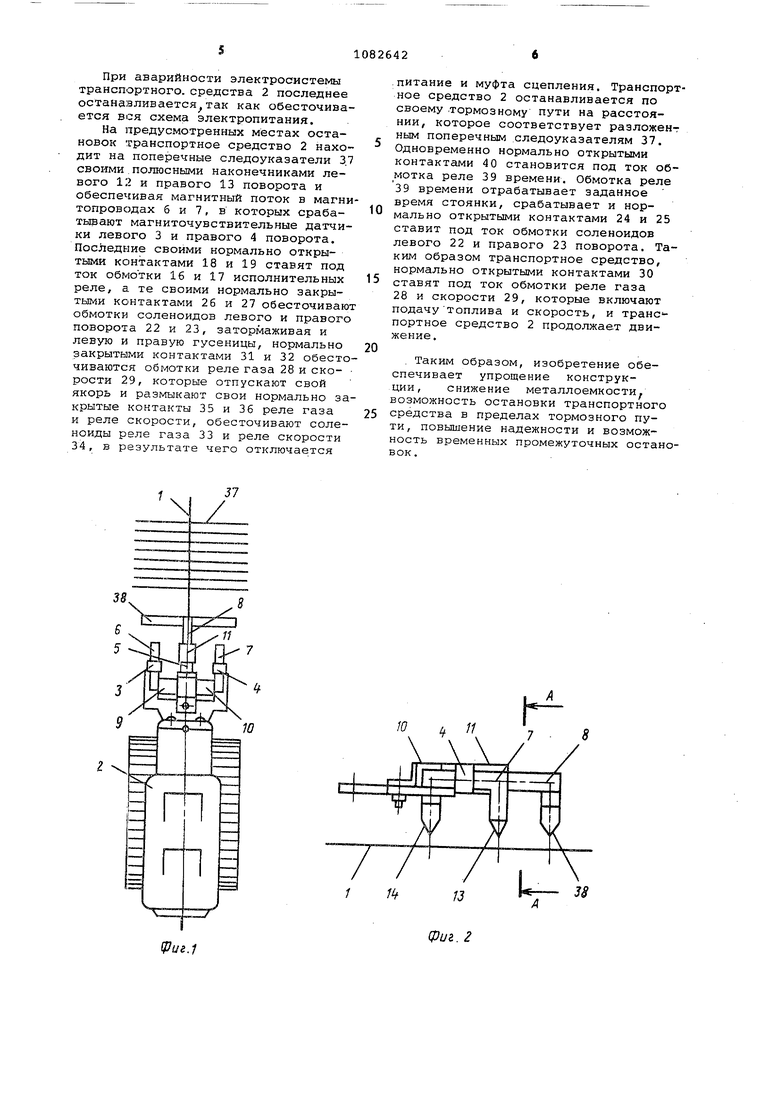
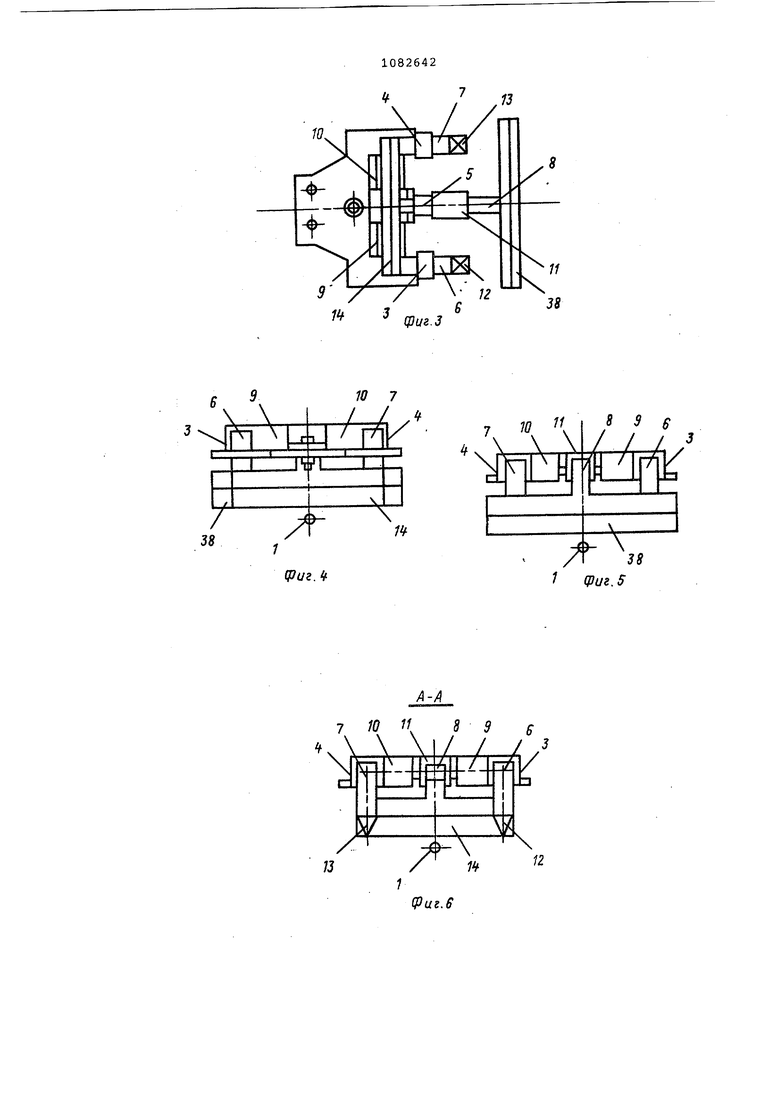
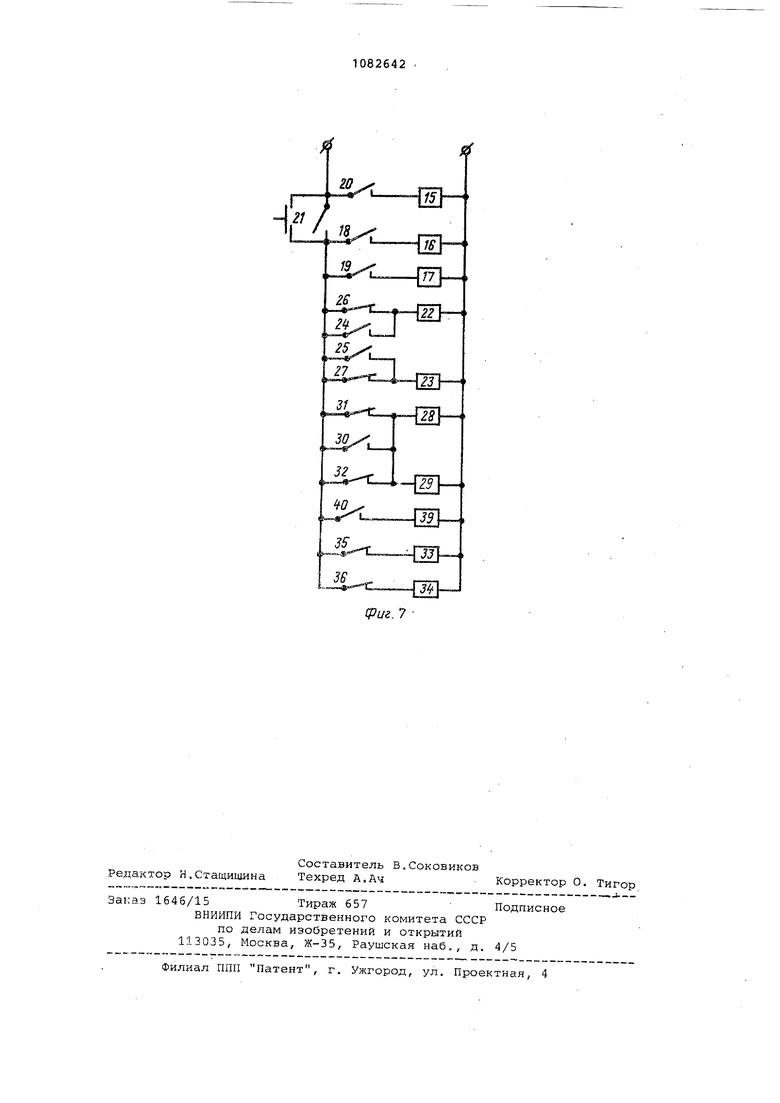
На фиг. 1 показана система, общий ВИД}на фиг. 2 - то же, вид сбоку; на фиг. 3 - то же, вид снизу; на фиг. 4 - то же, вид слева; на фиг. 5 - то же, вид справа; на фиг. 6 - разрез А-А на фиг.2; на фиг. 7 - принципиальная электрическая схема системы.
Система для автоматического вождния транспортного средства включает заделанный на поверхности почвы ферромагнитный следоуказатель 1 и транспортное средство 2, содержащее магниточувствительные датчики левого 3 и правого 4 поворота и прямого движения 5, установленные в цепи магнитопроводов 6-8 источников 9-11 магнитного поля с полюсными наконечниками левого 12 и правого 13 поворота и средним полюсным наконечником 14,обмотки 15 - 17 исполнительного реле, соединенные через нормально открытые контакты 1821, обмотки соленоидов левого 22 и правого 23 поворота, соединенные с помощью нормально открытых 24 и 2 и нормально закрытых 26 и 27 контактов, обмотки реле газа 28 и скорости 29 с нормально открытыми 30 и нормально закрытыми 31 и 32 контактами, обмотки соленоидов реле 33 газа и реле 34 скорости с контактами 35 и 36, при этом ферромагнитный следоуказатель 1 выполнен в виде непрерывного продольного элемента по оси движения, а полюсные наконечники левого 12 и правого 13 поворота и средний полюсный наконечник 14 установлены впереди транспортного средства 2, при этом средний полюсный наконечник 14 установлен сзади полюсных наконечников левого 12 и правого 13 поворота, а также поперечный следоуказатель 37, расположенный поперек ферромагнитного следоуказателя 1, шириной, равной расстоянию между полюсными наконечниками правого 13 и левого 12 поворота, дополнительны средний полюсный наконечник 38, расположенный впереди полюсных наконечников правого и левого поворота и обмотку 39 реле с нормально открытыми контактами 40.
Система работает следующим образом.
Транспортное средство 2 выводят на трассу и пускают вдоль ферромагнитного следоуказателя 1. При этом средний полюсный наконечник 14 и
дополнительный средний полюсный наконечник 38 находятся над ферромагнитным следоуказателем 1 с малыми зазорами, через которые замыкается магнитная цепь источника 11 магнитного поля по магнитопроводу 8. В цепи последнего срабатывает магниточувствительный датчик 5 прямого движения, который замыкает своими нормально открытыми контактами 20 в электросхеме управления и ставит под ток обмотку 15 исполнительного реле. Датчик 5 замыкает свои нормално открытые контакты 21 и подключает к питанию всю электросхему управления. Тогда в схеме электропитания под током находятся обмотки соленоидов левого 22 и правого 23 поворта, которые растормаживают левый и правый тормоза поворота не показаны) , обмотки реле газа 28 и скорости 29, из которых первый своими контактами 35 реле газа замыкает питание соленоида реле 33 газа, который обеспечивает подачу топлива а второй своими контактами 36 реле скорости включает обмотки соленоида реле 34 скорости.
Транспортное средство движется по трассе вдоль ферромагнитного следоуказателя 1. При возможном отклонении, например, вправо полюсный наконечник левого поворота 12 приближается к ферромагнитному следоуказателю 1 и через него и средний полюсный наконечник 14 замыкает магнитный поток источника 9 магнитного поля в магнитопроводе б, в котором срабатывает магниточувствительный датчик левого поворота 3 и своими нормально открытыми контактами 18 ставит под ток обмотки 16 исполнительного реле, последнее размыкает свои нормально закрытые контакты 26 и обесточивает обмотки соленоида 22 левого поворота, который отпускает тормоз левой гусеницы (не показана) транспортного средства 2. Левая гусеница затормаживается и транспортное средство 2 делает некоторый разворот. Полюсный наконечниу левого поворота 12 отходит влево от ферромагнитного следоуказателя 1, увеличивая зазор с ним, магнитная цепь 8 в магнитоприводе б разрывается, и магниточувствительный датчик левого поворота 3 отпускает свои нормально открытые контакты 18 и разрывает цепь питания обмоток 16 исполнительного реле, которое своими нормально закрытыми контактами 26 ставит под ток обмотки соленоида 22 левого поворота. Последний растормаживает гусеницу транспорт.ного средства 2 и оно продолжает движение. Постоянно притормаживая левую гусеницу транспортное средство 2 осуществляет движение, не пересекая ферромагнитный следоуказатель 1.
При левом повороте транспортное средство 2 описанным образом выполня ет правый поворот.
Таким образом/ iftiaHcnopTHoe средство 2 постоянно удерживает ферромагнитный следоуказатель 1 между полюсными наконечниками левого 12
0 и правого 13 поворота, выдерживая движение по нему. При этом параллельное смещение транспортного средства относительно ферромагнитного следоуказателя 1 не влияет на качество
5 управления, так как полюсный допспнительный средний наконечник 38 и средний полюсный наконечник 14 по параллели через любой из полюсных наконечников левого 12 и правого 13
0 поворота не теряют контакта с ферромагнитным следоуказателем 1 и обеспечивают магнитный поток в магнитопроводе 8, удерживая под работой магниточувствительный датчик 5 прямого
5 движения, который своими нормально открытыми контактами держит под то-ком обмотки 15 исполнительного реле, а последний своими нормально открытыми контактами 21 обеспечивает пи0тание всей электросхемьл. Не оказывает влияния на качество управления и возможность положения ферромагнитного следоуказателя 1 под углом
45
так как и в этом случае ферро5
магнитный следоуказатель 1 не теряет контакта с средним полюсным наконечником 14 и дополнительным средним полюсным наконечником 38 до прибли- женин к нему одного из полюсных наконечников левого 12 или правого 13
0 поворота.
Если транспортное средство 2 сойдет с ферромагнитного следоуказателя 1 или последний окажется обор5ванным, разрывается магнитный поток между дополнительным средним полюсным наконечником 38 и средним полюсным наконечником 12 в магнитопроводе 8, в цепи которого выключа0ется обмотка магниточувствительного датчика 5 прямого движения, который своими нормально открытыми контактами 20 обрывает цепь питания обмотки 16 исполнительного реле, а последний
5 своими нормально открытыми контактами 21 разрывает цепь питания всей схемы управления. В схеме обесточенные обмотки соленоидов левого 22 и правого 23 поворота затормаживают
0 обе гусеницы (не показаны), обесточенные обмотки соленоидов реле 33 .газа и скорости 34 убирают газ и выключают муфту сцепления (не показана) транспортное средство оста5навливается.
При аварийности электросистемы транспортного, средства 2 последнее останавливается так как обесточивается вся схема электропитания.
На предусмотренных местах остановок транспортное средство 2 находит на поперечные следоуказатели 3.7 своими полюсными наконечниками левого 12 и правого 13 поворота и обеспечивая магнитный поток в магнитопроводах б и 7, в которых срабатывают магниточувствительные датчики левого 3 и правого 4 поворота. Последние своими нормально открытыми контактами 18 и 19 ставят под ток обмотки 16 и 17 исполнительных реле, а те своими нормально закрытыми контактами 26 и 27 обесточивают обмотки соленоидов левого и правого поворота 22 и 23, затормаживая и левую и правую гусеницы, нормально закрытыми контактами 31 и 32 обесточиваются обмотки реле газа 28 и ско- рости 29, которые отпускают свой якорь и размыкают свои нормально закрытые контакты 35 и 36 реле газа и реле скорости, обесточивают соленоиды реле газа 33 и реле скорости 34, в результате чего отключается
питание и муфта сцепления. Транспортное средство 2 останавливается по своему тормозному пути на расстоянии, которое соответствует раэложент ным поперечным следоуказателям 37. Одновременно нормально открытыми контактами 40 становится под ток обмотка реле 39 времени. Обмотка реле 39 времени отрабатывает заданное время стоянки, срабатывает и нормально открытыми контактами 24 и 25 ставит под ток обмотки соленоидов левого 22 и правого 23 поворота. Таким образом транспортное средство, нормально открытыми контактами 30 ставят под ток обмотки реле газа 28 и скорости 29, которые включают подачутоплива и скорость, и транспортное средство 2 продолжает движение.
, Таким образом, изобретение обеспечивает упрощение конструкснижение металлоемкости,
ции.
возможность остановки транспортного средства в пределах тормозного пути, повышение надежности и возможность временных промежуточных остановок.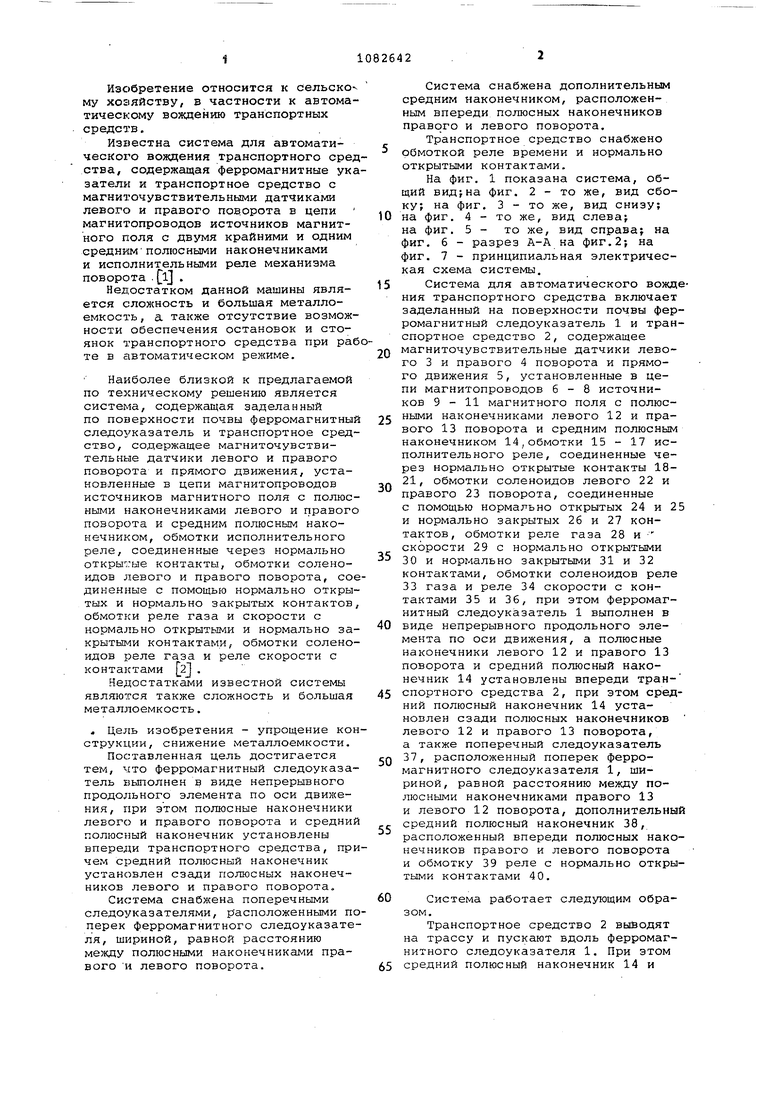
1. СИСТЕМА ДЛЯ АВТОМАТИЧЕСКОГО ВОЖДЕНИЯ ТРАНСПОРТНОГО СРЕДСТВА, содержащая заделанный по поверхности почвы ферромагнитный следоуказатель и транспортное средство, содержащее магниточувствительные датчики левого, правого поворота и прямого движения, установленные в цепи магнитопроводов источников магнитного поля с полюсными наконечниками левого и правого поворота и средним полюсным наконечником, обмотки исполнительного реле, соединенные через нормально открытые контакты, Обмотки -соленоидов левого и правого поворота, соединенные с помощью нормально открытых, и нормально закрытых контактов, обмотки реле газа и скорости с нормально открытыми и нормально закрытыми / ,j контактами, обмотки соленоидов реле газа и реле скорости с контактами, отличающаяся .ем, что, с целью упрощения конструкциии снижения металлоемкости, ферромагнитный следоуказатель выполнен в виде непрерывного продольного элемента по оси движения, при этом полюсные наконечники левого и правого поворота и средний полюсный наконечник установлены впереди транспортного средства, причем средний полюсный наконечник установлен сзади полюсных наконечников левого и правого поворота. 2.Система по п. 1, отлича-.(; ю щ а я с я тем, что система снаб- И жена поперечными следоуказателями, (Л расположенными поперек ферромагнитного следоуказателя, шириной, равной расстоянию между полюсными наконечниками правого и левого поворота. 3.Система по п. 1, отличающаяся тем, что система снабжена дополнительным средним полюсным наконечником, расположенным впереди полюсных наконечников правого и левого поворота. 4.Система по п. 2, отличающаяся тем, что транспортное средство снабжено обмоткой реле времени с нормально открытыми контактами.
VU.1
Фиг. 2 пч ... I (PUi.ff
7 Ю 11 89 Ч 1/ /
жЖш
ч //
X
7J 10 7 I / Л W V
А-/
v
12
п
Фиг.6 8 3 6 { / 3 Фиг. 5
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Способ получения 7 -/д-2-амино-2-(низ-ший АлКилСульфОНилАМиНОфЕНил)-АцЕТилАМиНО/- 3-МЕТОКСи (или ХлОР)-3цЕфЕМ-4-КАРбОНОВыХКиСлОТ или иХ СОлЕй | 1977 |
|
SU803862A3 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| УСТРОЙСТВО ДЛЯ АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ ДВИЖЕНИЕМ ТРАНСПОРТНОГО СРЕДСТВА | 0 |
|
SU344809A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
