Изобретение относится.к сельскому хозяйству, в частности к автоматическому вождению сельскохозяйственных агрегатов.
Известна автоматическая система, обеспечивающая вождение агрегата по траектории следа 1.
Недостатками этой системы являются большая металлоемкость и трудоемкость предварительных операций.
Наиболее близкой к предлагаемой является система для автоматического вождения сельскохозяйственного агрегата, включающая сельскохозяйственный агрегат, ферромагнитный следоуказатель, раму, магниточувствнтельные датчики левого, правого поворота и движения, полюсные наконечники левого, правого поворота, движения и общий, источники магнитного поля, цепь магнитопроводов, нормально-открытые и нормально-закрытые контакты, обмотки исполнительного реле, исполнительного реле магниточувствительных датчиков левого и правого поворота, соленоидов магниточувствительных датчиков левого и правого поворота, реле газа, реле скорости, соленоидов реле газа и реле скорости и рещетку 2.
Недостатками известного устройства являются большая металлоёмкость и трудоемкость работ при прокладке ферромагнитных следоуказателей.
Цель изобретения - снижение металлоемкости и трудоемкости работ при прокладке ферромагнитных следоуказателей.
Поставленная цель достигается тем, что в системе для автоматического вождения сельскохозяйственного агрегата ферромагнитный следоуказатель выполнен в виде гибкого провода, при этом система снабжена сматывающим и разматывающим его колесами, барабанами, на которых запрессованы концы гибкого провода, фрикционной муфтой, связывающей, между собой барабаны, системой роликов и датчиком контроля обрыва ферромагнитного следоуказателя.
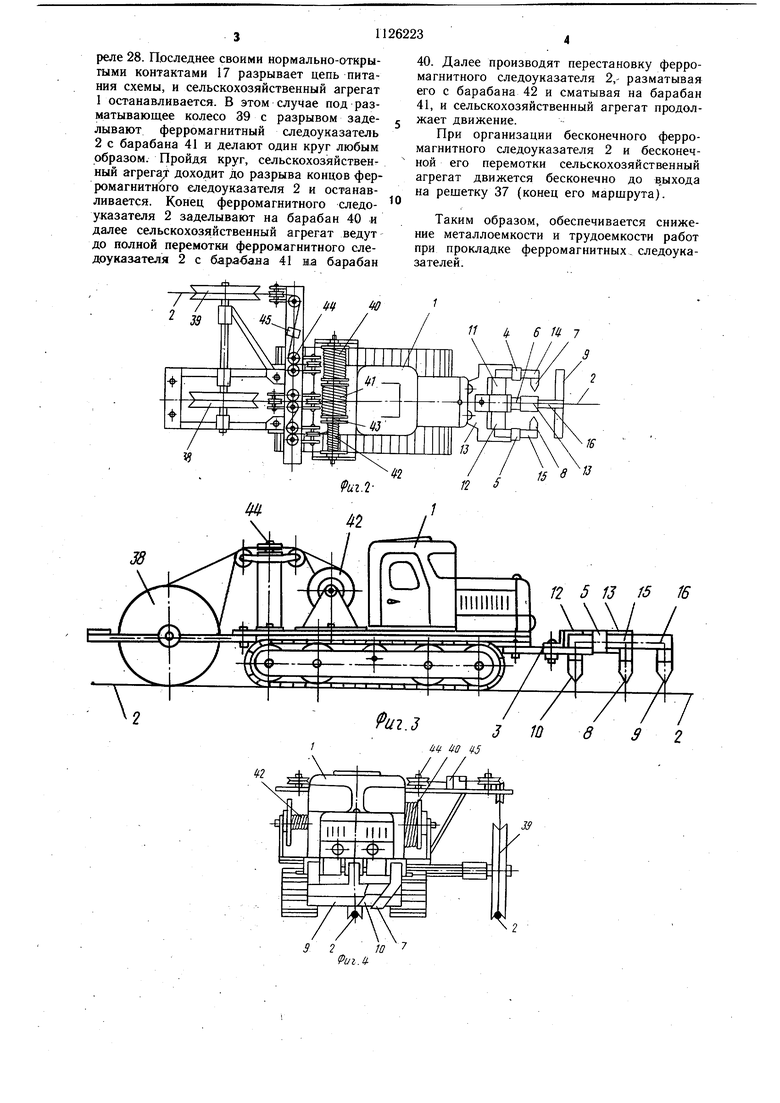
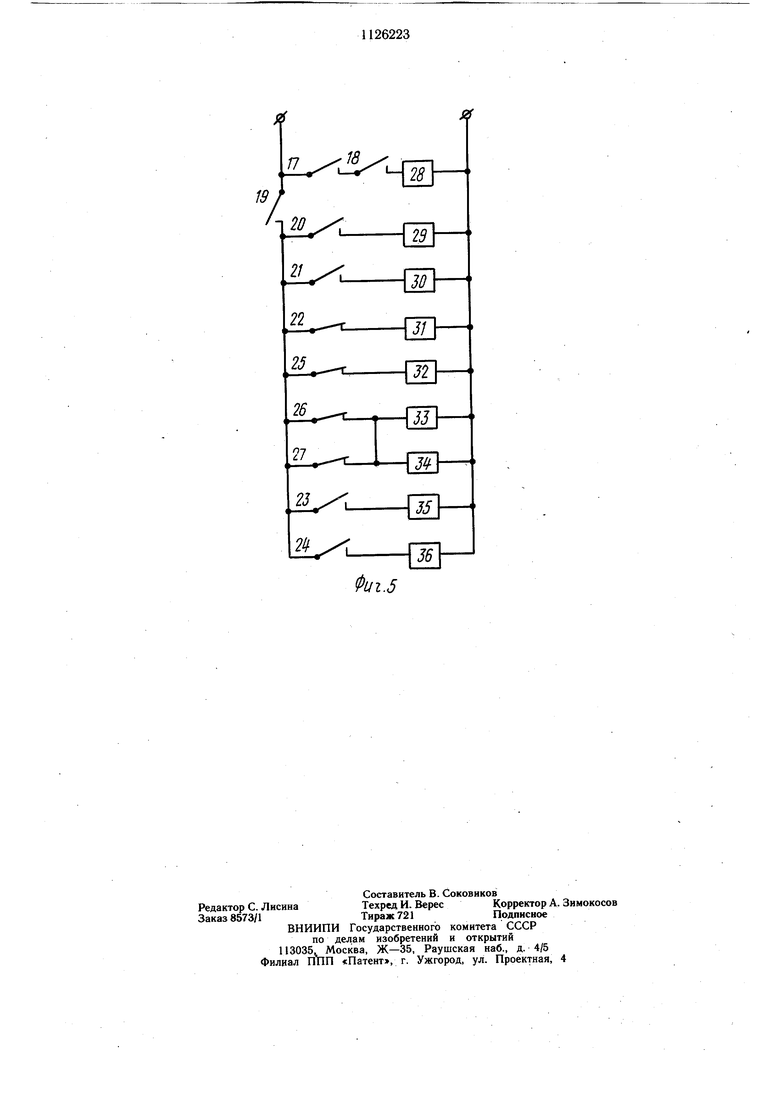
На фиг. 1 показана проекция движения агрегата, план; на фиг. 2 - предлагаемая система, вид сверху; на фиг. 3 - то же, вид сбоку; на фиг. 4 - то же, .вид спереди; на фиг. 5 - принципиальная электрическая схема системы.
Система для автоматического вождения сельскохозяйственного агрегата включает сельскохозяйственный агрегат 1, ферромагнитный следоуказатель 2, раму 3, магниточувствительные датчики левого 4, правого 5 поворота и движения 6, полюсные наконечники левого 7, правого 8 поворота, движения 9 и общий 10, источники 11 -13 магнитного поля, цепь магнитопроводов 14-16, нормально-открытые 17-24 и нормально-закрытые 25-27 контакты, обмотки исполнительного реле 28, исполнительного реле магниточувствительных датчиков левого 29 и правого 30 поворота, соленоидов магниточувствительных датчиков левого 31 и право-, го 32 поворота, реле 33 газа, реле 34 скорости, соленоидов 35 и 36 реле газа и реле скорости соответственно и рещетку 37, причем ферромагнитный следоуказатель 2 выполнен в виде гибкого провода, а также сматывающее 38 и разматывающее 39 его колеса, барабаны 40-42, на которых запрессованы концы гибкого провода, фрикционную муфту 43, связывающую между собой барабаны, систему роликов 44 и датчики 45 контроля обрыва фероомагнитного следоуказателя 2.,
Система работает следующим образом.
Сельскохозяйственный агрегат 1 проводят по замкнутому марщруту и по оси движения наводят на уложенный на почве конец ферромагнитного следоуказателя 2. Сельскохозяйственный агрегат 1 останавливают, конец ферромагнитного следоуказателя 2 пропускают под сматывающее колесо 38 и через систему роликов 44 запасовывают на барабан 42. Включают систему и пускают сельскохозяйственный агрегат 1 по ферромагнитному следоуказателю 2. После чего он, описывая круг за кругом по ширине своего захвата, каждый круг разматывает разматывающим колесом 39 с барабана 40 ферромагнитный следоуказатель 2. Этим самым барабан 40 через фрикционную муфту 43 приводит во вращение барабаны 41 и 42, последний из которых через сматывающее колесо 38 сматывает ферромагнитный следоуказатель 2 за сельскохозяйственным агрегатом 1. При этом на поворотах, если разматывающее колесо 39 описывает больший радиус, по которому разматывается ферромагнитный следоуказатель 2, а сматывающее колесо 38 описывает меньший радиус, то разница пути компенсируется отставанием барабана 42 от барабана 40 за счет проскальзывания фрикционной муфты 43. Барабан 42 сматывает соответствующую длину ферромагнитного следоуказателя 2 и удерживает его в натяжении. Это. в совокупности с определенной формой сматывающего колеса 38, центрирует ферромагнитный следоуказатель 2 при некоторых смещениях на поворотах. В отдельных случаях сматывающее колесо 38 может быть выполнено соответствующей ширины илн снабжено центрирующим устройством ферромагнитного следоуказателя 2.
В случае полной размотки ферромагнитного следоуказателя 2 с барабана 40 датчик 45 контроля отрыва ферромагнитного следоуказателя освобождается от ферромагнитного следоуказателя 2 и размыкает свои нормально-открытые контакты 18, чем обесточивает обмотки исполнительного
реле 28. Последнее своими нормально-открытыми контактами 17 разрывает цепь питания схемы, и сельскохозяйственный агрегат
1останавливается. В этом случае под разматывающее колесо 39 с разрывом заделывают ферромагнитный следоуказатель
2с барабана 41 и делают один круг любым образом. Пройдя круг, сельскохозяйственный arperaj доходит до разрыва концов ферромагнитного следоуказателя 2 и останавливается. Конец ферромагнитного следоуказателя 2 заделывают на барабан 40 и далее сельскохозяйственный агрегат ведут
до полной перемотки ферромагнитного следоуказателя 2 с барабана 41 ш.а барабан 5 210
40.Далее производят перестановку ферромагнитного следоуказателя 2,- разматывая его с барабана 42 и сматывая на барабан
41,и сельскохозяйственный агрегат продолжает движение.
При организации бесконечного ферромагнитного следоуказателя 2 и бесконечной его перемотки сельскохозяйственный агрегат движется бесконечно до в ыхода на решетку 37 (конец его маршрута).
Таким образом, обеспечивается снижение металлоемкости и трудоемкости работ при прокладке ферромагнитных, следоуказателей. 1 If. 6 т 7 12 5 13 15 16 / /
Фиг.б
СИСТЕМА ДЛЯ АВТОМАТИЧЕСКОГО ВОЖДЕНИЯ СЕЛЬСКОХОЗЯЙСТВЕННОГО АГРЕГАТА, содержащая сельскохозяйственный агрегат, ферромагнитный следоуказатель, раму, магниточувствительные датчики левого, правого поворота и движения, полюсные наконечники левого. правого поворота, движения и общий, источники магнитного поля, цепь магнитопроводов, нормально-открытые и нормально-закрытые контакты, обмотки исполнительного реле, исполнительного реле магниточувствительных датчиков левого и правого поворота, соленоидов магниточувствительных датчиков левого и правого поворота, реле газа, реле скорости, соленоидов реле газа и реле скорости и рещетку, отличающаяся тем, что, с целью снижения металлоемкости и трудоемкости работ при прокладке ферромагнитных следоуказателей, ферромагнитный следоуказатель выполнен в виде гибкого провода, при этом система снабжена сматывающим и разматывающим его колесами, барабанами, на которых запрессованы конI цы гибкого провода, фрикционной муфтой, связывающей между собой барабаны, сис(Л темой роликов и датчиков контроля обрыва ферромагнитного следоуказателя. to а to : GO
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| АКТИВАТОРЫ ИЗОИНДОЛИН-1-ОН-ГЛЮКОКИНАЗЫ | 2001 |
|
RU2249590C2 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Авторское свидетельство СССР по заявке № 3483920/30-15, кл | |||
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
