Изобретение относится к сельскому, хозяйству, в частности к автоматическому вождению сельскохозяйственных агрегатов.
Известна автоматическая система, обеспечивающая вождение по траектории еледа 1.
Недостатками такой системь являются большая металлоемкость и трудоем} ость предварительных операций.
Наиболее близкой по технической сущности к изобретению является система, включающая сельскохозяйственный агрегат с механизмом рулевого управления, содержащим кронщтейн, магниточувствительные датчики левого и правого поворота, магнитопровод с правым и левым магнитами, левым, средним и правым полюсными наконечниками, электрический источник питания, гидрораспределитель с золотником, управляемым соленоидами, нормально открытУе контакты и ферромагнитные следоуказатели 2.
Недостатками известной системы являются большая металлоемкость и трудоемкость работы при укладке ферромагнитных следоуказателей.
Цель изобретения - снижение трудоемкости при укладке ферромагнитных следоуказателей и их металлоемкости.
Поставленная цель достигается тем, что в системе автоматического вождения сельскохозяйственного агрегата по спиральной траектории ферромагнитные следоуказатели выполнены в виде отрезков, расположенных симметрично относительно центра движения и имеющих длину, равную щирине агрегата, а система снабжена горизонтальным и вертикальным магнитными захватами и механизмом параллельного перемещения ферромагнитного следоуказателя, при этом горизонтальный магнитный захват имеет магниточувствительный датчик и магнитопровод с электрообмоткой, механизм параллельного перемещения ферромагнитного следоуказателя содержит щток с лапой, горизонтальный соленоид и магнитопровод с электрообмоткой, а вертикальный магнитный захват имеет магниточувствительный датчик, вертикальный соленоид со штоком и лапой, соединенной с упором, контактирующим с верхним и нижним концевыми выключателями.
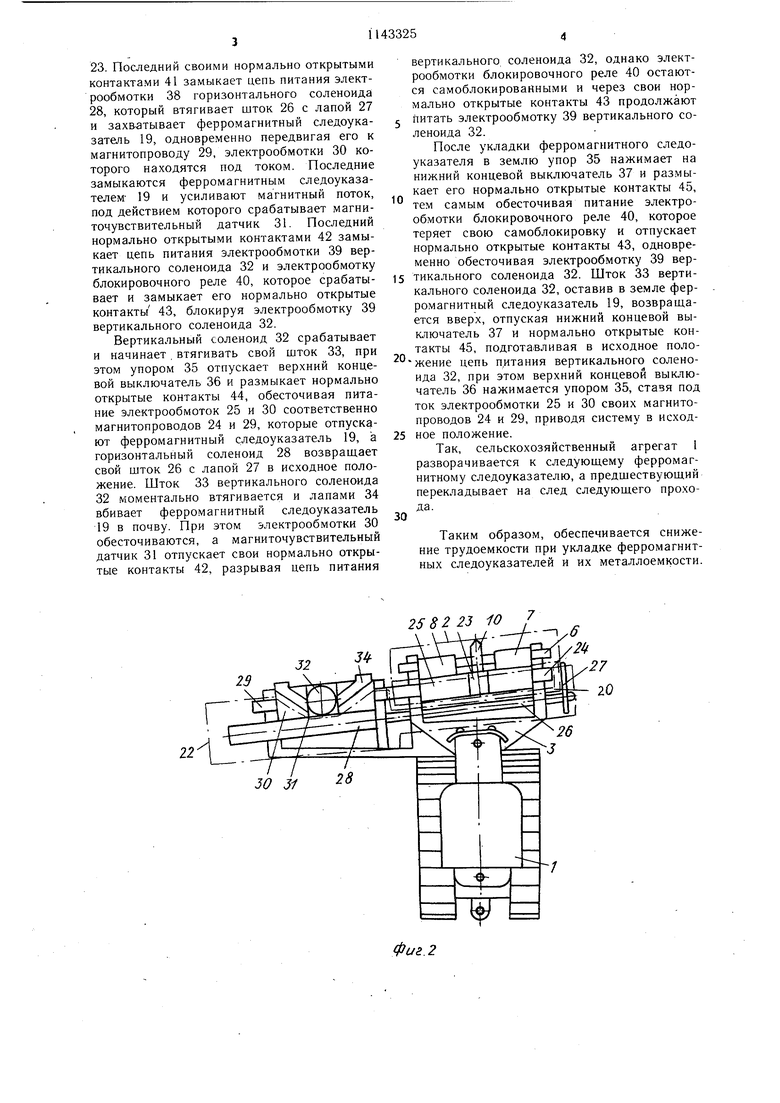
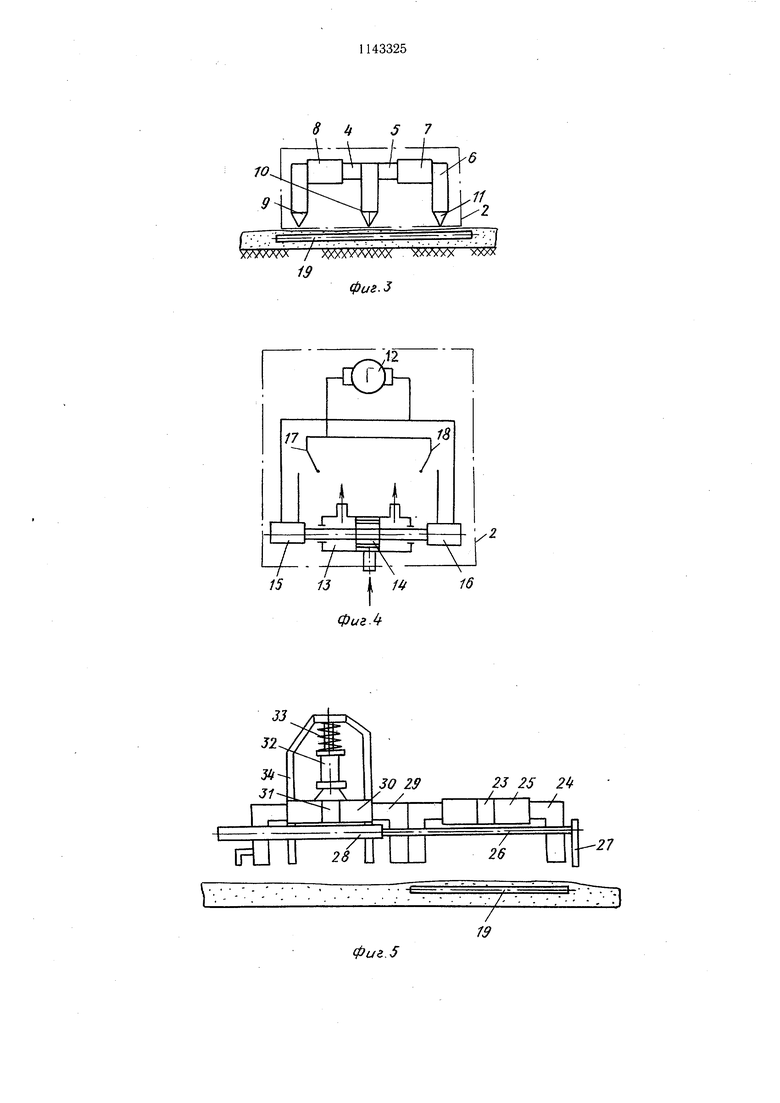
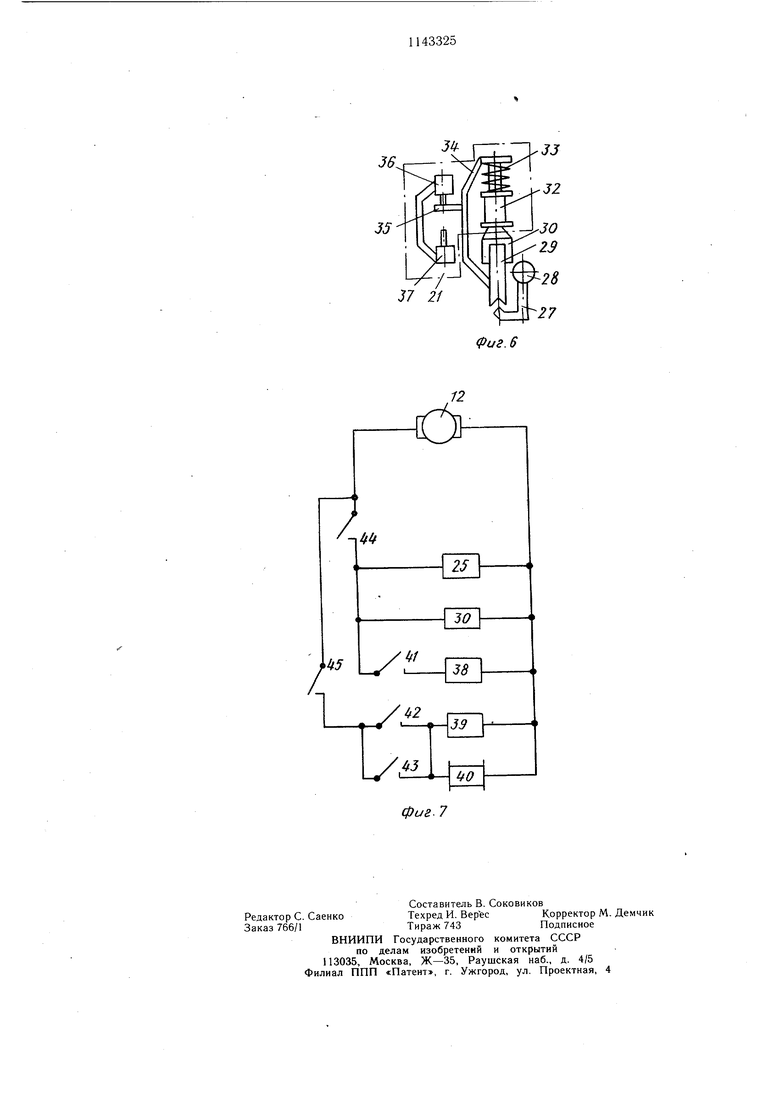
На фиг. 1 показан маршрут движения сельскохозяйственного агрегата, план; на фиг. 2 - сельскохозяйственный агрегат с системой для автоматического вождения, вид сверху; на фиг. 3 - механизм рулевого управления, вид сзади; на фиг. 4 - управление гидрораспределителя; на фиг. 5 - горизонтальный и вертикальный магнитные захваты, а также механизм параллельного размещения ферромагнитного следоуказателя, вид сзади; на фиг. 6 - вертикальный
магнитный захват, вид сбоку; на фиг. 7 - принципиальная электрическая схема горизонтального, вертикального магнитных захватов и механизма параллельного перемещения ферромагнитного следоуказателя.
Система автом,атического вождения сельскохозяйственного агрегата по спиральной траектории включает сельскохозяйственный агрегат 1 с механизмом 2 рулевого управления, содержащим кронщтейн 3, магниточувствительные датчики левого 4 и правого 5 поворота, магнитопровод 6 с правым 7 и левым 8 магнитами, левым 9, средним 10 и правым 11 полюсными наконечниками, электрический источник 12 питания, гидрораспределитель 13 с золотником 14, управляемым соленоидами 15 и 16, нормально-открытые контакты 17 и 18, и ферромагнитные следоуказатели 19, выполненные в виде отрезков, расположенных симметрично относительно центра движения и имеющих длину, равную ширине агрегата, а также горизонтальный 20 и вертикальный 21 магнитные захваты и механизм 22 параллельного перемещения ферромагнитного 5 следоуказателя 19, при этом горизонтальный магнитный захват 20 имеет магниточувствительный датчик 23, магнито.провод 24 с электрообмоткой 25, механизм 22 параллельного перемещения ферромагнитного следоуказателя 19 содержит шток 26 с лапой 27, горизонтальный соленоид 28, магнитопровод 29 с электрообмоткой 30, а вертикальный магнитный захват 21 имеет .магниточувствительный датчик 31, вертикальный соленоид 32 со штоком 33 и лапой 34, соединенной с упором 35, контактирующим с верхним 36 и нижним 37 концевыми выключателями, кроме того, электрообмотки 38 и 39 соответственно горизонтального 28 и вертикального 32 соленоидов и электрообмотки блокировочного реле 40, соединенные последовательно нормально открытыми контактами 41-43 и параллельно нормально открытыми контактами 44 и 45 верхнего 36 и нижнего 37 концевых выключателей.
Система работает следующим образом. Сельскохозяйственный агрегат выводят на обрабатываемый участок и пускают примерно поперек ферромагнитному следоуказателю 19. Несколькими импульсами поворотов сельскохозяйственный агрегат 1 устанавливает такой угол поворота, при котором выходит на пересечение с этим ферромагнитным следоуказателем. Тогда над ним проходит магнитопровод 24, который под действием электромагнитных сил электрог обмотки 25 отрывает от земли, притягивает ферромагнитный следоуказатель 19 через магнитопровод 24 и усиливает магнитный силовой поток, под действием которого срабатывает магниточувствительный датчик
23. Последний своими нормально открытыми контактами 41 замыкает цепь питания электрообмотки 38 горизонтального соленоида 28, который втягивает шток 26 с лапой 27 и захватывает ферромагнитный следоуказатель 19, одновременно передвигая его к магнитопроводу 29, электрообмотки 30 которого находятся под током. Последние замыкаются ферромагнитным следоуказателем- 19 и усиливают магнитный поток, под действием которого срабатывает магниточувствительный датчик 31. Последний нормально открытыми контактами 42 замыкает цепь питания электрообмотки 39 вертикального соленоида 32 и электрообмотку блокировочного реле 40, которое срабатывает и замыкает его нормально открытые контакты 43, блокируя электрообмотку 39 вертикального соленоида 32.
Вертикальный соленоид 32 срабатывает и начинает,втягивать свой шток 33, при этом упором 35 отпускает верхний концевой выключатель 36 и размыкает нормально открытые контакты 44, обесточивая питание электрообмоток 25 и 30 соответственно магнитопроводов 24 и 29, которые отпускают ферромагнитный следоуказатель 19, а горизонтальный соленоид 28 возвраш,ает свой шток 26 с лапой 27 в исходное положение. Шток 33 вертикального соленоида 32 моментально втягивается и лапами 34 вбивает ферромагнитный следоуказатель 19 в почву. При этом электрообмотки 30 обесточиваются, а магниточувствительный датчик 31 отпускает свои нормально открытые контакты 42, разрывая цепь питания
вертикального соленоида 32, однако электрообмотки блокировочного реле 40 остаются самоблокированными и через свои нормально открытые контакты 43 продолжают питать электрообмотку 39 вертикального соленоида 32.
После укладки ферромагнитного следоуказателя в землю упор 35 нажимает на нижний концевой выключатель 37 и размыкает его нормально открытые контакты 45,
0 тем самым обесточивая питание электрообмотки блокировочного реле 40, которое теряет свою самоблокировку и отпускает нормально открытые контакты 43, одновременно обесточивая электрообмотку 39 вертикального соленоида 32. Шток 33 вертикального соленоида 32, оставив в земле ферромагнитный следоуказатель 19, возвращается вверх, отпуская нижний концевой выключатель 37 и нормально открытые контакты 45, подготавливая в исходное поло0жение цепь питания вертикального соленоида 32, при этом верхний концевой выключатель 36 нажимается упором 35, ставя под ток электрообмотки 25 и 30 своих магнитопроводов 24 и 29, приводя систему в исход5 ное положение.
Так, сельскохозяйственный агрегат 1 разворачивается к следующему ферромагнитному следоуказателю, а предшествующий перекладывает на след следующего прохода.
0
Таким образом, обеспечивается снижение трудоемкости при укладке ферромагнитных следоуказателей и их металлоемкости.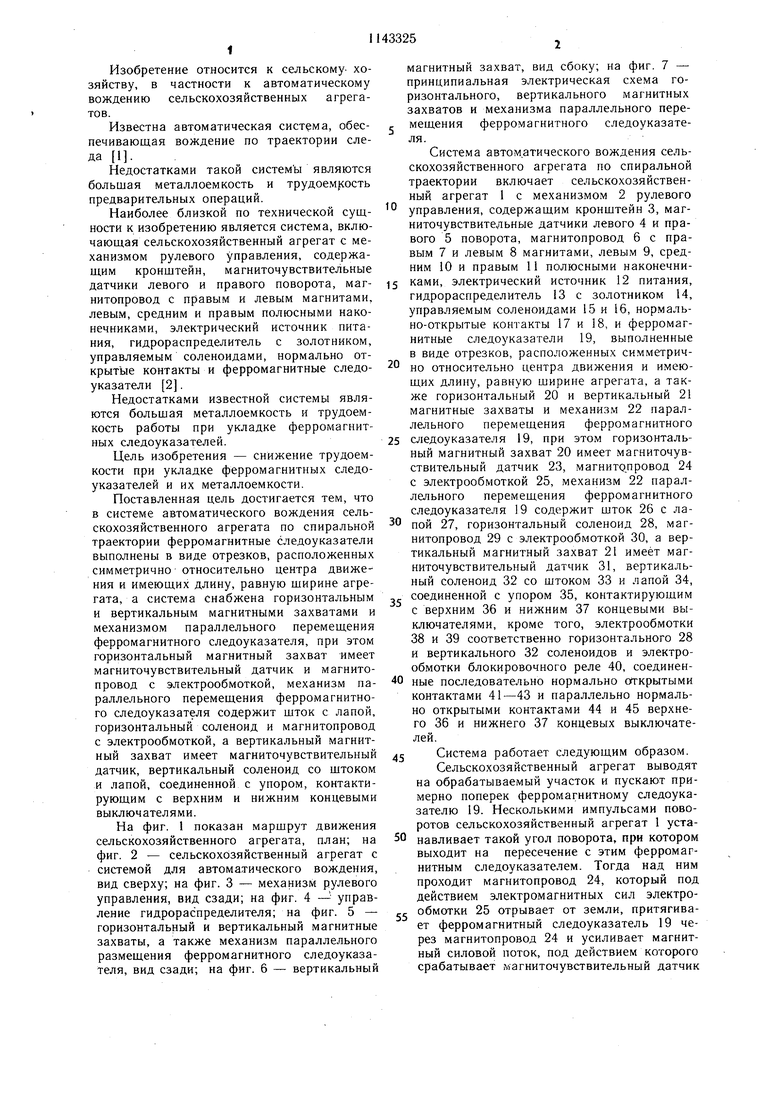
СИСТЕМА АВТОМАТИЧЕСКОГО ВОЖДЕНИЯ СЕЛБСКОХОЗЯЙСТВЕННОГО АГРЕГАТА ПО СПИРАЛЬНОЙ ТРАЕКТОРИИ, содержащая сельскохозяйственный агрегат с механизмом рулевого управ-, ления, имеющим кронштейн, магниточувствительные датчики левого и правого поворота, магнитопровод с правым и левым магнитами, левым, средним и правым полюсными наконечниками, электрический источник питания, гидрораспределитель с золотником, управляемым соленоидами, нормально открытые контакты и ферромагнитные следоуказатели, отличающаяся тем, что, с целью снижения трудоемкости при укладке ферромагнитных следоуказателей и их мета/ лоем кости, ферромагнитные следоуказатели выполнены в виде отрезков, расположенных симметрично относительно центра движения и имеющих длину, равную ширине агрегата, а система снабжена горизонтальным и вертикальным магнитными захватами и механизмом параллельного перемещения ферромагнитного следоуказателя, нри этом горизонтальный магнитный захват имеет магниточувствительный датчик и магнитопровод с электрообмоткой, механизм параллельного перемещения ферромагi нитного следоуказателя содержит шток с лапой, горизонтальный соленоид и магнито(Л провод с электрообмоткой, вертикальный магнитный захват имеет магниточувствительный датчик, вертикальный соленоид со штоком и лапой, соединенной с упором, контактирующим с верхним и нижним концевыми выключателями. N оо 00 ьо СП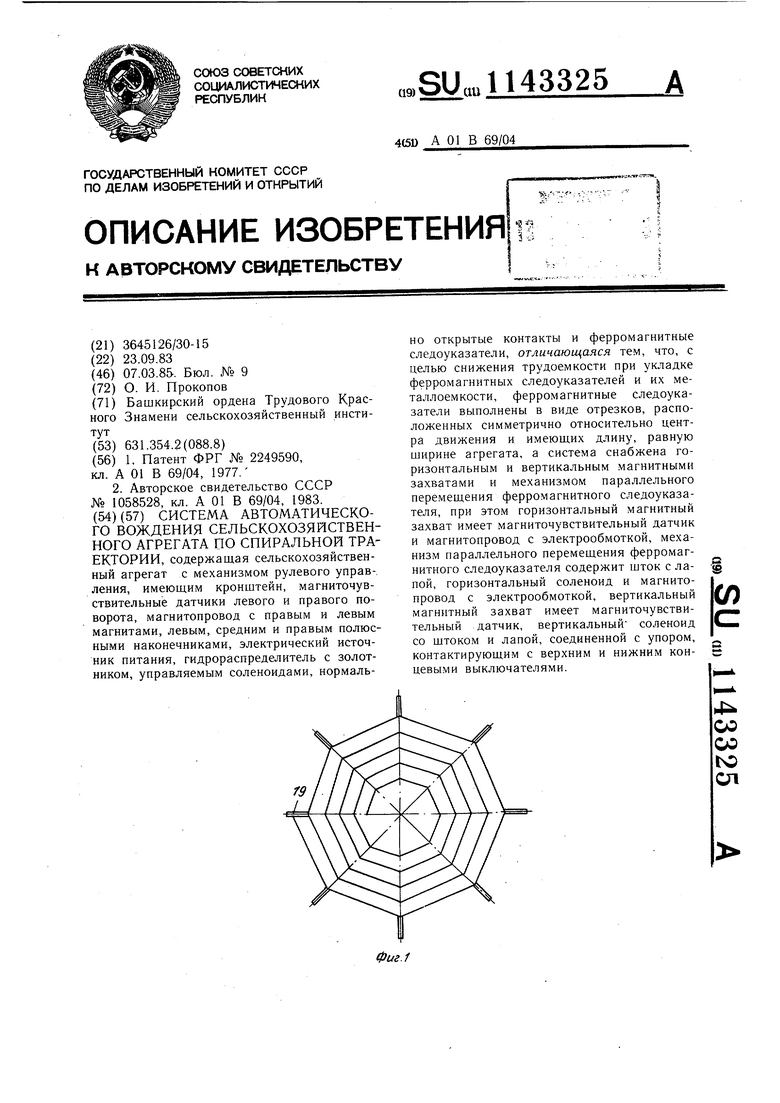
29
Фиг. 2
7
1Э
фи&.5
12
М
L
ifl
U
J
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Система для автоматического вождения сельскохозяйственного агрегата | 1982 |
|
SU1058528A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
