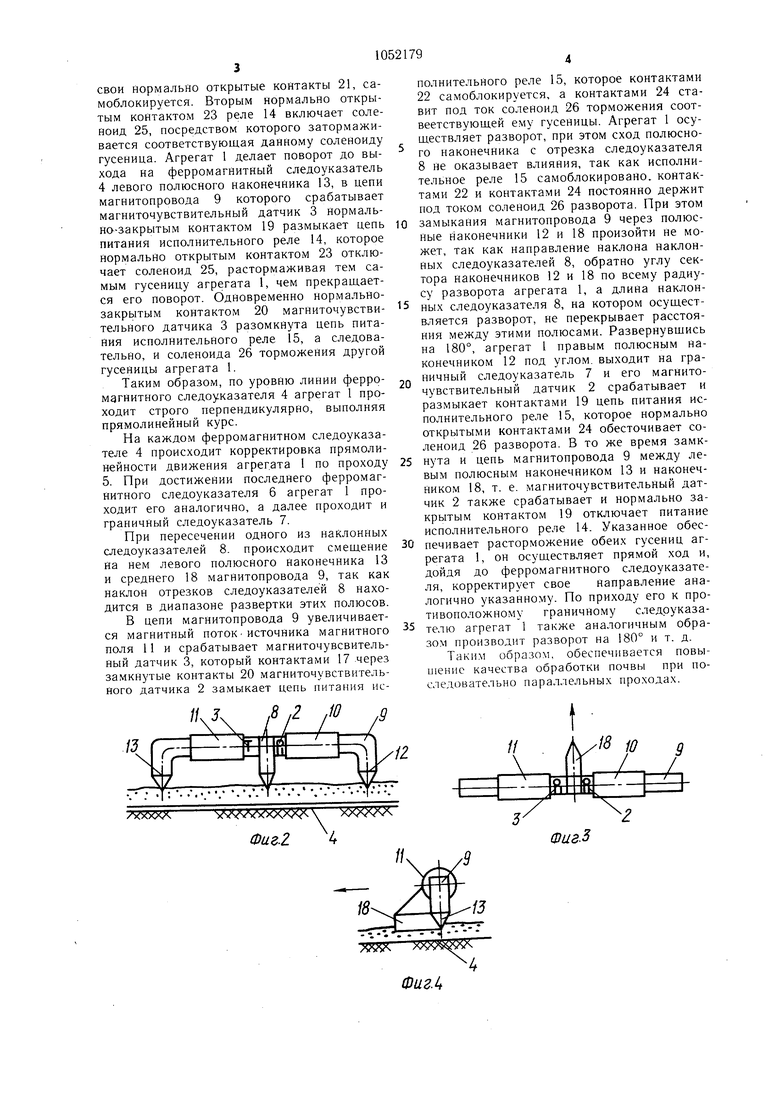
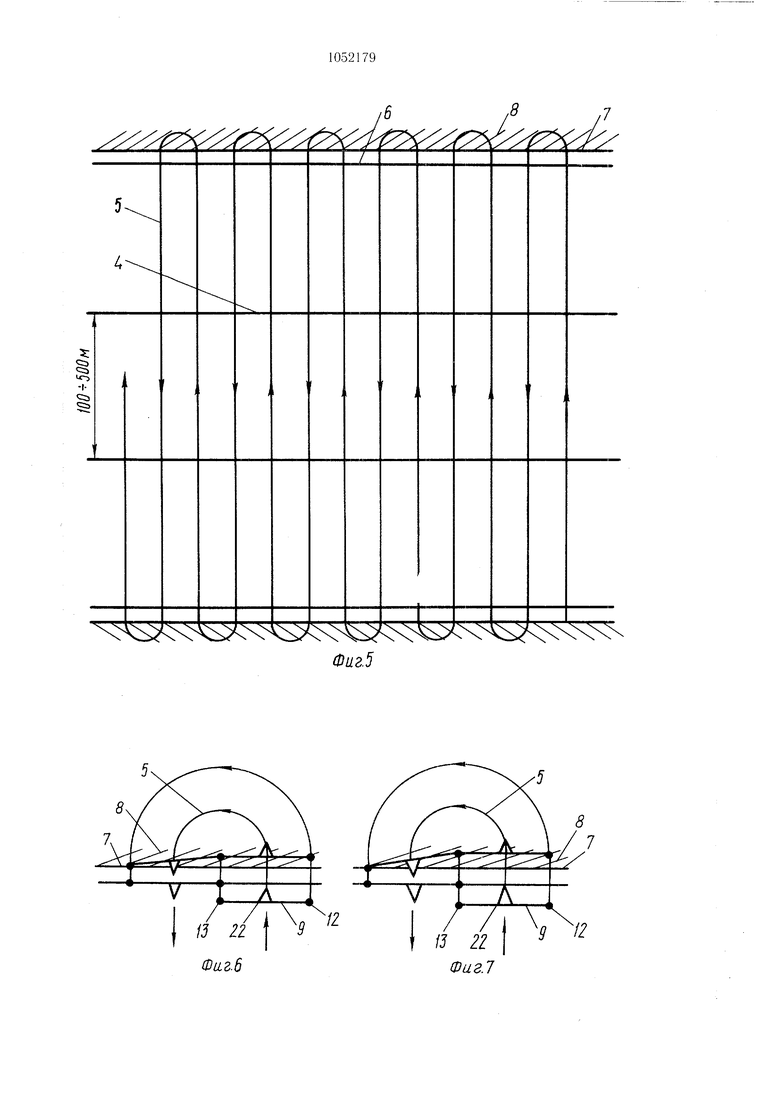
Изобретение относится к сельскому хозяйству и может быть использовано для автоматического вождения сельскохозяйственных агрегатов, например для внесения удобрений и др. Известна система для автоматического вождения сельскохозяйственного агрегата, включающая технические средства, обеспечивающие автоматическое вождение агрегата по траектории следа, борозды или рядка растений 1. Недостатком известного устройства является низкое качество обработки гючвы при последовательно пара.1лельных проходах. Наиболее близким техническим решением к предлагаемому является устройство, включающее заделанные под пахотный слой почвы поперечно движению агрегата ферромагнитные следоуказатели и агрегат, содержащий магниточувствительные датчики левого и правого поворота, установленные на агрегате по сторонам его движения в цепи магнитопроводов источников магнитного поля с двумя крайними и одним средним полюсными наконечниками, и исполнительные реле механизмов поворота 2. Нелостаток данного устройства - низкое качество обработки почвы при последова тельно параллельных проходах. Цель изобретения - повыщение качества обработки почвы при последовательно параллельных проходах Поставленная цель достигается тем, что система снабжена уложенными после последних поперечных ферромагнитных следоуказателей по одному граничному следоуказателю, с наружной стороны которых размещены по ходу движения агрегата наклонные перекрывающие друг друга еледоуказатели, расположенные навстречу развороту агрегата, а в командную цепь каждого магниточувствительного датчика включены обмотки исполнительных реле механизмов поворота с самоблокировкой последовательно с нормально закрытыми контактами соседнего магниточувствительного датчика, причем средний полюсной наконечник выполнен в виде клина, направленного в сторону движения агрегата, при этом расстояние между крайними полюсными наконечниками превышает длину наклонных следоуказателей. На фиг. 1 показано устройство; общий вид; На фиг. 2 - то же, вид сзади; на фиг. 3 - то же, вид сверху; на фиг. 4 - то же, вид в плане; на фиг. 5 - траектория движения агрегата; на фиг. 6 - первый вариант разворота агрегата; на фиг. 7 второй вариант разворота агрегата; на фиг. 8 - промежуточное положение агрегата по первому варианту разворота; на фиг. 9 - промежуточное положение агрегата по второму варианту разворота; на фиг. 10 - принципиальная электрическая схема устройства. Устройство для автоматического вождения сельскохозяйственного агрегата 1 включает магниточувствительные датчики 2 и 3, взаимодействующие с ферромагнитными следоуказателями 4, заделанными поперечно движению под пахотный слой, при этом для обеспечения последовательных парал.лельных проходов 5 после последних поперечных следоуказателей б рядом с ними параллельно заложены по одному граничному с:1едоуказателю 7, с наружной стороны которых размещены по ходу движения агрегата наклонные перекрывающие один другой следоуказатели 8 навстречу развороту агрегата 1. Для обеспечения работы устройства магниточувстительные датчики 2 и 3 левого и правого поворота установлены на агрегате 1 по сторонам его движения в цепи магнитопровода 9 источников магнитного поля 10 и 11 с полюсными наконечниками 12 и 13, при этом в командную цепь каждого магниточувствительного датчика 2 и 3 включены обмотки исполнительных реле 14 и 15 механизмов поворота с самоблокировкой последовательно с нормально-открытыми контактами 16 и 17 соседнего магниточувствительного датчика, а средний полюсной наконечник 18 выполнен в виде клина в сторону движения, при этом магниточувствительные датчики 2 и 3 с нормально закрытыми контактами 19 и 20 включены в цепи питания соседних обмоток исполнительных реле 14 и 15. Нормально-закрытые контакты 16 и 17 магниточувствительных датчиков 2 и 3 запараллелены нормально-открытыми контактами 21 и 22 собственных исполнительных реле 14 и 15, а также в их параллельные контакты 23 и 24 включены соленоиды 25 и 26. Устройство работает следующим образом. Агрегат 1 выводят на поле и пускают поперек путевых следоуказателей 4. При возможном отклонении агрегата 1 от прямолинейного движения по проходу 5, т. е под углом к ферромагнитным следоуказателям 4, вперед отклонившийся полюсной наконечник, например правый 12, находит на ферромагнитный следователь 4, в это же время на следоуказателе 4 нахо.аится средний полюсной наконечник .18. Магнитная цепь источника магнитного поля 10 через полюсные наконечники 12 и 18 и ферромагнитный следоуказатель 4 замыкается, и в магнитопроводе 9 увеличивается магнитный поток, на который срабат.1вает магниточувствительный датчик 2 и нопмаль.чо открытым контактом 16 замыкает цепь iniтания обмотки исполнительного реле 14 через нормально замкнутый контакт 19, магниточувствительного датчика 3 и, замыкая свои нормально открытые контакты 21, самоблокируется. Вторым нормально открытым контактом 23 реле 14 включает соленоид 25, посредством которого затормаживается соответствующая данному соленоиду гусеница. Агрегат 1 делает поворот до выхода на ферромагнитный следоуказатель 4 левого полюсного наконечника 13, в цепи магнитопровода 9 которого срабатывает магниточувствительный датчик 3 нормально-закрытым контактом 19 размыкает цепь питания исполнительного реле 14, которое нормально открытым контактом 23 отключает соленоид 25, растормаживая тем самым гусеницу агрегата 1, чем прекращается его поворот. Одновременно нормальнозакрытым контактом 20 магниточувствительного датчика 3 разомкнута цепь питания исполнительного реле 15, а следовательно, и соленоида 26 торможения другой гусеницы агрегата 1. Таким образом, по уровню линии ферромагнитного следоуказателя 4 агрегат 1 проходит строго перпендикулярно, выполняя прямолинейный курс. На каждом ферромагнитном следоуказателе 4 происходит корректировка прямолинейности движения агрегата 1 по проходу 5. При достижении последнего ферромагнитного следоуказателя 6 агрегат 1 проходит его аналогично, а далее проходит и граничный следоуказатель 7. При пересечении одного из наклонных следоуказателей 8. происходит смещение На нем левого полюсного наконечника 13 и среднего 18 магнитопровода 9, так как наклон отрезков следоуказателей 8 находится в диапазоне развертки этих полюсов. В цепи магнитопровода 9 увеличивается магнитный ПОТОКисточника магнитного поля 11 и срабатывает магниточувсвительный датчик 3, который контактами 17 через замкнутые контакты 20 магниточувствительного датчика 2 замыкает цепь питания исХХХХ Л
Фиг.2.
7557:
Фцг.1 полнительного реле 15, которое контактами 22 самоблокируется, а контактами 24 ставит под ток соленоид 26 торможения соотвеетствующей ему гусеницы. Агрегат 1 осуществляет разворот, при этом сход полюсного наконечника с отрезка следоуказателя 8 не оказывает влияния, так как исполнительное реле 15 самоблокировано, контактами 22 и контактами 24 постоянно держит под током соленоид 26 разворота. При этом замыкания магнитопровода 9 через полюсные наконечники 12 и 18 произойти не может, так как направление наклона наклонных следоуказателей 8, обратно углу сектора наконечников 12 и 18 по всему радиусу разворота агрегата 1, а длина наклонных следоуказателя 8, на котором осуществляется разворот, не перекрывает расстояния между этими полюсами. Развернувщись на 180°, агрегат 1 правым полюсным наконечником 12 под углом, выходит на граничный следоуказатель 7 и его магниточувствительный датчик 2 срабатывает и размыкает контактами 19 цепь питания исполнительного реле 15, которое нормально открытыми контактами 24 обесточивает соленоид 26 разворота. В то же время замкнута и цепь магнитопровода 9 между левым полюсным наконечником 13 и наконечником 18, т. е. магниточувствительный датчик 2 также срабатывает и нормально закрытым контактом 19 отключает питание исполнительного реле 14. Указанное обеспечивает расторможение обеих гусениц агрегата 1, он осуществляет прямой ход и, дойдя до ферромагнитного следоуказателя, корректирует свое направление аналогично указанному. По приходу его к противоположному граничному следоуказателю агрегат 1 также аналогичным образом производит разворот на 180° и т. д. Таким образом, обеспечивается повышенно качества обработки почвы при последовательно параллельных проходах.
г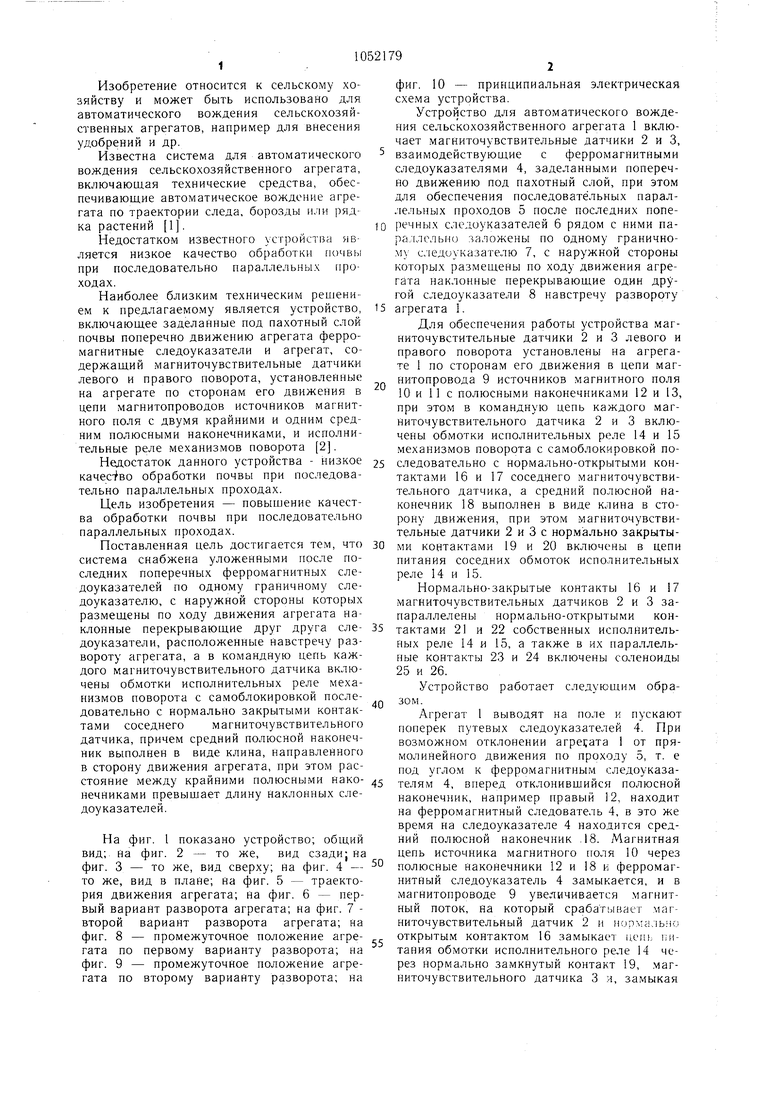
| название | год | авторы | номер документа |
|---|---|---|---|
| Система для автоматического вождения транспортного средства | 1983 |
|
SU1082642A1 |
| ОРОСИТЕЛЬНЫЙ ТРУБОПРОВОД СИСТЕМЫ КАПЕЛЬНОГО ОРОШЕНИЯ, СПОСОБ ВОЖДЕНИЯ СЕЛЬСКОХОЗЯЙСТВЕННОГО АГРЕГАТА НА ПОСАДКАХ ПРИ КАПЕЛЬНОМ ОРОШЕНИИ И СИСТЕМА ДЛЯ АВТОМАТИЧЕСКОГО ВОЖДЕНИЯ СЕЛЬСКОХОЗЯЙСТВЕННОГО АГРЕГАТА | 2004 |
|
RU2275016C1 |
| Система автоматического вождения сельскохозяйственного агрегата по спиральной траектории | 1983 |
|
SU1143325A1 |
| Система для автоматического вождения сельскохозяйственного агрегата | 1982 |
|
SU1058528A1 |
| Система для автоматического вождения сельскохозяйственного агрегата | 1983 |
|
SU1126223A1 |
| СПОСОБ АВТОМАТИЧЕСКОГО ВОЖДЕНИЯ СЕЛЬСКОХОЗЯЙСТВЕННОГО АГРЕГАТА В МЕЖДУРЯДЬЯХ ПРОПАШНЫХ КУЛЬТУР ПРИ КАПЕЛЬНОМ ОРОШЕНИИ | 2003 |
|
RU2273978C2 |
| Способ посева семян кукурузы и агрегат для его осуществления | 1984 |
|
SU1225499A1 |
| Способ посева семян кукурузы | 1979 |
|
SU843811A1 |
| СПОСОБ ПРОПОЛКИ РАСТЕНИЙ ПРОПАШНЫХ СЕЛЬСКОХОЗЯЙСТВЕННЫХ КУЛЬТУР В ЗАЩИТНОЙ ЗОНЕ РЯДКОВ ПРИ КАПЕЛЬНОМ ОРОШЕНИИ | 2005 |
|
RU2299536C1 |
| СПОСОБ ВОЗДЕЛЫВАНИЯ ОВОЩНЫХ КУЛЬТУР, ПРЕИМУЩЕСТВЕННО ТОМАТОВ, ПРИ КАПЕЛЬНОМ ОРОШЕНИИ | 2010 |
|
RU2432728C1 |
СИСТЕМА ДЛЯ АВТОМАТИЧЕСКОГО ВОЖДЕНИЯ СЕЛЬСКОХОЗЯЙСТВЕННОГО АГРЕГАТА, содержащая заделанные под нахотный слой почвы поперечно движению агрегата ферромагнитные следоуказатели и агрегат, содержащий магниточувствительные датчики левого и правого поворота,установленные на агрегате по сторонам его движения в цепи магнитопроводов источников магнитного поля с двумя крайними и одним средним полюсными наконечниками, и исполнительные реле механизмов поворота, отличающаяся тем, что с целью повып1ения качества обработки почвы при последовательно параллельных проходах, она снабжена уложенными после последних поперечных ферромагнитных следоуказателей но одному граничному следоуказателю, с наружней стороны которых размещены по ходу движения агрегата наклонные перекрывающие друг друга следоуказатели, расположенные навстречу развороту агрегата, а в командную цепь каждого магпиточувствительного датчика включены обмотки исполнительных реле механизмов поворота с самоблокировкой последовательно с нормально закрытыми контактами соседнего магниточувствительного датчика, причем средний полюсной накоS нечник выполнен в виде клина, направлен(Л ного в сторону движения агрегата, при этом расстояние между крайними полюсными нас конечниками превыщает длину наклонных следоуказателей. ел ьо со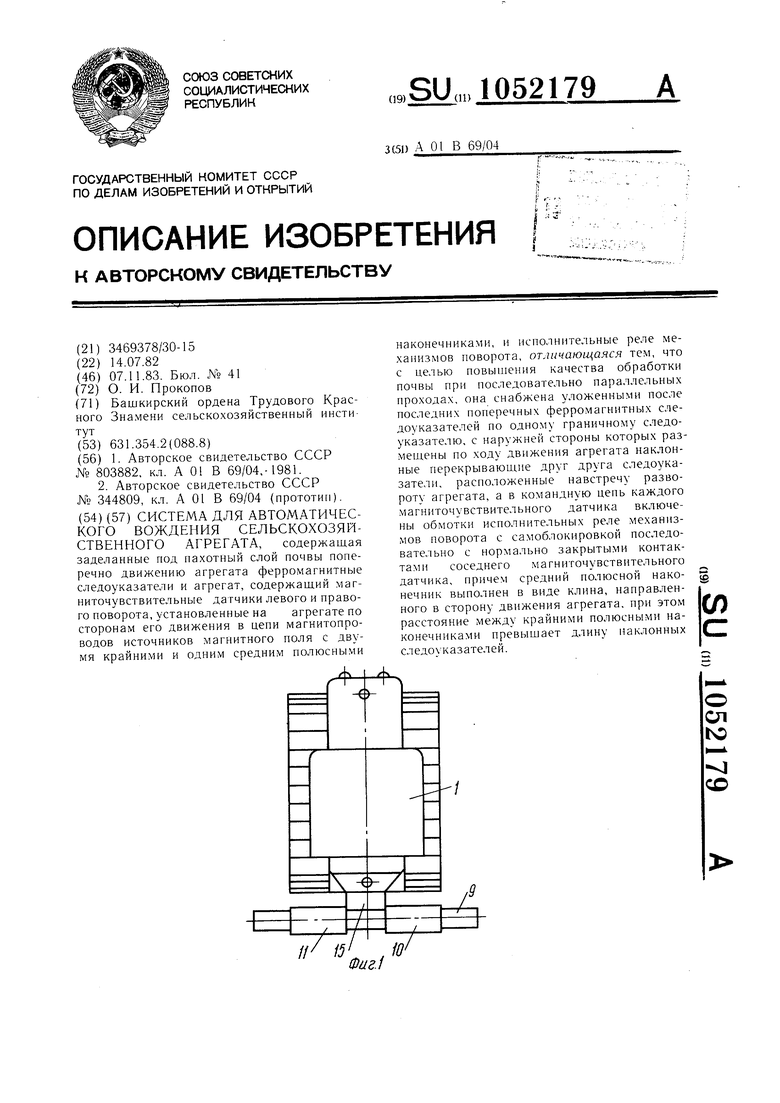
8
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Устройство для автоматического направлениядВижЕНия САМОХОдНОй МАшиНы | 1979 |
|
SU803882A1 |
| кл | |||
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| УСТРОЙСТВО ДЛЯ АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ ДВИЖЕНИЕМ ТРАНСПОРТНОГО СРЕДСТВА | 0 |
|
SU344809A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
