2. Устройство для измерения ли™ нейного ускорения, содержащее инерционную массу в виде шарикаj свободно размещенного во внутренней полости корпуса, в верхней и нижней частях которого расположены соответственно первый и второй детекторы положения шарика, а на равных расстояниях от них расположен детектор прохождения шарика, о т л и ч а ю щ е е с я тем, что, с целью повышения точности измерения5 в него введены две соленоидные соосньге обмотки с заземленной общей точкой, каждая из которых расположена у соответственного детектора положения шарика и охватывает корпус, внутренняя полость которого ограничена поверхностями двух соосных конусов, соединенных: основаниями, в плоскости которых расположен детектор прохождения шарика, выполненный в виде катушки индуктивности, кроме того, в него введены первый, второй и третий усилители-формирователи, первый и второй Е §-триггеры с инвepcны iи входалми, первая и вторая линии задержки, первьй и второй ключи, первый и второй одновибраторы, ло ическая схема , первая, вторая, третья и четвертая схемы 2У, элемент имп.ликации, счетчик, - регистр сдвига, первый и второй регистры памяти, генератор тактовых импульсов и вычислитель, при этом вторые концы соленоидных обмоток соединены соответственно с выходами первого и второго ключей, входы которых соедине5-ш с источником опорного напряжения, а управляющие входы подключены соответственно через первую и вторую линии задержки к прямому и инверсном выходам первого К-З-триггера, вход установки в единичное состояние которого соединен с выходом первого усилителя-формирователя, а вход установки в нулевое состояние соединен с выходом второго ус:ялителя-формирователя, входы первого и второго ycHjnnелей-формирователей подключены соответственно к первому и второму детекторам положения, выполненным преимущественно в виде пьезоквардевьк пластин, а выходы соединены с входами схемы 2И-НЕ, выход которой подключен к ин||юрмационному входу регистра сдвига, тактовый вход которого соедннен с выходом генератора тактовых импульсов и с входом первой с:;-:.,.-rt.i 211, первый выход соедин€ к с вторь: и ЕХО даьш второй и третьей схем 2И, а второй выход соединен с входом обнуления счетчика, выход которого соединен с информационными входами первого и второго регистр- в памяти, выходы которых подключены к информшдионным входам, вычислителя, а входы синхронизации подключены к выходам, соответственно второй и третьей схем 2И, первые входы которых соединены соответственно с прямым и инверсным выходами первого R-S-триггера, детектор прохождения шарика соединен одним концом с землей, а вторьпч - с входом тгвтьего усилителя-формирователя, выход которого соединен с прямым входом элемента импликации, которого подключен ко входу установки в нулевое состояние второго R-S-триггера, прямой выход которого подключен к первому входу первой схемы 2И5 выход которой соединен со счетным входом счетчика, выходы первой и второй линии з;здержки соединены с входами соответственно первого и второго одновибраторов выходы которых подKJдачeны ко входам четвертой схемы 2И,, выход которой подключен одновременно ко входу установки в единичное состояние второго R-S-триггера и к инверсному входу элемента импликации.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ОПРЕДЕЛЕНИЯ ПАРАМЕТРОВ ЛИНЕЙНОГО ДВИЖЕНИЯ И УСТРОЙСТВО ДЛЯ ЕГО РЕАЛИЗАЦИИ | 1995 |
|
RU2089918C1 |
| Устройство для измерения ускорений | 1987 |
|
SU1508172A1 |
| УСТРОЙСТВО ДЛЯ ВЫЯВЛЕНИЯ АСИНХРОННОГО РЕЖИМА ЭЛЕКТРОПЕРЕДАЧИ | 1993 |
|
RU2064726C1 |
| Вибрационный источник сейсмических сигналов | 1983 |
|
SU1138772A1 |
| Измерительное устройство к балансировочному станку | 1984 |
|
SU1182297A2 |
| Устройство для сопряжения с двухпроводной линией приемопередатчика данных | 1986 |
|
SU1394447A1 |
| Струйное регистрирующее устройство | 1983 |
|
SU1205788A3 |
| Устройство для считывания графической информации | 1985 |
|
SU1418777A1 |
| ПРЕОБРАЗОВАТЕЛЬ ИНЕРЦИАЛЬНОЙ ИНФОРМАЦИИ | 2006 |
|
RU2325620C2 |
| Одноканальное устройство для управления -фазным преобразователем | 1978 |
|
SU775855A1 |
I. Способ определения линейного ускорения, заключающийся в возбуждении возвратно-поступательного движения инерционной массы, регистрации за один цикл колебания промежутков времени движения массы между крайними и средншм ее положениями, отличающийся тем, что, с целью повышения точности путем уменьшения влияния перекрестных ускорений, осуществляют задержку движения массы в каждом крайнем положении до полного успокоения массы в этом положении, регистрируют за один цикл врекя движения масс1)1 от одного крайнего положения до среднего и время движения массы от другого крайнего положения до среднего, а ускорение определяют как произведение расстояния, проходимого инерционной массой от крайнего положения к среднемуJ и разности величин, обратных квадратам двух зарегистрированных отрезков времени.
Изобретение относится к измери т.ельной технике и может быть применено для измерения ускорения с выходным сигналом в цифровой форме.
Известен способ измерения линейного ускорения, заключающийся в возбуждении возвратно-поступательного движения свободной инерционной массы, регистрации промежутков времени движения массы от одного крайнего положения до второго и от вто.рого вновь к первому и вычислении ускорения как произведения расстояния , проходимого массой между крайними положениями, и разности величин, обратных квадратам двух зарегистрированных отрезков времени С 1 .
Недостатком этого способа для измерения ускорения является низкая точность, обусловленная ненулевым коэффициентом восстановления скорости шарика после удара и влиянием перекрестных ускорений.
Наиболее близким к изобретению по технической сущности и достигаемому результату является способ измерения линейного ускорения, заключающийся в возбуждении возвратно-поступательного движения инерционной массы, регистрации за один цикл колебания промежутков времени движения массы между крайними и средним ее положениями и в последующих вычислениях. При этом ускорение вычисляется как функция расстояния, проходимого массой от крайнего положения к среднему, и четырех отрезков времени движения массы за один, цикл колебания от крайнего положения к среднему, от среднего к другому крайнему положению, от последнего к среднему положению и от среднего - вновь к исходному край,нему положению.
Известно также устройство для осуществления способа, содержащее инерционную массу в виде шарика, свободно размещенного во внутренней полости корпуса, в верхней и нижней частях которого расположены соответственно первый и второй детекторы положения шарика, а на равных расстояниях от них расположен детектор прохождения шарика 23.
Известный способ не позволяет получать высокую точность измерений и избавиться от действия перекрестных ускорений. Точность измерений невысока вследствие того, что способ не обеспечивает стабильных начальных условий движения материального объекта-инерционмой массы всякий раз при смене напраБлепг я движения в каждом из край} их поло жений,0т погрешности, вносиг-юн
перекрестными ускорениями принципиально невозможно избавиться, так как вычисляемое ускорение является функцией регистрируемых за каждый цикл колебания четьфех отрезков
времени, из которых как минимум два искажаются перекрестными ускорениями.
Кроме того5 устройство для осуществления способа не обеспечивает
стабильного коэффициента восстановлення скорости массы после удара о торцовый электрод (коэффициент лежит в пределах 0-1), что приводит к неопределенности характера контакткого взаимодействия инерционной массы и электрода и к непредсказуемому изменению вектора скорости массы после упругого удара, и снижает точность измерен™. Конструктивное исг
полнение устройства не позволяет избавиться от влияния перекрестных ускорений, так как последние приводят к смещению массы от оси чувствительности устройства, к боковым
стенкам внутренней полости и контактированию массы . со стенками, что искажает траекторию и параметры движения массы и отражается на истинных значениям фиксируемых интервалов
времени. Кроме того, необходимость контакта массь: с центральным элект родом для передачи и перемены знака заряда приводит также к случайному изменению вектора скорости массы и
к снижению точности р$змерений.
Целью изобретения является увеличение точности путем уменьшения влияния nepeKpecTiibix ускорений.
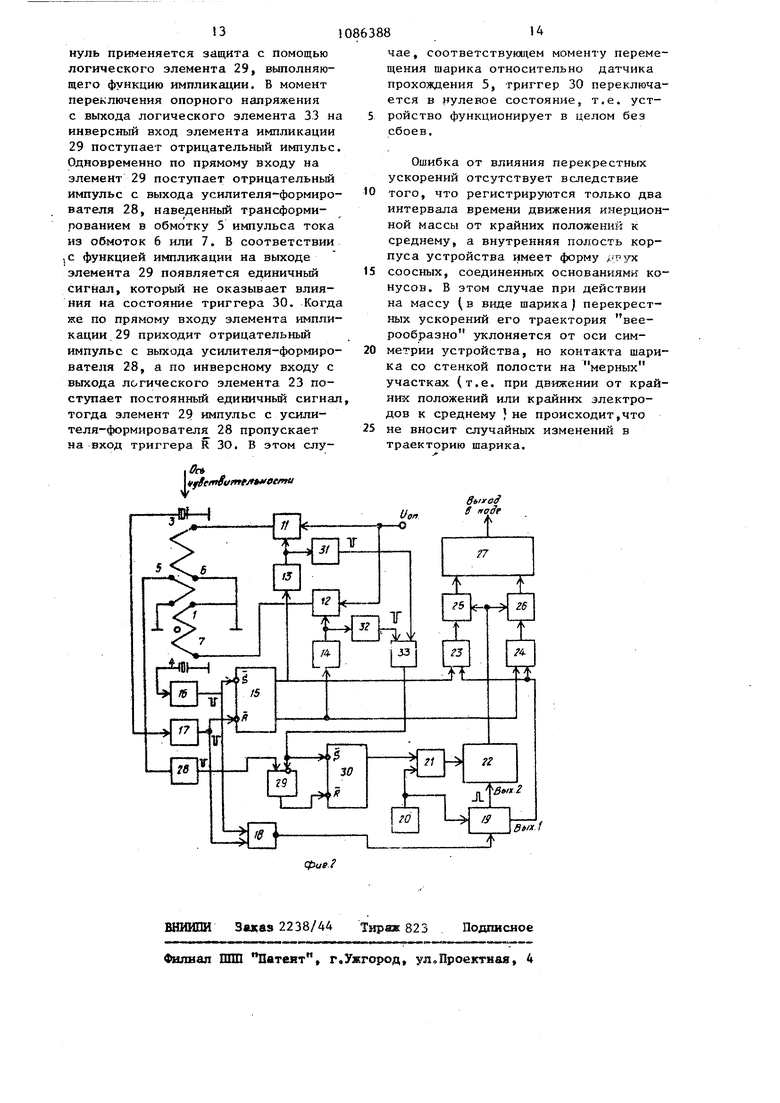
Указавшая цель достигается тем, что согласно способу, заключающемуI ся в возбуждении воэвратно-поступа-- тельного движения инерционной мае- сы, регистрации за один цикл коле- бания промежутков времени движения массы между крайними и средним ее положениями, осуществляют задержку движения массы в каждом крайнем положении, регистрир тот за один цихсл время движения массь от одного край него положения до среднего и время движения массы от другого крайнего положе шя до среднего, а ускорение определяют как произведение расстоя-ния 5 проходимого инерционной массы от крайнего положения к среднему, и разности величин5 обратных квадратам двух зарегистрировангаш отредков времени. Кроме того 5 устройство содержащее инерционную массу в виде шарика свободно размещенного во внутренней полости корпуса э в верхней и нижней частях которого расположены соответственно первый и второй детекторы положения шарика, а на равных расстояниях от них расположёны детектор прохождения шарика, дополнительно введены две соленоидные соос ные обмотки с заземленной общей точ кой э каждая из которых расположена у соответственного детектора положения шарика и охватывает корпус ; внутренняя полость которого ограничена поверхностями двух соосных конусов, сое;ллненных основаниями в плоскости которых расположен детектор прохождения шарика, выполненный в виде катушки индуктивности,,- кроме того в него введены первьм. второй и третий усилители форм1-1рователи, пе.рвый и второй К--8-тр15Ггеры с инверсными входа и первая и вторая линии 3ap,epjKKH первый и второй КЛЮЧИ;, первый и второй одновибраторы, логическая схема ЯИ-НЕ первая, вторая 5 третья и четвертая схемы 2Н, элемент импликацииj счетчик 5 регистр сдвигa,s первый и второй регистры ПШ.1ЯТИ5 генератор тактовых импульсов, вычисдштель5 при этом вторые концы соленоидных абмо- ток соединенъ соответственно с выходами первого и второго ключей,, входы которых соединены с источником опорного напряжения5 а управляющие входы, подключень соотзет ственно через перхэую и зтсруго линии задержи к прямому и инверсному выходам первого К-й-тркггера, вход установки в единичное состояние которого соединен с выходом первого усилителя-формирователя 5 а вход установки в нулевое состояние соединен с выходом второго усштителяформирователя 5 входы первого и второго усилителей-формирователей подключены соответственно к первому и второму детекторам положения, выполненным в виде пьезокварцевых пла выходы соединены также с вхо дами схемы 2И-НЕ, выход которой подключен к информационному входу регистра сдвига, тактовый вход которого соединен с выходом генератора тактовых импульсов и с в годом первой схемы , пeгJBЫй Е::;СТ.Д соединен со вторыми входами второй и третьей схем 2И, а второй выход соединен с входом обнуления счетчика, выход которого соединен с инфор:.)ационными входами первого и второго регистров , выходы- которьгх подключены к информационным входам вычислителя, а входы сикхро: : :ации подключены к выходам сооть етг. свенио второй и третьей схем 211, первые входы которых соедиианы соотвзтственно с прямым .и инверсным выходами первого R-S-триггера, детектор прохогкдения шарика соединен одним концом с землей, а вторым - -. входом третьего усилителя-форг-етрователя, вьпсод которого соединен с прямым входом элемента импликацкп, выход которого подключен к входу установки в нулевое состояние второго R.-S-TpHrrepaj прямой выход, которого подключен к первому входу первой схемы 2И, выход которой соединен с счетньш входом счетчика, выходы первой и второй линии задержки соединены свходами соответственно первого и второго одновибраторов, вькоды которых подключены к входам четвертой 2И, выход которой подключен одновременно к входу установки Б единишое состояние второго К-Б-триггера и к инверсному входу элемента ш-шликации. Согласно предлагаемому способу ускорение W вычисляется по формуле г - t ---t|b. рассто ние, проходимое инерционной массой от крайнего положения к среднему; t - время .ня инерционной массы от о.амого крайнего по.яожения к среднему; t,, - время движения г;нерционной массы от другоао крайнего положения к среднему.. Задержка движения массы в каждом райнем положении на время, необхот-юе для полного успокоения массы в STCM положении, устанавливает строго определен Л11е иача/гьные услоия движа-яия массы при каждом цикле зкжелщя, а име.кно с нулевой начальной скоростью, что повышает то ности измерений. Регистрация тольк двух интервалов времени движения массы от крайних положений к среднему позволяет избавиться от влияния перекрестных ускорений, т.е. избрать такой режим измерений, при котором не учитываются интервалы времени движения массы от среднего положения к крайним, которые могут быть искажены действием перекрестных ускорений, и повышается точность измерений, В предлагаемом устройстве особая форма внутренней полости корпуса - в виде двух соединенных основаниями конусов, а также учет только двух интервалов времени t и t- движения массы от крайних электродов к центральному, позволяет избавиться от действия перекрестных ускорений, так как. в течение времени t или t™ масса может свободно перемещаться под действием всех ускорений без контакта со стенками корпуса. Введение в устройство- линии задержки осуществляют задержку в переключении внешнего ускоряющего поля (в данном случае электромагнитного) для гашения скорости массы при кон такте с крайним детектором положения и устанавливают гарантированный результирующий нулевой коэффициент восстановления скорости шари ка после удара. В устройстве исклю чен непосредственный контакт массы с детектором прохождения шарика. Все это повьш ает его точность. На фиг. 1 изображено устройство для измерения линейного ускорения, общий вид в разрезе; на фиг. 2 приндипиаль ная электрокинематическая схема устройства. Устройство содержит инерционную массу 1 в виде шарика из магнитног материала, корпус 2, два детектора положения шарика, соответственно 3 и 4, из пьезокварца, детектор прохождения шарика 5 в виде катушки индуктивности, первую соленоидную обмотку 6, вторую соленоидную об-. мотку 7, элементы крепления 8 и 9 торцовых электродов, экранный кожух 10, первый и третий ключи 11 и 12, первую и вторую линии задерж ки 13 и 14, первый триггер с инверсными входами 5, первый и второй усилители-формирователи 16 и 17, схему 2И-НЕ 18, регистр сдвига 88 19, генератор тактовых импульсов 20, первую схему 2И 21, счетчик 22, вторую и третью схемы 2И 23 и 24, первый и второй регистры памяти 25 и I 26, микропроцессорный вычислитель 27,третий усилитель-формирователь 28,элемент импликации 29, второй R-S-триггер с инверсным входами 30, первый и второй одновибраторы 31 и 32, четвертую схему 2И 33. Инерционная масса 1 свободно размещена во внутренней полости корпуса 2, в верхней и нижней частях которого расположены детекторы положения 3 и 4. Внутренняя полость ограничена двумя коническими соосными поверхностями, имеющими общее основание. Корпус 2 охвачен катушкой индуктивности детектора прохождения шарика 5, находящейся на равных расстояниях от детекторов 3 и 4, и располаганщимся между соленоидными об- ; мотками 6 и 7, охватывающим: корпус 2 в области соответствующих конусообразных полостей. Детекторы положения 3 и 4 укреплены в корпусе 2 элементами крепления соответственно 8 и 9. Снаружи устройство охвачено экранным кожухом 40. Соленоидные обмотки 6 и 7 соединены последовательно и имеют общую среднюю заземленную точку, а гторые их концы соединены с выходами ключей соответственно 11 и 12. Входы ключей 11 и 12 соединены с источником опорного напряжения и а управляющие входы подключены соответственно через линии задержки 13 и 14 к прямому и инверсному выходам R-S-триггера 15 с инверсными входами. Вход установки в 1 R-S-триггера 15 соединен с выходом усилителя-формирователя 16, а вход установки в О подключен к выходу усилителя-формирователя 17. Входы усилителей-формирователей 16 и I7 соединены с торцовыми электродами соответственно 7 и 6, а выходы подключены также к входам схемы 2И-НЕ 18, выход которой подключен к информационному входу регистра сдвига 19. Тактовый вход регистра сдвига 19 соединен с выходом генератора тактовых импульсов 20 и с входом первой схемы 2И 2I, второй Выход соединен со входом обнуления счетчика 22, а первый выход соединен со вторыми входами второй и третьей схем 2И 23 и 24, первые входы которых соединены соответственно с прямым и инверсным выходами R-S-триггера 15, а выходы соединены со входами синхронизации соответственно первого и второго регистров памяти 25 и 26, у которых информационные входы подключены к выходу счетчика 22, а выходы подключены к информационным входам микропроцессорного вычислителя 27. Детектор прохождения шарика 5 одним концом заземлен а другим концом подключен на вход третьего усилителя-формирователя 28, выход которого соединен с входом элемента импликации
29,у которого выход подключен к входу установки в О второго R-S-триггера 30. Выходы первой и второй линий задержки 13 и 14 подключены к входам соответственно первого и второго одновибраторов 31
и 32, выходы которых соединены с входами четвертой схемы 2И.ЗЗ, Выход схемы 2И 33 соединен с инверсным входом элемента импликации 29 и с входом установки в 1 триггера
30,прямой выход которого соединен с первым входом первой схемы 2И 21, а выход схемы 2И 21 соединен со счетным входом счетчика 22.
Устройство для измерения линейного ускорения работает следующим образом.
При нулевом ускорении, посредством переключакяцей системы, состоящей из обмоток 6 и 7, источника опорного напряжения (на чертеже не показан), ключей J1 и 12, пьезодатчиков 3 и 4, усилителейформирователей 16 и 17 и R-S-триггера 15 осуществляется колебательное движение шарика между детекторами 3 и 4. Например, если триггер 15 находится в единичном состоянии, то открыт ключ II, а ключ 12 закрыт, движение шарика при этом происходит от обмотки 7 в сторону обмотки 6. При достижении шариком крайнего положения, т.е. при соприкосновении с пьезодатчиком 3, в пьезодатчике наводится импульс ЭДС, который далее усиливается усилителем-формирователем I7 и с выхода последнего поступает на вход R-установки в О триггера 15. После этого к.гаоч 11 закрывается , а ключ 12 открывается. При этом источник опорного напряжения Unn подключается к обмотке 7 и
шарик начинает перемещаться в сторону обмотки 7. При достижении шариком пьезодатчкка 4 снова происходит переключение триггера 15 и процесс повторяется. Передача сигналов с
прямого и инверсного выходов триггера 5 на управляющие входы ключей 1 и 12 осуществляется через линии задержки 13 и 14. Длительность за0 держки fg должна быть не меньше времени успокоения шарика при соударениях о пьезодатчик 3 или 4 j что гарантирует нулевой коэффициент восстановления скорости шаргка пос5 ле удара. Время успокоения может быть вычислено теоретически или определено экспериментально.
В течение одного цикла колебаний
Q шарика (от пьезодатчика 3 к пьезодатчику 4 и обратно или от пьезодатчика 4 к пьезодатчику 3 и обратно) электронная схема измеряет и фиксирует два интервала времени: время t- движения инерционной массы от одного пьезодатчика. (например 3) к центральному датчику 5 и время t двиясения массь от другого пьезодатчика к центральному датчику. Время
Q двилсения шарика от центрального датчика 5 к пьезодатчику 3 или 4 не измеряется. Смысл таких измерений заключается в том, что для исключения влияния перекрестных ускорений на результат измерения ускорения инерционной массе предоставляется возможность свободного движения под действием суперпозиции электромагнитной силы и инерционных сил любого направления. При этом его траектория под действием различных перекрестных ускорений с момента начала движения может веерообразно расходитьея от оси симметрии устройства, и, если выполнить соответствующие участки внутренней полости .устройствав конусообразной форме, то при движении от крайних датчиков к центральному контакт массы со стен-. кой будет исключен. Характер же дальнейшего движения шарика от центрального детектора к крайним, при котором возможен контакт со стенкой, не играет ро.пи, так как время этого движения не измеряется. Размер ос5 нования конусообразных полостей однозначно определяется величиной перекрестных ускорений. Следовательно, два фиксируемых интервала времени
tj и tj функционально связаны только спроекцией вектора ускорения на ось чувствительности устройства. Измерение времени прохождения шариком расстояния от пьезодатчика 3 или 4) до детектора прохождения осуществляется следующим образом. Отсчет времени всегда начинается с момента переключения опорного напряжения с обмотки 6 на обмотку 7 (или наоборот с обмотки 7 на обмотку 6). Этот момент соответствует окончанию удара шарика о пьезодатчик 3 или А. При каждом переключении обмоток 6 и 7 с выходов формирова :елей коротких импульсов 31 или 32 короткий отрицательный импульс устанавливает триггер 30 в единичное состояние. При этом эталонная частота от кварцевого генератора 20 через логический элемент 21 поступает на вход счетчика 22. Заполнение счетчика 22 заканчивается в момент, когда шарик 1 пролетает через детектор прохождения 5. При этом импульс, наводимый в детекторе 5, усиленный и сформированный в виде отрицательного короткого импульса с выхода усилителя-формирователя 28 через логический элемент импликации 29 (при условии, если на его инверсном входе находится единичный сигнал) поступает на вход установки в О триггера 30.
Далее, при движении шарика от детектора прохождения 5 до пьезодатчика 3 (или 4) триггер 30 находится в нулевом состоянии и заполнение счетчика 22 не происходит. В момент касания шариком пьезодатчика 3 (или 4) импульс, вырабатываемый усилителем-формирователем 17 (.или 16), по переднему фронту импульса удара через логический элемент 18 в виде короткого положительного импульса поступает на вход синхронизации ближайшего тактового импульса с эталонного генератора 20, на первом выходе регистра сдвига появляется единичный сигнал. Этот сигнал является разрешагадим для переписи информации, записанной в счетчике 22, в регистр памяти 25 или 26 (в зависимости от того, в каком состоянии находится триггер 15). Второй тактовый импульс сдвигает I с первого выхода регистра сдвига 19 на второй выход и осуществляет тем самым обнуление счетчика 22. Перепись информации из счетчика 22 в один из регистров памяти (25 или 26) микропроцессорного вычислителя осуществляется в течение нремени задержки сигнала переключения опорного напряжения линией задержки 13 или 14. Длительность задержки Г должна быть равна или
0 более длительности двух тактовых импульсовЦ. , вырабатываемых генератором 20, т, е. Т2 . После задержки осуществляется перекл очение опорного напряжения, шарик nes ремещается в противоположном направлении, и процесс измерения времени движения до центрального датчика 5 повторяется. Результат измерения времени записывается в другой регистр
0 памяти. Микропроцессорный вычислитель 20 по результатам измерения времени движения шарика по направлению оси чувствительности (t) и против нее (tj), коды которых записаны в
5 регистрьс памяти 25 и 26, осуществляет далее вычисление., ускорения по алгоритму в соответствии с формулой ( I ).
При нулевом ускорении время дви0жения шарика по направлению оси чувствительности и против него является одинаковым и расчетное значение ускорения на выходе микропроцессорного вычислителя 27 будет нулевым.
5
Если по направлению оси чувствительности действует ускорение, то время t движения шарика по направлению оси чувствительности бу0дет меньшим по сравнению с временем t движения против направления действия ускорения, так как в первом случае электромагнитные силы и силы инерцит складьшаются, а во втором 5вычисляются. При действии ускорения против направления оси чувствительности работа устройства осуществляется аналогично, но результат измерения ускорения имеет знак -.
0
В данном устройстве в момент переключения опорного напряжения из обмотки 6 (или 7 ) в обмотку 5, являющуюся центральным датчиком положения шарика, трансформируется им5Пульс тока. Это может привести к ложным переключениям триггера 30. Для устранения ложных переключений на входе R установки триггера 30 в 13 нуль применяется защита с помощью логического элемента 29, вьтолняющего функцию импликации. В момент переключения опорного напряжения с выхода логического элемента 33 н инверсный вход элемента импликации 29 поступает отрицательный импульс Одновременно по прямому входу на элемент 29 поступает отрицательный импульс с выхода усилителя-формирователя 28, наведенный трансформированием в обмотку 5 импульса тока из обмоток 6 или 7, В соответствии 5 с функцией импликации на выходе элемента 29 появляется единичный сигнал, который не оказывает влияния на состояние триггера 30. Когда же по прямому входу элемента импликации 29 приходит отрицательный импульс с выхода усилителя-формирователя 28, а по инверсному входу с выхода логического элемента 23 поступает постоянный единичный сигнал тогда элемент 29 импульс с усилителя-формирователя 28 пропускает на вход триггера R ЗО. В этом слу,ffc Vf/ef VftTf tt ffe/va
У
SbifO 8 чае, соответствующем моменту перемещения шарика относительно датчика прохождения 5, триггер 30 переключается в нулевое состояние, т.е. устройство функционирует в целом без сбоев. Ошибка от влияния перекрестных ускорений отсутствует вследствие того, что регистрируются только два интервала времени движения инерционной массы от крайних положений к среднему, а внутренняя полость корпуса устройства имеет форму двух соосных, соединенных основаниями конусов. В этом случае при действии на массу (в виде шарика) перекрестных ускорений его траектория веерообразно уклоняется от оси симметрии устройства, но контакта шарика со стенкой полости на мерных участках (т.е. при движении от крайних положений или крайних электродов к среднему } не происходит,что не вносит случайных изменений в траекторию шарика.
| I | |||
| АКСЕЛЕРОМЕТР | 0 |
|
SU393683A1 |
| Прибор для нагревания перетягиваемых бандажей подвижного состава | 1917 |
|
SU15A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Акселерометр | 1973 |
|
SU498555A2 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
