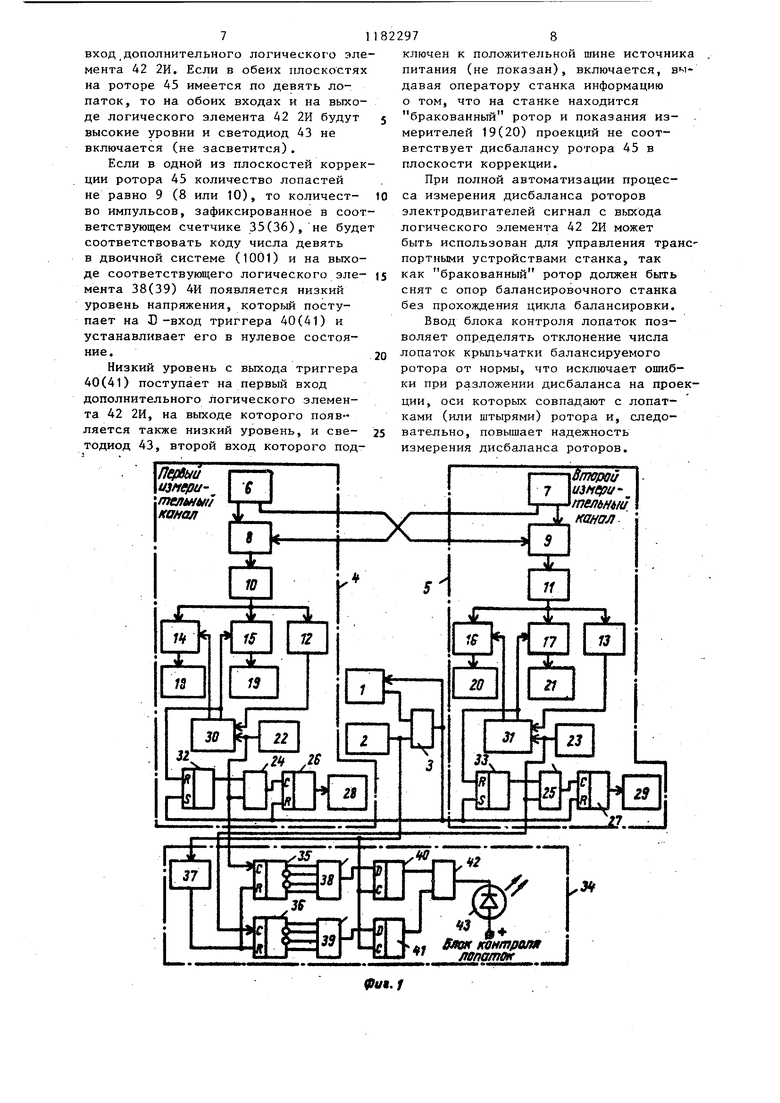
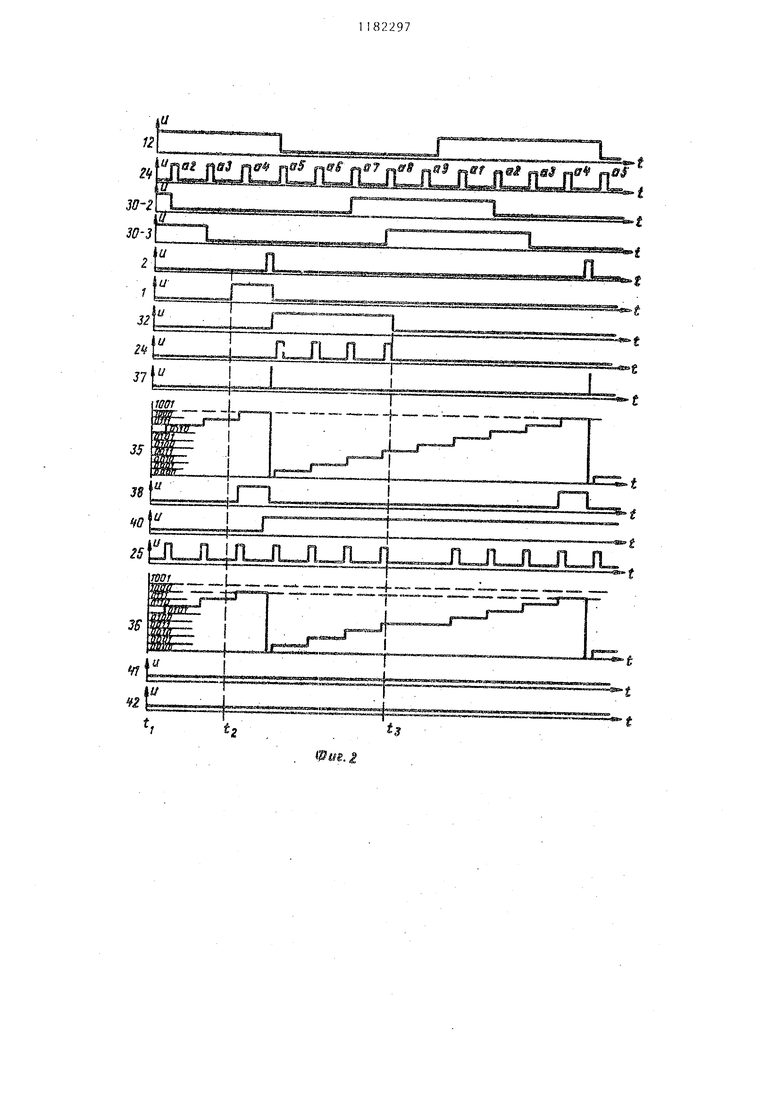
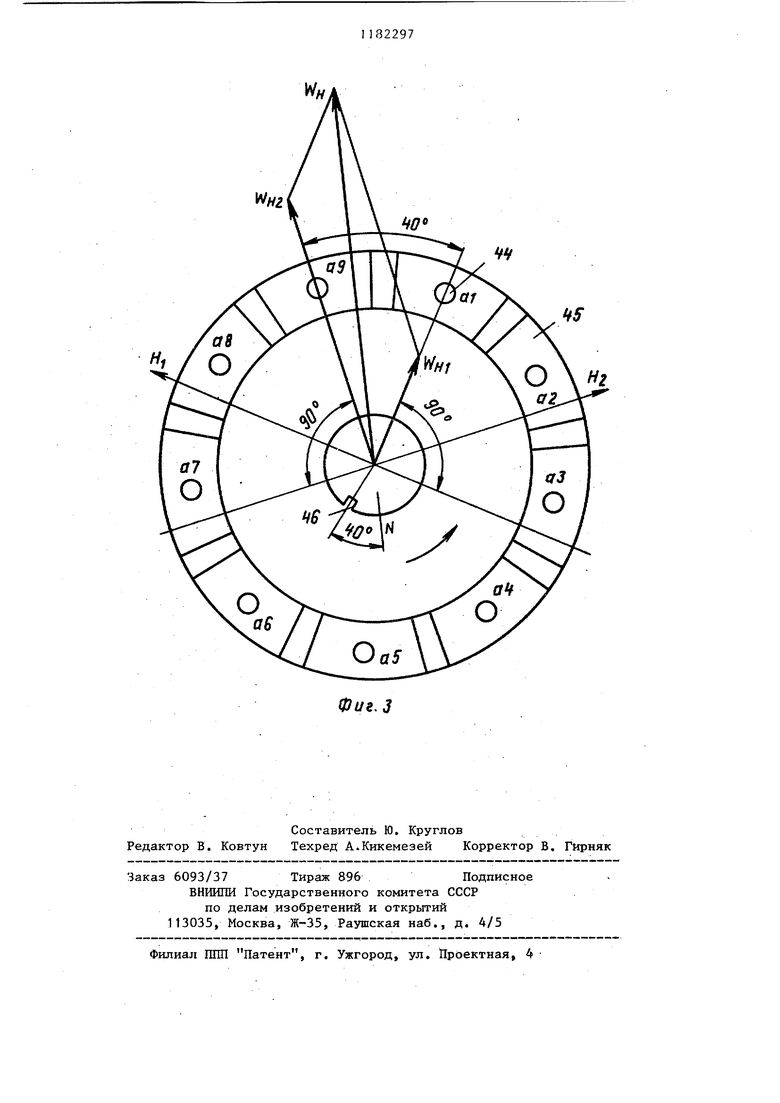
Изобретение относится к балансировочиой технике, использующейся в станках для балансировки роторов электродвигателей при коррекции дисбалансов путем установки корректирующих грузов на штырях между лоп ками ротора, и является дополнитель ньпч к авт.св.№ 1096511. Цель изобретения - повышение надежности определения дисбаланса. На фиг. 1 изображена функциональ ная схема измерительного устройства к балансировочному станку на фиг. временные диаграммы .работы элем€.н тов измерительного устройства, на фиг. 3 - нанесенная на торец ротора асинхронного электродвигателя векторная диаграмма. Измерительное устройство к балансировочному станку содержит блок 1 управления, генератор 2 опор ных сигналов, первый логический элемент 3, входы которого связаны с выходами блока 1 управления и генератора 2 опорных: сигналов, измерительные каналы 4 и 5, каждый из которых выполнен в виде соединенных последовательно датчика 6(7) дисбаланса, сумматора 8(9), второй вход которого соединен, с выходом датчика 7(6) дисбаланса другого измерительного канала 5(4), усилителя 10(11) и формирователя 12(13), двух синхронных детекторов 14 и 15 (16 и 17), первые входы которых соединены между собой и с выходом усилителя 10(11), двух измерителей проекций 18 и 19 (20 и 21), связанных соответственно с выходами CKHXp ных детекторов 14 и 15 (16 или 17), последовательно соединенньк датчика 22 (23) лопаток, второго логическог элемента 24(25) 2И, десятичного счетчика 26(27) и цифрового индикатора 28(29)j пятиразрядного кольцевого регистра 30(31), первый вход которого соединен с вьпсодом формиро вателя 12(13), второй вход - с выходом датчика22(23) лопаток, а пер вый выход - со вторым входом пер вого синхронного детектора 14(16), триггера 32(33), выход которого свя зан со вторым входом второго логического элемента 24(25) 2И, R -вход связан со вторым входом второго синхронного детектора 15(17), а -входы триггеров 32 и 33 соединены между собой и связаны с выходом пер вого логического элемента 3 2И, вхст-. дом блока 1 управления и вторыми входами десятичных счетчиков 26 и 27 в обоих каналах, и блок 34 контроля лопаток, который выполнен в виде первого и второго четырехразрядных двоичных счетчиков 35 и 36, счетные входы которых соединены соответственно с выходами датчиков 22 и 23 лопаток первого и второго измерительных каналов, дополнительного формирователя 37 импульсов, выход которого соединен с предустановочными входами четырехразрядных двоичных счетчиков 35 и 36, первого логического элемента 38 4И, каждый из входов которого соединен с выходом одного из разрядов счетчика 35, второго логического элемента 39 4И, каждьй из входов которого соединен с выходом одного из разрядов счетчика 36, второго и третьего триггера 40 и 41, С -входы которых соединены между собой, с выходом генератора 2 опорных сигналов и с входом дополнительного формирователя 37. Л-вход триггера 40 соединен с выходом логического элемента 38 4И., а К-вход триггера 41 - с выходом логического элемента 39 4И, дополнительного логического элемента 42 2И, входы которого соединены с выходами триггеров 40 и 41 и светодиода 43, подключенного к выходу дополнительного логического элемента 42 2И. На-временной диаграмме .(фиг. 2) работы элементов измерительного устройства представлены уровни или форма напряжений на выходах элементов, номера которых, обозначенные в левой части на фиг. 2, соответствуют размеру элементов на фиг. 1. Для двоичных счетчиков условно изображено состояние этих счетчиков в двоичном кодеЧерез ti обозначено время начала измерения, через tg - начало отсчета номера штыря 44 на торце ротора 45, на который по технологии балансировки ротора 45 одевается коррек тирующий груз (не показан) при коррек дни дисбаланса, а через i.j - конец отсчета номера штыря для постановки корректирующего груза. На временной . диaгpa iмe приведен цикл работы устройства при балансировке ротора, у которого на правой крыльчатке обломана одна из лопаток (а9). На векторной диаграмме (фиг. 3) нанесенной на торец ротора 45 асинронного электродвигателя 5 через обозначен вектор начального дисбаанса ротора 45 в плоскости коррекции, ерез W(| А1ц,проекции Wj на разрешенные направления коррекции (бли- g айшие штыри), через Hj и Hg оси проекций (фаза сигнала, подаваеого на второй вход синхронных детек торов 14 и 15 (16 и 17) в качестве опорного), а через а,..ад - но- fO мера штьфей 44 ротора 45 в порядке прохождения их под датчиком 22 (23) опаток по ходу вращения ротора 45 при балансировке. Номер а присваивается пepвo fy штырю 44 после вектора 15 Wjj,, Стрелкой обозначено направление вращения роторов 45 npps балан-сировке. Через М обозначен импульс от генератора 2 опорного сигнала, который совпадает с расположением 20 шпоночного паза 46 на валу ротора (с учетом статическор ошибки в 40°).
Для коррекции дисбаланса VJ i, (фиг.З) необходимо измерить проек- 25 ции дисбаланса WH , Иа разрешенные направления коррекции и Бьщать оператору станка информацию о величине корректирующей массы и о номере штыря 44, определяющего . зо разряженные направления коррекции
Устройство работает следующим образом.
Колебания опор станка, пропорциональные дисбалансу ротора 45 35 асинхронного электродвигателя в плоскости опоры (не показаны), воспринимаются и преобразовываются в электрический сигнал датчиком 6(7) дисбаланса, связанным с опорой балан- 40 сировочного станка. С помощью сумматоров 8 и 9 производится разделение плоскостей коррекции. Выходной сигнал сз.мматора 8(9) усиливается и фильтруется от помех 45 усилителем 10(11) и поступает на входы синхронных детекторов 14(16), 15(17) и на вход формирователя 12(13): Импульсы прямоугольной формы с выхода формирователя 12(13) посту- 50 пают на первый вход кольцевого регистра 30(31). Выходные импульсы второго и третьего разрядов регистра 30(31) изображены на фиг. 2 и обозначены через 30-2 и 30-3 55 (31-2 и 31-3), На второй вход регистра 30(31) поступают импульсы с датчика 22(23) лопаток, который
представляет собой датчик периферийного действия, например емкостной или индуктивный, с входящим в него формирователем импульсов, что позволяет получить импульс малой длительности при прохождении лопатки над датчиком 22(23) лопатк Так как все разряды регистра 30(31 устанавливаются в единицу передним фронтом импульса с выхода форми, рователя 12 (13), фаза которого зависит от углового расположения дисбаланса 1Уц , то фаза выходных импульсов на выходах триггеров регистра 30(31) будет зависеть от углового расположения вектора к от расположения лопаток (5;1тьфей) на роторе 45, Как видно из векторной диаграммы на фиг. 3, к синхронным детекторам 14(16)- и .15(17) следует подвести, соответственно опориьш сигнал с инверсного выхода второго разряда регистра 30(31) (первый выход) и с прямого выхода третьего разряда регистра (30) 31 (второй выход) Эти импульсы ортогоналыпл к направлениям VVj|, (второй выход) (первый выход). На выходе синхронного детектора 14(16) получают постоянное капряжегпле, пропорциональное Wj.,. . а на выходе синхронного детектора 15(17) -Vi,,. С выходов синхронных детекторов 14 п 15 (16 и 17) постоянные напряжения поступают на входы измерителей 18 и 19 (20 и 21) проекций соответственно и запоминаются К ьждый из измерителей 18(20) и 19(21) проекций может быть реализован с помощью, например, аналогового запоминающего устройства и стрелочного прибора. В момент времени t с блока 1 управления на второй вход первого логического элемента 3 2И поступает высокий уровень напряжения, разрешающий прохож,цение импульсов с вьтода генератора 2 опорных сигналов на 5 -вход триггера 32(33) Паредний фронт каждого из импульсов генератора 2 опорных сигналов совпадает с расположением шпоночного паза 46 на валу балансируемого ротора 45s, кинематически связанного с генератором 2 опорных сигналов На триггера 32(33) поступают импульсы со второго выхода кольцевого регистра 30(31). Так как фаза т 1цульса с выхода генератора, 2 завнсит от расположения шпоночнод о паза 46 балансируемого ротора 45, а фаза сигнала второго выхода регистра 30(31) связана с угловым рас положением проекции начального дисб ланса WH, J то на выходе триггера 32(33) формируется импульс напряжения, длительность которого пропор циональна углу между расположением шпоночного паза 46 и оси коррекции н,. Для перевода длительности импуль са с выхода триггера 32(33) в цифровую форму, сигнал с выхода триг гера 32(33).поступает на вход второ го логического элемента 24(25) 2И, разрешая тем самым прохождение импульсов с выхода датчика 22(23) лопаток на счетньй вход десятичного счетчика 26(27), который был установлен в нулевое состояние передним фронтом импульса с выхода первого логического элемента 3 2И, пос тупившего на второй вход счетчика 26(27). Таким образом, в десятичный счетчик 26(27) записан порядковый номер (по направлению вращения рОтора 45 при .балансировке) штьфя 44 между лопатками ротора 45, через которьй проходит ось коррекции Wn,. Ошибка в один номер учитьшается при наладке станка установкой генератора 2 опорных сигналов. Записанный в десятичный счетчик 26(27) номер инд цируется цифровым индикатором ;28(29). По заднему фронту и lпyльca с выхода первого логического элемен та 3 2И, поступившего на вход блока 1 управления, снимается разрешающая команда на выходе блока 1 Вторая ось коррекции W легко находится оператором, так как она проходит через следующий по ходу вращения штьфь 44. Аналогично описанному вьш1е работает второй измерительный канал. Одновреме.нно с измер.ением параме ров дисбаланса в каждой из плоскостей коррекции происходит контроль количества лопаток ротора 45. На счетный вход первого четьфехрязрядного двоичного счетчика 35 в .процессе вращения ротора 45 поступа.ют импульсы с выхода датчика 22 лопаток, а на счетный вход второго четырехразрядного двоичного счетчика 36 - с выхода датчика 23 лопаток Каждый из счетчиков 35 и 36 может быть реализован на четьфех 31 -триггерах серии К511. На входы предварительной установки счетчиков 35 и 36 поступают импульсы с выхода дополнительного формирователя 37, который представляет собой ждущий мультивибратор на логических элементах серии К511 с запуском отрицательным фронтом сигнала с выхода генератора 2 опорных сигналов. Каждым импульсом формирователя 37 четьфехразрядные двоичные счетчики 35 и 36 устанавливаются в нулевое состояние. Так как за один оборот ротора генератор 2 опорньк сигналов, представляющий собой датчик периферийного действия, установленный в плоскости шпоночного паза 46 на валу ротора 45, формирует один импульс (фиг. 2), то количество импульсов, поступивших на счетный вход и фиксируемых счетчиком 35(36) за один оборот ротора 45, соответствует количеству лопаток крыльчатки ротора 45 в первой (второй) плоскости коррекции. Состояние счетчиков 35 и 36 анализируется логическими элементами 38 и 39 4И, на вхсг ды которых подключаются прямые выходыпервого и четвертого разрядов и инверсные выходы второго и третьего разрядов счетчиков 35 и 36. Если количество лопаток ротора 45 в плоскости коррекции равно девяти, то между двумя импульсами генератора 2 опорных сигналов (за один оборот ротора 45) в четьфехразрядном двоичном счетчике 35(36) зафиксируется девять импульсов датчика 22(23) лопаток и комбинация логических сигналов на его прямых выходах будет 1001. Так как на второй и третий входы логического элемента 38(39) 4И подключены инверсные выходы второго и третьего разрядов двоичного счетчика 35(36), то на все входы логического эл.емента 38(39) 4И поступает высокий уровень напряжения, на выходе логического элемента 38(39) 4И появляется также высокий уровень напряжения и поступает на О-вход второго (третьего) триггера 40(41). В момент поступления импульса с выхода генератора 2 опорных сигналов на С-вход триггера 40(41) последний устанавливается в единичное состояние и высокий уровень с прямого выхода триггера 40(41) поступает на вход дополнительного логического эле мента 42 2И. Если в обеих плоскостях на роторе 45 имеется по девять лопаток, то на обоих входах и на выходе логического элемента 42 2И будут высокие уровни и светодиод 43 не включается (не засветится). Если в одной из плоскостей коррек ции ротора 45 колич ество лопастей не равно 9 (8 или 10), то количество импульсов, зафиксированное в соот ветствующем счетчике 35(36), не буде соответствовать коду числа девять в двоичной системе (1001) и на выходе соответствующего логического элемента 38(39) 4И появляется низкий уровень напряжения, который поступает на II-вход триггера 40(41) и устанавливает его в нулевое состояние. Низкий уровень с выхода триггера 40(41) поступает на первый вход дополнительного логического элемента 42 2И, на выходе которого появляется также низкий уровень, и светодиод 43, второй вход которого подключен к положительной шине источника питания (не показан), включается, выдавая оператору станка информацию о том, что на станке находится бракованный ротор и показания измерителей 19(20) проекций не соответствует дисбалансу ротора 45 в плоскости коррекции. При полной автоматизации процесса измерения дисбаланса роторов электродвигателей сигнал с выхода логического элемента 42 2И может быть использован для управления транспортными устройствами станка, так как бракованный ротор должен быть снят с опор балансировочного станка без прохождения цикла балансировки. Ввод блока контроля лопаток позволяет определять отклонение числа лопаток крыпьчатки балансируемого ротора от нормы, что исключает ошибки при разложении дисбаланса на проекции, оси которых совпадают с лопатками (или штырями) ротора и, следовательно, повышает надежность измерения дисбаланса роторов.
Н.
Фиг.З
tЧ
tfS
| название | год | авторы | номер документа |
|---|---|---|---|
| Измерительное устройство к балансировочному станку | 1983 |
|
SU1096511A1 |
| Измерительное устройство к балансировочному станку | 1984 |
|
SU1196709A1 |
| Устройство для динамической балансировки роторов лучом лазера | 1985 |
|
SU1226091A1 |
| Устройство для динамической балансировки роторов лучом лазера | 1988 |
|
SU1515086A2 |
| Устройство для динамической балансировки лучом лазера роторов | 1983 |
|
SU1130753A2 |
| Измерительное устройство к балансировочному станку | 1985 |
|
SU1320670A1 |
| Балансировочное устройство | 1982 |
|
SU1054695A1 |
| Способ настройки балансировочного станка | 1984 |
|
SU1388735A1 |
| Устройство для динамической балансировки лучом лазера роторов | 1982 |
|
SU1043499A1 |
| АНАЛОГО-ЦИФРОВОЙ ПРЕОБРАЗОВАТЕЛЬ УГЛА | 1996 |
|
RU2115229C1 |
1.ИЗМЕРИТЕЛЬНОЕ УСТРОЙСТВО К БАЛАНСИРОВОЧНОМУ СТАНКУ по авт. св. СССР № , о т л и,ч а ю:щ ее с я тем, что, с целью повышения надежности, оно снабжено блоком контроля лопаток. 2. Устройство по п. 1, отличающееся тем, что блок кон-. троля .лопаток выполнен в виде первого и второго четырехразрядных двоичных счетчиков, счетный вход первого из которых соединен с выходом датчика лопаток первого измерительного канала, а счетный вход второго - с выходом датчика лопаток второго измерительного канала, дополнительного формирователя импульсов, выход которого соединен с предустановочными входами обоих четырехразрядных двоичных счетчиков, первого и второго логических элементов 4И, каждьй из.входов которых соединен соответственно с выходами первого и второго четырехразрядных двоич. ных счетчиков, второго и третьего триггера,.С -входы которых соединены между собой, с выходом генератора « опорного сигнала и с входом доСП полнительного формирователя, а D -входы которых соединены соответственно с выходами первого и второго логических элементов 4И, дополнительного логического элемента 2И, первый вход которого соединен с выходом второго триггера, а второй вход - с выходом третьего триггера и светодиода, подключенного к выходу дополнительного логического элемента 2И. 
| Измерительное устройство к балансировочному станку | 1981 |
|
SU981834A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Измерительное устройство к балансировочному станку | 1983 |
|
SU1096511A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
