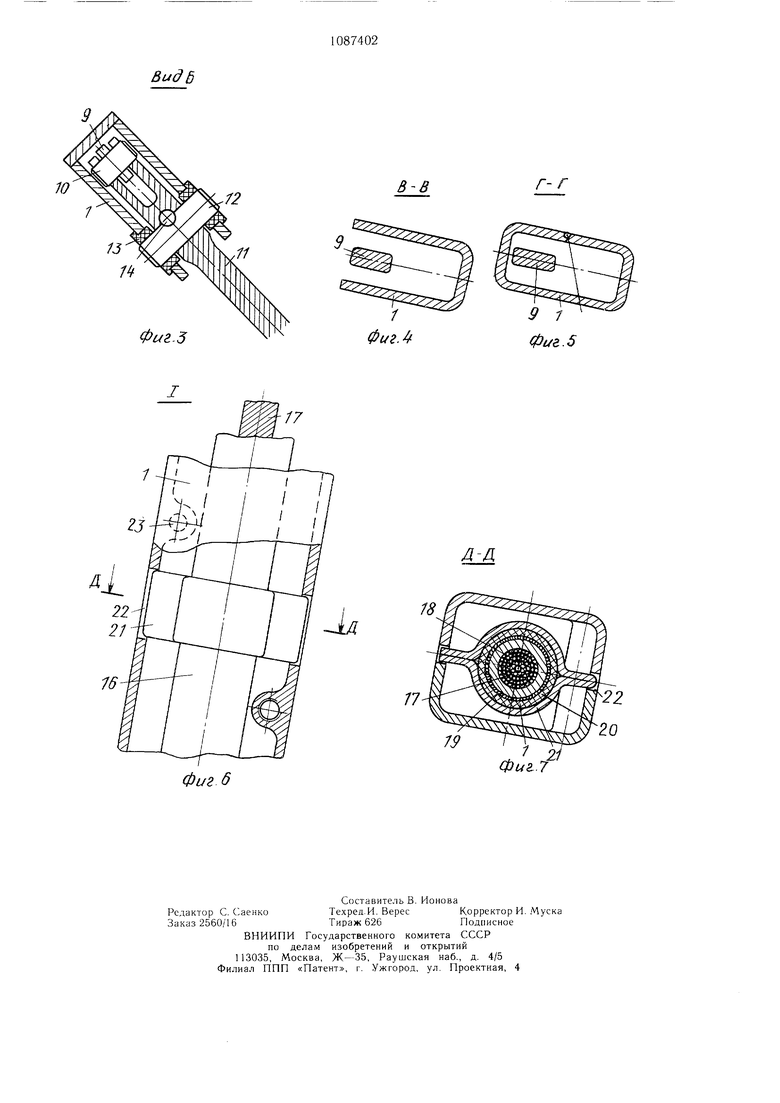
Изобретение относится к тракторостроению, а именно к механизмам управления поворотом тракторов, преимущественно гусеничных, оборудованных, например, планетарными механизмами новорота. Известен механизм управления поворотом транспортного средства, содержащий два снабженных рукоятками рычажных органа управления, связанных с валами независимых приводов правого и левого бор тов 1. Однако известная конструкция не удовлетворяет требованию ГОСТа 12.2.019-76 п. 3.3 по расположению рукояток механизма поворота, согласно которому рукоятки должны располагаться в регламентированной зоне, в частности должны быть приближены к водителю на расстояние 300-600 мм. Однако такое приближение рычагов к водителю нарушает удобство входа и посадки (так как рычаги при этом располагаются в зоне расположения ног водителя. Приближение к водителю рукояток рычагов при сохранении неизменным удаленного положения оси их качания ухудшает траекторию движения рукояток, делает ее крутопадающей. При этом происходит несовпадение естественного для водителя (тянущего в направлении на себя) управляющего воздействия с направлением траектории, что может привести к повшенной утомляемости водителя. Кроме того, при крутопадающей траектории длина рабочего хода рукояток рычагов оказывается ли.митированной упором рукояток в бедренную часть ног водителя и может оказаться недостаточной для реализации управляющего воздействия, а также помещать воздействию ног па педаль управления. Цель изобретения - повыпдение удобст ва управления. Поставленная цель достигается тем, что в механизме управления поворотом транспортного средства, содержащем два снабжепных рукоятками рычажных органа управления, связанных валами независимых приводов правого и левого бортов, каждый рычажный орган управления представляет собой плоский щарнирный четырехзвенник, одно из звеньев которого закреплено неподвижно, а противолежащее ему зве-но выполнено с консолью, на которой закреплена рукоятка. Кроме того, одно из звеньев четырсхзвенника, смежное неподвижному звену, выполнено П-образного поперечного сечения а другое расположено внутри первого. При этом, звено, расположенное внутри звена П-образного поперечного сечения, может быть выполнено гибким и установлено с возможностью возвратно-поступательного движения в оболочке, жестко закрепленной на звене П-образного сечения и повторяющей его форму. На фиг. 1 изображена передняя часть кабины транспортногО уст)ойства, продольный разрез, со щитком приборов, в основа1П-1и к()то)огс)-соосио ;5акиепле ы механизмы управления, показа щыс н двух крайних положениях; на фиг. 2 -- вид Л па фиг. 1; на фиг. 3 вид Б на-фиг. 1; на сриг, 4 сечение В В на фпг. 1; па фи о - сечение Г-Г на фиг. 1; на фиг. 6 - узел 1 на фи;-. 1; на фиг. 7 разрез Е-К iia фи1 ii. Устройство состоит из коромысла 1 П-образного или коробчатого сечении, закрепленного на оси 2, расположенной выще уровня пола 3 вблизи )с:дней стенки 4 кабины и закрепленной в осповаяии 5 щитка б приборов соосно с неда;1Я 1 7, Ближе к передней стенке и несколько расположена ось 8 ;;оромысла 9, так же закрепленная к основсиппо М1ита и iipnборов. Коромысло 9 )ас11о..и)жено внутри профиля коромьсла 1 и coejuiiiciiri шарниром 10 своего верхнего конца с iiuirynox 11. который представляет собой двуплечий рычаг, П1арнирпо закрепленный с полклцыо оси 12, (капроновых) ВТУЛОК 13 ;-, штифта 14 относительно коромысла 1. На длинном плече (патуна, направленном в сторону водите.тя, закреплена рук{) 15 :равления, а малое плечо выполнено :, и;:дс ии.-;ки, в разрез которой зходпт всрхщл; коиен. коромысла 9, щарнирно cotvUiiieiiHOio с liiaтуном 11 шарниром 10. Коромысло расположено внутри профиля коромысла i (фиг.. В случае наличия небольшой ДЛИЕТЫ хода коромысел, когда их относительные 1еремещсния невелики, может оказаться конструктивно возможным и целесообразным выполнение коромысла 1 замкнутого коробчатого сечения, что повыщает его жесткость и y. шает внешний вид. При другом вариан е кон1:т;)К1 никого исполнения устройства (фиг. oj королысло 1 также нмест ко)обчатое сечение, lio это сечение уменынено благо;,аря TOW. что второе коромысло выпо.анспо в в1-де гнбкого звена 16, 1 редстан;и1Ю1це1() с)бой. нанример, многожилы;| ;й тоос 17 в сле1-,;;альной оплетке ;8, зак;1ючс П1ЫЙ в армированную оплеткой 19 обол; чк 2(), из кгторой закреплены обжатием скобы 21, с 1|Омощ К) которых оболочка закреплена еподвижно к пазах 22, выпо-шснных н полоз П1ах профиля коромысла 1, сое;. собой винтами (НС показянь), : ходяП.ими в отверстие 23. При эток: гибкое звено 16 нолностью повторяет С)о|)л;у коромысла 1, которое в это.м случае .к;жет б1)1ть изог1-1 то в больщей степени. Т)ос 17 гибкого звена соверн1ает возвратно-юстх ;;ате.льиос движение в оболочке, осуществляя связь шарнира 10 П1атуна 11 с осью 8, при УСЛОВИИ сохранения 11еизменным расстояния между ними при движении KopoMi,ic:ia 1 вок)уг оси 2, г.е. кинематически эквивйлептеи жесткому KOpoMbic.iy 9.
Устройство работает следующим образом.
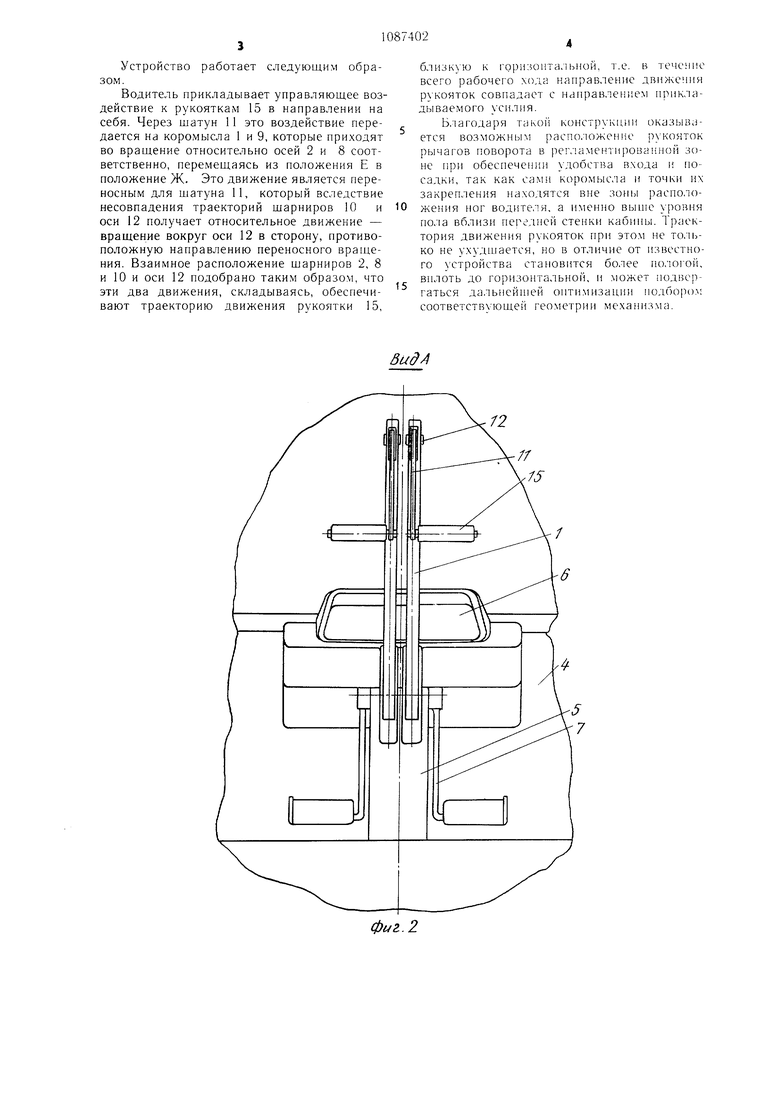
Водитель прикладывает управляющее воздействие к рукояткам 15 в направлении на себя. Через щатун 11 это воздействие передается на коромысла 1 и 9, которые приходят во вращение относительно осей 2 и 8 соответственно, перемещаясь из положения Е в положение Ж. Это движение является переносным для щатуна 11, который вследствие несовпадения траекторий шарниров 10 и оси 12 получает относительное движение - вращение вокруг оси 12 в сторону, противоположную направлению переносного вращения. Взаимное расположение шарниров 2, 8 и 10 и оси 12 подобрано таким образом, что эти два движения, складываясь, обеспечивают траекторию движения рукоятки 15,
близкую к горизонта,1ьион, т.е. в течение всего рабочего хода направление движения рукояток совпадает с направлением прикладываемого усилия.
Благодаря TaKoii конструкции оказывается возможным расположение рукояток рычагов поворота в рег, аментированной зоне при обеспечении удобства в.хода li посадки, так как сами коромысла и точки их закрепления находятся вие зон1)1 расположения ног водителя, а именно вып1е уровня пола вблизи передней стенки кабины. Траектория движения рукояток при это.м не только не ухуд1иается, но в отличие от известного устройства становится более пологой, вилоть до горизонтальной, и может подвергаться дальнсйп1ей опти.мизации 11одбор().: соответствуюпгей геометрии механизма.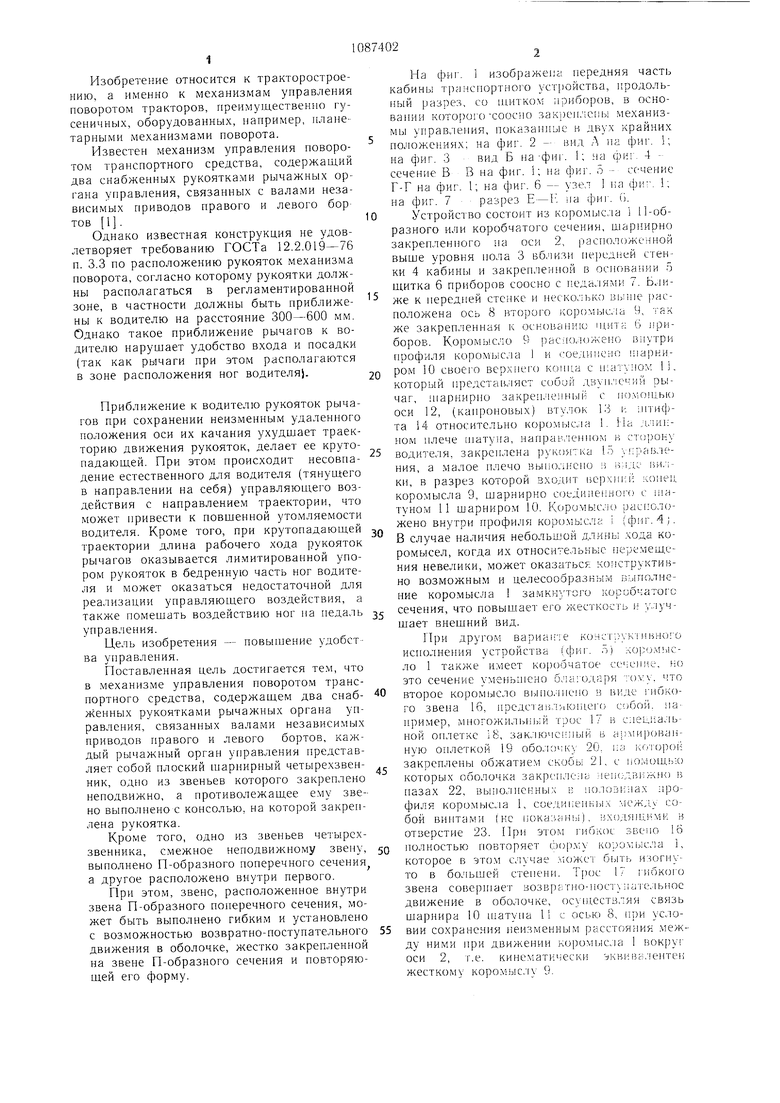
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство управления транспортным средством | 1984 |
|
SU1273285A1 |
| Сочлененное транспортное средство | 1986 |
|
SU1357299A1 |
| Рулевая колонка транспортного средства | 1984 |
|
SU1197910A1 |
| Сцепное устройство сочлененного трактора | 1986 |
|
SU1425098A1 |
| УСТРОЙСТВО УПРАВЛЕНИЯ ДЛЯ ТРАНСПОРТНОГО СРЕДСТВА, СПОСОБ ЭКСПЛУАТАЦИИ УКАЗАННОГО УСТРОЙСТВА, А ТАКЖЕ ТРАНСПОРТНОЕ СРЕДСТВО, СОДЕРЖАЩЕЕ ДАННОЕ УСТРОЙСТВО | 2008 |
|
RU2478168C2 |
| ПРИВОД УПРАВЛЕНИЯ ДВИЖЕНИЕМ ТРАНСПОРТНОГО СРЕДСТВА | 1995 |
|
RU2105689C1 |
| МАШИНА ТРАНСПОРТИРОВКИ И ОПРОКИДЫВАНИЯ КОВШЕЙ | 2014 |
|
RU2587123C2 |
| Моделирующее устройство для синтеза рычажных механизмов | 1980 |
|
SU932529A1 |
| САМОКАТ | 2012 |
|
RU2520634C1 |
| Велосипед - тренажер | 1990 |
|
SU1754563A1 |
1. МЕХАНИЗМ УПРАВЛЕНИЯ ПОВОРОТОМ ТРАНСПОРТНОГО СРЕДСТВА, содержащий два снабженных рукоятками рычажных органа управления, связанных с валами независимых приводов правого и левого бортов, отличающийся тем, что, с целью повышения удобства управления, каждый рычажный орган управления представляет собой плоский шарнирный четырехзвенник, одно из звеньев которого закреплено неподвижно, а противолежащее ему звено выполнено с консолью, на которой закреплена рукоятка. 2.Механизм по п. 1, отличающийся тем, что одно из звеньев четырехзвенника, смежное неподвижно.му звену, выполнено П-образного поперечного сечения, а другое расположено внутри первого. 3.Механизм по пп. 1 и 2, отличающийся тем, что звено, расположенное внутри звена П-образного поперечного сечения, выполнено гибким и установлено с возможностью возвратно-поступательного движения в оболочке, жестко закрепленной на звене П-образного сечения и повторяющей его форму. (Л 00 о IvD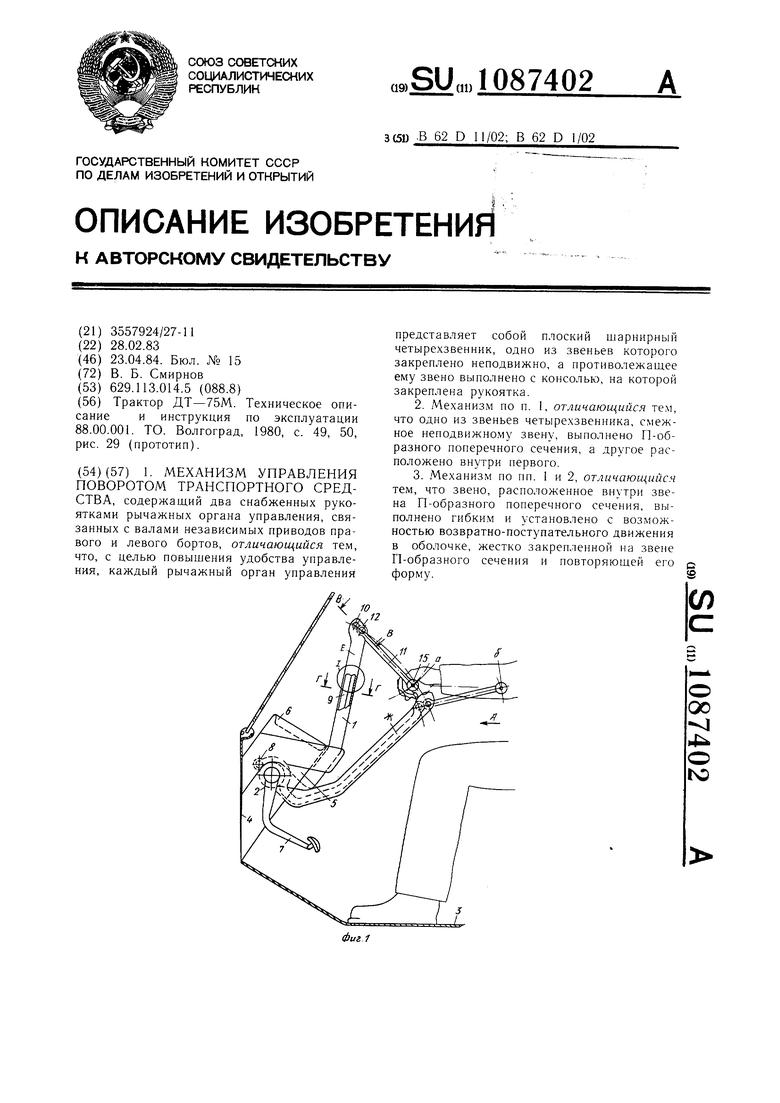
//
/
Фи2..2
В ид Б
г- г
в-в
Фиг 6
Л-Л
| Фальцовая черепица | 0 |
|
SU75A1 |
| Шланговое соединение | 0 |
|
SU88A1 |
| ТО | |||
| Волгоград, 1980, с | |||
| Способ смешанной растительной и животной проклейки бумаги | 1922 |
|
SU49A1 |
| Солесос | 1922 |
|
SU29A1 |
