лограф с отклоняющимися пластинами, которые электрически связаны через переключатель режимов с движками косинусных потенциометров и потенциометрического датчика, закрепленного на четырехзвеннике, и установленный на кулисе линейной потенциометрический датчик, движок которого электрически связан с питающим концами косинусных потенциометров и закреплен на ее ползуне, при этом кулиса расположена в прорези третьего дугообразного рычага и в пересечении прорезей взаимно перпендикулярных рычагов.
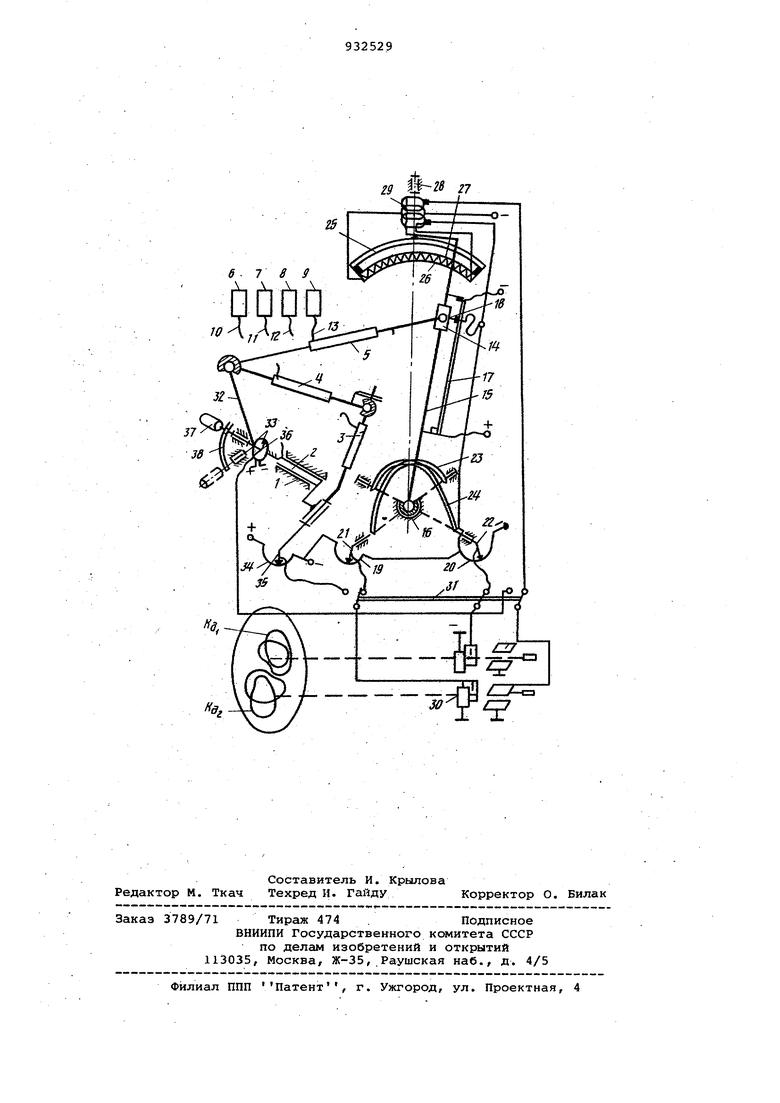
На чертеже изображено схематически моделирующее устройство для синтза рычажных механизмов.
Мрделирующее устройство содержит модуль пространственного направляющго механизма в виде установленного в корпусе 1 шарнирного четырехзвеннка, состоящего из регулируемых по длине звеньев 2-5 посредством гидрозадатчиков 6-9 соединенных с ними гибкими шлангами 10-13. Устройство содержит кулисную пару пятого класса с ползуном 14 и с кулисой 15, соединенной с корпусом 1 шаровой парой 16 третьего класса, закрепленный на кулисе 15 линейный потенциометр 17, движок 18 которого механически связан с полузном 15, косинусные потенциометры 19 и 20, движки 21 и 22 которых механически связаны с горизонтально расположен ными осям вращения двух взаимно перпендикуляр ных дугообразных рычагов 23 и 24 с п родОЛЬ ными проре з ими. Питающие концы потенциометров 19 и 20 соединены со средней точкой (с движком 18) потенциометра 17, В пересечении прорезей дугообразных рычагов 23 и 24 размещена кулиса 15, свободный конец: которой расположен в продольной прорези дугообразного рычага 25, на котором установлен третий косинусный потенциометр 26 с движком 27, механически связанньм со свободным концом кулисы 15. На оси 28 вращения рычага 25 установлен коллектор 29, через кольца которого выведены три провода от потенциометра 26. Один из питающих проводов этого потенциометра также соединен со средней точкой потенциометра 17, Движки потенциометров 19, 20 и 26 электрически соединены с отклоняющими пластинами двухлучевого осциллографа 30 через переключатель 31 режимов.
Кривошип 32 и коромысло 2 на своих осях вращения имеют линейные потенциометрические датчики 33 и 34, движки 35 и 36 которых через переключатель 31 режимов соединены с отклонякадими пластинами двухлучевого осциллографа 30. Моделирующее
устройство приводится в движение электроприводом 37, установленным с возможностью перемещения в горизонтальной плоскости на 90° по направляющим 38.
Действие устройства происходит в четырех режимах: направляющий механизм , передаточный механизм для пространственной модели и направляющий механизм , передаточQ ный механизм - для плоской модели. Работа устройства в режиме на- правляющий механизм для пространственной модели.
Заданы координаты на кальке. Требуется синтезировать пространственный направляющий механизм с помощью предлагаемого устройства.
Для этого координаты пространственной кривой, заданной графиками
0 f(xi,Z f(у), накладывают на экран двухлучевого осциллографа 3Q, включают электропитание и электропривод 37, переключатель 31 режимов ставят в положение направляющий механизм , при этом на экране двухлучевого осциллографа 30 наблюдают две действительные кривые - Кд,Кд, проектируемые электронными лучами осциллографа 30, и кривые, заданные; упомянутыми графиками. Манипулируя рукоятками гидрозадатчиков 6-9, изменяют длину звеньев четырехзвенника и тем самым изменяют форму пространственной кривой, описываемой центром 14 и 15 , при этом расстояние между кинематическими парами кулисы 15 разлагается на проекции косинусными потенциометрами 19, 20 и 26, со средних точек которых снимаются напряжения, пропорциональные величинам этих проекций на отличающие пластины осциллографа 30. Манипуляции рукоятки гидрозадатчиков 6-9 прекращают после наиболее полного совпадения образа попарно сопряженных кривых на экране, т.е. действительных и заданных, при этом стрелки рукояток гидрозгшатчиков 6-9 укажут нам на шкалах соответствующие параметры в виде длин звеньев, а углы давления между звеньями определяются при установке привода 37 во всех точках на самой модели при соответствующих длинах звеньев.
Таким образом, нахождение всех параметров произведено автоматизированной Работа рычагов 23 и 24 заключается в повороте их кулисой 15 вокруг своих осей пропорционально углу поворота кулисы 15 вокруг каждой соответствующей оси.
Работа рычага 25 заключается в повороте его на комплексный угол относительно вертикальной оси, кроме) того, он позволяет выявить угол отклонения кулисы 15 от вертикали
5 и косинусным потенциометром 26, установленным на нем, позволяет выя вить косинус этого угла и выдать его значение на отклоняющие пластины осциллографа 30. Работа устройства в режиме пер даточный механизм для пространственной модели. Задана функция на графике, требуется автоматизированно определить по ней параметры передаточного меха низма. Для этого переключатель 31 режимов ставят в положение передаточный механизм и накладывают график функции на экран осциллограф 30. Манипулируют рукоятками гидрозадатчиков 6-8 до полного совпадения образов графиков действительной и заданной функции на экране осциллог рафа 30, после чего стрелки гидроэадатчиков 6-8 укажут параметры моделируемого механизма. Работа устройства в режиме направляющий механизм плоской модели Ось вращения электропривода 37 устанавливается параллельно оси вра щения коромысла 2 по направляющим 3 так, чтобы кривошип 32 и коромысло 2 вращалисьв одной плоскости, при этом шаровая пара кривошипа 32 выполняет роль вращательной пары пятого класса. Переключатель 31 режиMOB ставят в положение направляющий механизм . На экран осциллогра фа 30 устанавливают график шатуннрй К5)ивой, вьшолненной на кальке, и повторяют все действия, указанные д режима пространственного механизма. Отличие в работе заключается только в том, что движение одного рычага 2 приостанавливается, а рычаг 25 теряет свое движение вокруг вертикаль ной оси. Работа устройства в режиме передаточный механизм пространствен ной модели с той лишь разницеи,что оси кривошипа 32 и коромысла 2 долж ны быть приведены в параллельное положение, а кривошип 32 и коромысло 2 должны вращаться в одной плоскости. Предлагаемое моделирующее устрой ство позволяет синтезировать как плоский, так и пространственный направляющий или передаточный механиз на одном и том же устройстве автома тизированно, т.е. без составления алгоритма синтеза и его решения руч ным способом или на ЭВМ, а значит без дополнительный затрат времени. Формула изобретения Моделирующее устройство для синтеза рычажных механизмов, содержащее установленные в корпусе шарнирный четырехзвенник с регулируемыми по длине звеньями, на одном из которых закреплен потенциометрический датчик, и средства для изменения длины звеньев, отлич ающеес я тем, что, с целью автоматизации синтеза рычажных механизмов и расширения функциональных возможностей путем синтеза как плоских, так и пространственных рычажных механизмов, оно имеет кулису с ползуном, связанным с выходным эвеном шарнирного четырехзвенника, шарнирно установленные в корпусе два взаимно перпендикулярных дугообразных рычага с продольньлли прорезями и с горизон-. тально расположенными пересекающимися осями вращения, третий дугообразный рычаг с продольной прорезью и с вертикально расположенной осью вращения, пересеканнцейся с осями вращения взаимно пЪрпендикулярных рычагов, связанную с одним из концов кулисы шаговую пару третьего класса с центром, лежащим в точке пересечения осей вращения дугообразных рычагов, три косинусных потенциометра, движок одного из которых кинематически связан со свободным концом кулисы, а движки двух других соответственно соединены с осями вращения взаимно перпендикулярных рычагов, переключатель режимов, двухлучевой осциллогр аф с отклоняющими пластинами, которые электрически связаны через переключатель режимов с движками косинусных потенциометров, и потенциометрическогр датчика, закрепленного на четырехзвеннике, и установленный на кулисе линейный потенциометрический датчик, движок которого электрически связан с питающими концами косинусных потенциометров и закреплен на ее ползуне, при этом кулиса расположена в прорези третьего дугообразного рычага и в пересечении прорезей взаимно перпендикулярных рычагов. Источники информации, принятые во внимание при экспертизе 1t Авторское свидетельство СССР 138411, кл. G 06 В 7/68, 1961 (прототип).
Кд
гд П-28 27
| название | год | авторы | номер документа |
|---|---|---|---|
| Моделирующее устройство для синтеза шарнирно-рычажных механизмов | 1980 |
|
SU1239733A1 |
| СПОСОБ ОЦЕНКИ КОЭФФИЦИЕНТА ПЕРЕДАЧИ ЦЕПИ ПОТЕНЦИОМЕТРИЧЕСКОЙ ОБРАТНОЙ СВЯЗИ РУЛЕВОГО ПРИВОДА УПРАВЛЯЕМОГО СНАРЯДА И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2002 |
|
RU2236668C2 |
| Моделирующее устройство для синтеза пространственных рычажных механизмов | 1980 |
|
SU1040511A1 |
| РЫЧАЖНЫЙ ВАРИАТОР | 2011 |
|
RU2467227C1 |
| ПЛОСКАЯ ШАРНИРНАЯ КУКЛА "РУССКАЯ БАЛЕРИНА" | 1992 |
|
RU2071374C1 |
| Механизм отклонения иглы швейной зигзаг машины | 1978 |
|
SU765426A1 |
| "Устройство для шлифования гнутых деталей из древесины "Адзура" | 1990 |
|
SU1776223A3 |
| Ремизоподъемная каретка для ткацкого станка | 1979 |
|
SU1285083A1 |
| Привод игольного двухфонтурной основовязальной машины | 1975 |
|
SU557132A1 |
| Привод игол двухфонтурной основовязальной машины | 1973 |
|
SU473774A1 |