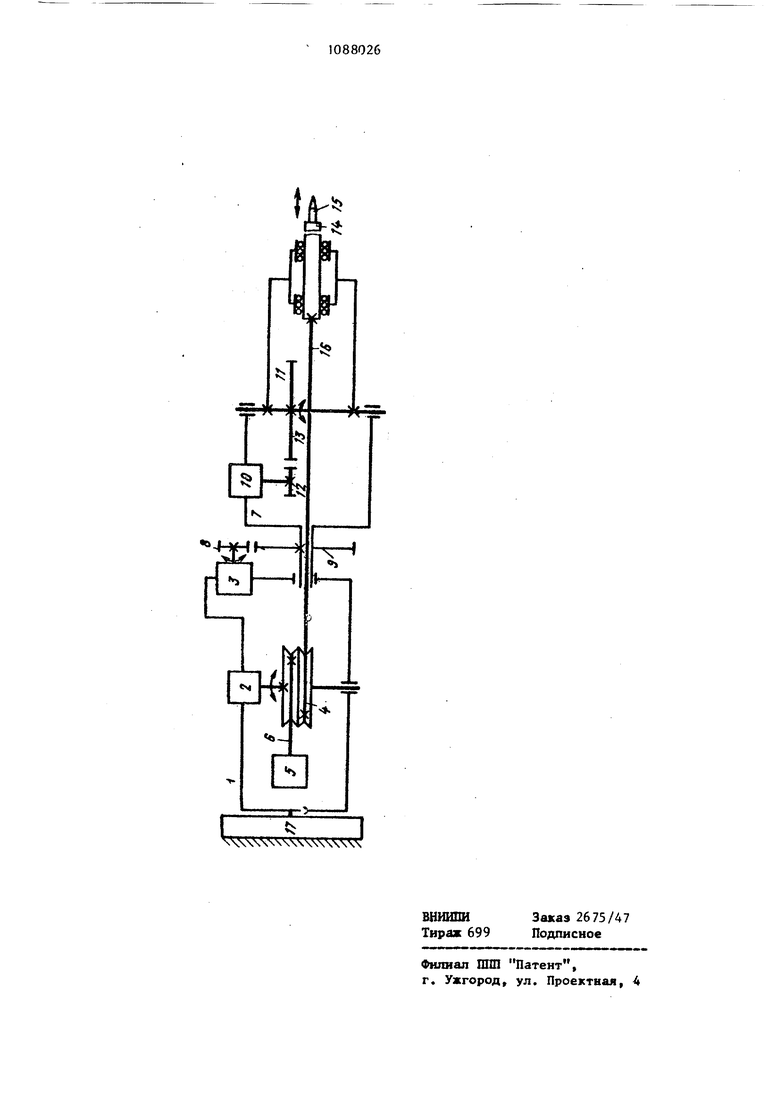
Изобретение относится к автомати ке и вычислительной технике и может быть использовано в системах автоматизированного проектирования cлoжныk трехмерных объектов. Известно устройство для считывания объемной трехмерной информации - координатно-измерительная ма шина, содержащая станину,i- продольные направляющие, вертикальные опоры, поперечную направляющую каретку, перемещающуюся по поперечной направляющей, и штатив со щупом, перемещаю дийся в каретке. t Недостатками устройства являются громоздкость,неудобство в работе и неприспособленность для оперативного считывания объемной информации. Наиболее близким по технической сущности к изобретению является устройство для считывания координат точек поверхностей, входящее в состав автоматизированной системы проектирования объемных изделий,состоя щее из плиты, выполненной из стабил ного и устойчивого к внешним воздей ствиям металла. На поверхности пли ты имеются взаимно перпендикулярные направляющие пазы, выполненные с большой степенью точности. Подвижно основание устанавливается на плите таким образом, что имеет возможност перемещаться вдоль пазов. В состав основания входят, датчики линейного перемещения, фиксирующие положение основания относительно гошты. На ос нований закреплена вертикальная ст ка, имекщая направляющие пазы. Стойка также изготавливается из стабильного и устойчивого к внешнш4 воздействиям металла.На стойке разм щена каретка, имеющая возможность перемещаться вдоль направляющих пазов стойки, причем эти перемещения фиксируются датчиком, входящим в состав каретки. В каретке размещена горизонтальная ось, имеющая направляю1цие пазы. Горизонтальная ось имеет возможность перемещаться вдол пазов относительно каретки, причем величина .этих перемещений фиксируется датчиком, входящим в состав каретки. Горизонтальная ось также изготавливается из стабильного и устойчивого к внешним воздействиям t erajina. На противоположном от каре ки конце оси размещен поворотный узел, имеющий возможность вращаться относительно оси. Величина поворота фиксируется датчиком. На по ворот-- ном узле размещен щуп, имеюпий возможность перемещаться вдоль собственной оси относительно поворотного узла. Величина этих перемещений фиксируется датчиком,входяшим в состав поворотного . Недостатками известного устройства являются его конструктивная сложность, заключающаяся в том,что оно содержит пять перемещающихся один относительно другого узлов и столько же датчиков перемещения,а также то,что он неудобен в работе, т.е. неприспособлен для оперативного считывания объемной информации.Это связано с необходимостью большого числа установок отдельных узлов,необходимых для фиксирования координат одной точки считывания. Цель изобретения - упрощение конструкции и пси тение быстродействия. Указанная цель достигается тем, что устройство для считывания координат точек объемных объектов,содержащее стойку,установленную на поите, поворотный узел,связанный с первым датчиком, содержит второй поворотный узел, ось вращения которого перпендикулярна к оси вращения первого поворотного узла, второй датчик, установленный на первом поворотном узле, третий датчик, щкив,трос,противовес и измерительный шток, установленный на втором поворотном узле с возможностью возвратно-поступательного движения,причем второй поворотный узел связан с вторым датчиком, третий датчик установлен на оси шкива,а измерительный шток связан посредством троса со шкивом и противовесом. На чертеже изображена структурная кинематическая схема предлагаемого устройства. Устройство содержит стойку I с размещенными на ней и зафиксированными относительно нее датчиками 2 и 3 типа угол-код, шкив 4 и противовес 5,причем ось шкива 4 связана с осью датчика 2, а противовес 5 связан со шкивом 4 посредством троса 6. На стойке 1 расположены первый поворотный узел 7 таким образом, что он имеет возможность поворота -относительно стойки 1 вокруг собственной оси вращения. Поворотный узел 7 кинематически связан с датчиком 3 зубчатой передачей, состоящей из шестерни 8,закрепленной на валу датчика 3 и зубчатого колеса 9,закрепленного на оси вращения поворот ного узла 7.На поворотном узле 7 размещен и засЬиксирован относительно него датчик 10 типа угол-код.Кро ме того,на нем расположены второй поворотный узел 11 таким образом,чт он имеет возможность поворота относительно поворотного узла 7 вокруг собственной оси вращения. Поворотный узел 1 кинематически связан с датчиком 10 зубчатой передаче состоящей из шестерни 12,закрепленной на оси датчика 10, и зубчатого колеса 13, закрепленного на оси вра щения поворотного узла 11. На поворотном узле 11 размещен измерительный шток 14 таким образом,что он имеет возможность возвратно-поступательного прямолинейного перемещения относительно поворотного узла П. На конце измерительного штока 1 расположен щуп 15,острие которого совмещают с точкой считывания объе ной информации в процессе работы.Из мерительный шток 14 соединен со шки вом 4 посредством троса 16,причем противовес 5 посредством троса 6 прикладывает к шкиву 4 крутящий момент таким образом,что трос 16 поддерживается в натянутом состоянии и измерительный шток 14 вывешивается Конструктивно устройство выполнено ким образом,что геометрическая ось ращения второго поворотного узла 1 перпенидкулярна геометрической оси вращения поворотного узла 7 и геометрической оси возвратно-поступательного движения измерительного штока 14,проходящей через острие щупа 15 и имеет с ним общую точку пересечения.Такая конструкция позв ляет производить считывание координат отдельных точек в сферической системе координат,центром которой является точка пересечения ука занных геометрических осей. Устройство устанавливается на некоторой базовой плите 17,на которой закрепляется и объемная деталь. Устройство работает следукв им -об разом. Оператор, держа рукой измеритель 1в11й шток 14 вблизи щупа 15,предварительно размещает острие послед не го в некоторую базовую точку объемной детали,относительно которой будет осуществляться дальнейший отсчет координат. При этом измерительный шток 14 и поворотные узлы 11 и 7 установятся в определенные положения, фиксируемые датчиками 2,10иЗ соответственно. Выходные коды всех датчиков поступают в электронный блок (не показан) , где они преобразуются в некоторые произвольные координаты х,у,2, определяег 1е взаимным положением стойки 1 и объемной детали.Эти координаты вводятся в память электронного блока. В дальнейшем, при считывании координат отдельных точек, на поверхности объемной детали электронный блок автоматически вычитает из координат,определяемых ВЫХОДЕШМИ кодами датчиков, координаты, хранящиеся в памяти. На выходе электронного блока,таким образом,будут присутствовать коорданаты x,y,z, измеренные относительно базовой точки объемной детали. Установка щупа в требуемую точку оператором возможна практически за одно движение, т.е. не требуются многократные перемещения отдельных частей устройства с целью установки щупа, как это наблюдается в известном устройстве. Это связано с применением всего трех подвижных одна относительно другой частей,причем два движения - вращательные,осуществляемые с минимумом потерь на трение и только одно - возвратнопоступательное. Таким образом,при перемещении щупа в нужную точку происходит одновременные вращения обоих поворотных узлов и движение измерительного штока, что позволяет оперативно производить считывание объемной информации. Технико-экономический эфйЬект от внедрения изобретения заключается в повышении удобства эксплуатации путем сокращения до минимума количест ва манипуляций,необходимых для установки щупа в нужную точку считывания,что повышает скорость считывания. Предлагаемое устройство проще известного,имеет минимально необхо;ф1мое количество перемещающихся частей и связанных с ниьм однотипffidx датчиков типа угол-код,выходная информация которых однозначно определяет положение точек считывания.
;;
I
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для определения координат точек поверхности криволинейной пространственной формы | 1986 |
|
SU1366862A1 |
| Устройство для определения координат точек криволинейной поверхности | 1990 |
|
SU1783278A1 |
| СПОСОБ ПРОДОЛЬНОЙ РАСПИЛОВКИ БРЕВЕН, УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ И КОМПЛЕКС ИЗМЕРИТЕЛЬНЫХ УСТРОЙСТВ ПО ЗАМЕРУ ПАРАМЕТРОВ БРЕВНА И ПИЛОМАТЕРИАЛОВ | 1993 |
|
RU2086407C1 |
| УСТРОЙСТВО ДЛЯ КОНТРОЛЯ ГЕОМЕТРИИ ПРОФИЛЯ ЛОПАТОК И СТЕРЖНЕЙ ОХЛАЖДАЕМЫХ ЛОПАТОК ТУРБИН | 2001 |
|
RU2205363C2 |
| ИЗМЕРИТЕЛЬНЫЙ ДАТЧИК КАСАНИЯ НА ДИФРАКЦИОННЫХ РЕШЕТКАХ | 2004 |
|
RU2276772C1 |
| КООРДИНАТНО-ИЗМЕРИТЕЛЬНАЯ МАШИНА ДЛЯ ОПРЕДЕЛЕНИЯ ПРОСТРАНСТВЕННЫХ КООРДИНАТ НА ОБЪЕКТЕ ИЗМЕРЕНИЯ, А ТАКЖЕ ПОВОРОТНО-НАКЛОННЫЙ МЕХАНИЗМ ДЛЯ ТАКОЙ КООРДИНАТНО-ИЗМЕРИТЕЛЬНОЙ МАШИНЫ | 2008 |
|
RU2451265C2 |
| Судовая аппарель | 1973 |
|
SU1207392A3 |
| УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ АМПЛИТУДНО-ФАЗОВОГО РАСПРЕДЕЛЕНИЯ ПОЛЯ АНТЕННЫ | 1991 |
|
SU1841106A1 |
| Устройство для контроля формы поверхности объекта | 1989 |
|
SU1714322A1 |
| Устройство для измерения изделий сложной формы | 1990 |
|
SU1758405A1 |
УСТРОЙСТВО ДЛЯ СЧИТЫВА ЩЯ КООРДИНАТ ТОЧЕК ОБЪЕМНЫХ ОБЪЕКТОВ, со держащее стойку, установленную на плите, поворотный узел, связанный с первым датчиком, отличающееся тем,что,с целыо повышения быстродействия и упрощения устройства, оно содержит второй повоРОТИ.1Й узел,ось вращения которого перпендикулярна к оси вращения первого поворотного узла, второй датчик, установленный на первом поворотном узле, третий датчик,шкив,трос, противовес и измерительный шток,установленный на втором поворотном г узле с возможностью возвратно-пос(А тупательного дга{жения, причем второй поворотный узел связан с вторым датчиком, третий датчик установлен на оси шкива, а измерительный шток связан посредством троса со шкивом и противовесом.
51Ж )
«-HlHb)
чД.
| I | |||
| Коордкнатно-измерительная машина (}ирмы Bendix, Проспект фирмы Bendix Согр-ФК 24783-78, ФК 32938-79, Techniaches Mes8en,tra, 1980, Heft 1,аЦА | |||
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Устройство для считывания объемной информации, фир1«л Tokyo Boeki Limited Проспект фирмы Tokyo Boeki, Япония ФК 20891-78 (прототип). | |||
