Изобретение относится к приспособлениям для измерения контуров или кривых, например, для измерения профилей сече- ний, и может быть использовано для моделирования эквидистантных поверхностей криволинейной пространственной формы, например, для определения координат эквидистантных формующих поверхностей гладильных подушек.
Существует способ моделирования на ЭЦВМ эквидистантных формующих поверхностей объемных гладильных подушек, согласно которому определение координат точек моделируемой поверхности производится по параметру эквидистантности Э, который в пространстве откладывается по нормали к поверхности к точке, координаты которой определяются.
Недостатком этого способа является большая трудоемкость вычислительных операций, связанная с программированием на ЭЦВМ.
Наиболее близким по техническому решению к предлагаемому устройству является устройство для определения координат точек поверхности криволинейной пространственной формы, содержащее основание с базовой плоскостью, размещенный на
N со
со к XI
00
основании узел базирования, направляющие, закрепленные на основании параллельно базовой плоскости, траверсу, установленную на направляющих с возможностью перемещения вдоль них и фиксации, установленную на траверсе с возможностью перемещения вдоль нее в направлении перпендикулярном направлению перемещения траверсы и фиксации каретку с размещенными на ней основным координатным механизмом и дополнительным, выполненными в виде корпуса, отсеченного узла, жестко закрепленного на корпусе, установленных на корпусе симметрично относительно оси отсчетного узла, перпендикулярно базовой плоскости основания и с возможностью осевого перемещения и фиксации двух щупов, одни концы которых предназначены для контактирования с изменяемой поверхностью, и преобразователя координат, шарнирно соединенного с корпусом и взаимосвязанного со вторыми концами щупов и отсчетным узлом (2),
Известный прибор характеризуется низкой точностью определения координат точек криволинейной поверхности.
Цель изобретения - повышение точности определения координат. Указанная цель достигается тем, что устройство для определения координат точек криволинейной поверхности, содержащее основание с базовой плоскостью, размещенный на основании узел базирования, направляющие, закрепленные на основании параллельно базовой плоскости, траверсу, установленную на направляющих с возможностью перемещения вдоль них и фиксации, установленную на траверсе с возможностью перемещения вдоль нее в направлении, перпендикулярном направлению перемещения траверсы и фиксации, каретку с размещенными на ней основным координатным механизмом и дополнительным, выполненным в виде корпуса, отсчетного узла, жестко закрепленного на корпусе, установленных на корпусе симметрично относительно оси отсчетного узла, перпендикулярно базовой плоскости основания и с возможностью осевого перемещения и фиксации двух щупов, одни концы которых предназначены для контактирования с измеряемой поверхностью, и преобразователя координат, шарнирно соединенного с корпусом и взаимосвязанного со вторыми концами щупов и отсчетным узлом, снабжено установленными на корпусе аналогично первым двум щупам третьим и четвертым щупами, одни1 концы которых предназначены для контактирования с измеряемой поверхностью, а другие взаимосвязаны с
преобразователем координат, выполненным в виде диска и установленного коакси- ально последнему и взаимосвязанного с ним стакана со шкалой на наружной цилиндрической поверхности, отсчетный узел взаимосвязан со стаканом, а диск соединен посредством шарового шарнира с корпусом и взаимосвязан со вторыми концами всех щупов.
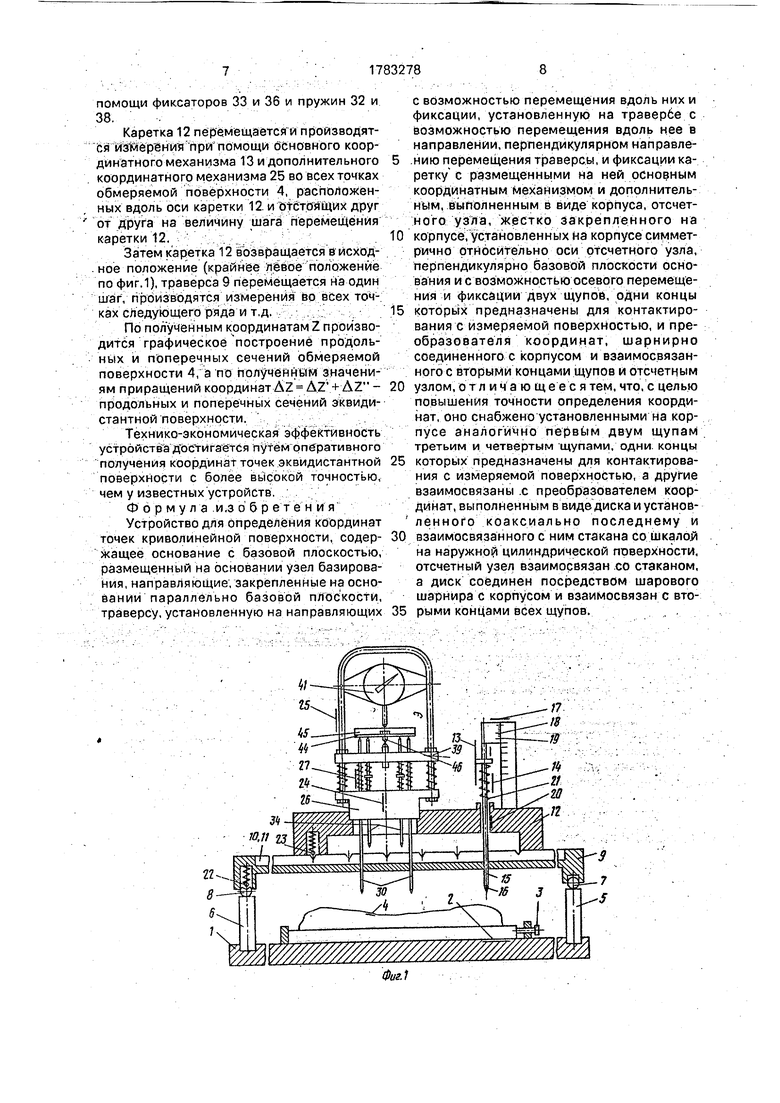
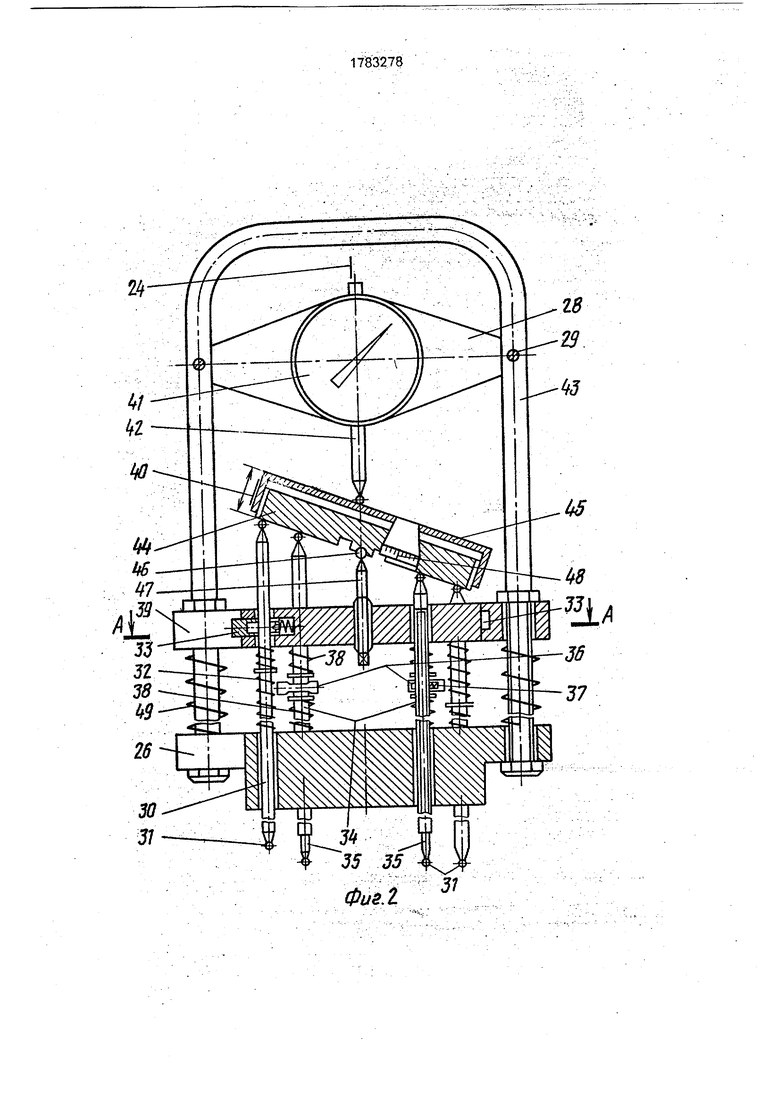
0 Сущность изобретения поясняется чертежами, где: на фиг.1 представлен общий устройства в разрезе по продольной оси каретки; на фиг.2 - общий вид дополнительного координатного механизма в рабочем
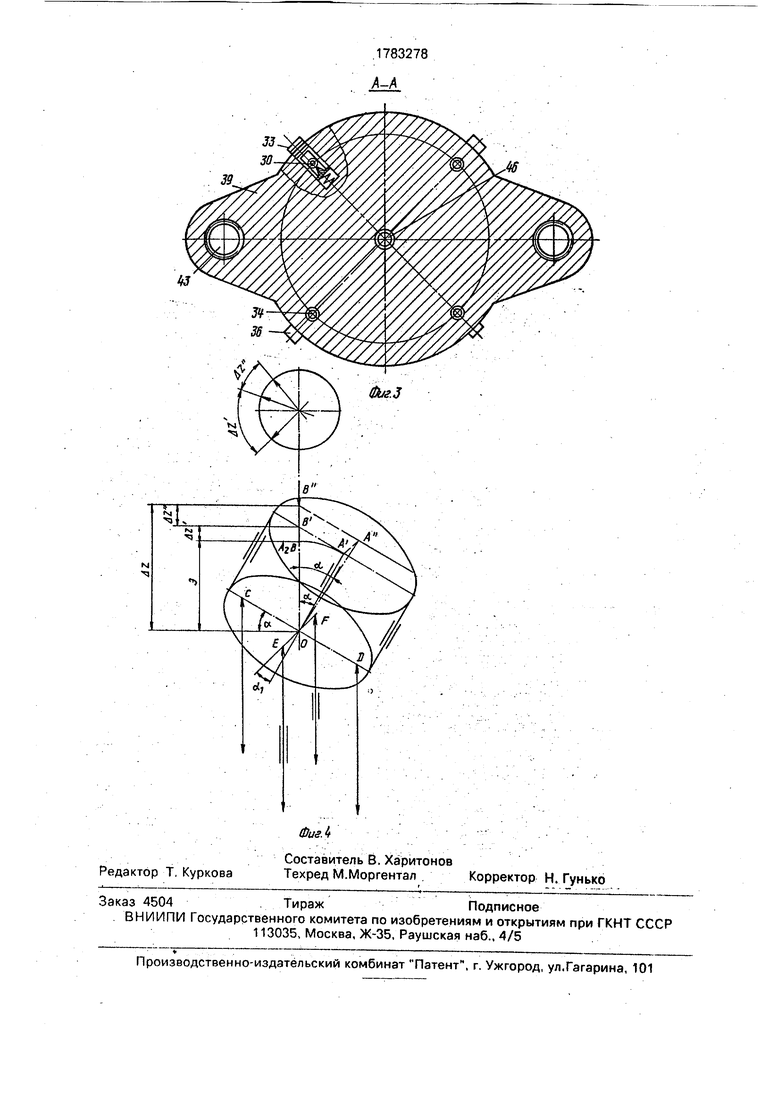
5 положении; на фиг.З - поперечный разрез по А-А на фиг.2; на фиг.4 - упрощенная схема преобразователя координат криволинейной поверхности в рабочем положениич Устройство состоит из основания 1 с
0 базовой плоскостью 2, на которой размещен узел базирования 3 поверхности заданной формы 4,
На основании 1 с помощью стоек 5 и 6 жестко закреплены параллельно базовой
5 плоскости направляющие 7 и 8. На направляющих установлена траверса 9 с возможностью перемещения вдоль них и фиксации, На траверсе 9 установлена с возможностью перемещения вдоль нее и фиксации по на0 правляющим 10 и 11 в направлении, перпендикулярном направлению перемещения траверсы каретка 12.
На каретке 12 размещен основной координатный механизм 13. Координатный ме5 ханизм 13 состоит из щупа 14 со штоком 15 и жалом 16, индикатора 17 положения жала 16, состоящего из корпуса 18-и шкалы 19. Шкала 19 жестко закреплена на каретке 12, а корпус 18 жестко связан со штоком 15,
0 который установлен с возможностью возвратно-поступательного перемещения в направлении, перпендикулярном базовой плоскости 2 основания 1 в цилиндрической направляющей 20 и подпружинен пружи5 ной 21.
Каретка 12 и траверса 9 снабжены фиксаторами 22 и 23, обеспечивающими их перемещение по направляющим 7,8 и 10,11 с заданным шагом.
0 На каретке 12 на расстоянии от оси щупа 14, кратном шагу перемещения каретки 12, установлен с осью 24 дополнительный координатный механизм 25, выполненный в виде корпуса 26, и регистратора координат
5 27, жестко закрепленного на корпусе 26 с узлами крепления 28 и 29. На корпусе установлены симметрично относительно оси 24 и перпендикулярно базовой плоскости 2 основания 1 с возможностью осевого перемещения и фиксации два щупа 30 с жалами 31,
контактирующими с измеряемой поверхностью 4. Щупы подпружинены по осям пружинами 32 и зафиксированы в определенном положении фиксаторами 33. На корпусе 26 установлены также еще два телескопических щупа 34 со штоками 35, фиксаторами 36 и прижимами 37, которые подпружинены по оси пружинами 38.
Регистратор координат 27 состоит из корпуса 26, платформы 39, преобразователя координат 40 и отсчетного узла 41 с измерительным стержнем 42, П-образного каркаса 43.
Отсчетный узел 41 закреплен на П- образном каркасе 43. Преобразователь координат 40 состоит из диска 44 и установленного коаксиально последнему и взаимосвязанного с ним стакана 45. Преобразователь координат установлен на платформе 39 с помощью шарнира 46 и стойки 47 с возможностью совершения качатель- ных движений вокруг шарнира 46. Стакан 45 имеет шкалу 48 на наружной цилиндрической поверхности.
Стакан 45 взаимосвязан с отсчетным
узлом 41. Диск 44 соединен посредством
шарового шарнира 46 и стойки 47 с корпу сом и взаимосвязан с верхними концами
всех щупов 30 и 34.
Устройство работает следующим образом.
Обмеряемая поверхность заданной формы 4 устанавливается и закрепляется в узле 3 крепления и базирования. Перемещением стакана 45 по резьбе диска 44 с помощью шкалы 48 устанавливается требуемый параметр эквидистантности. Траверса 9 устанавливается таким образом,чтобы щуп 14 занял положение над точкой поверхности 4, принятой за начальную точку измерений. Определяется вертикальная координата точки поверхности 4 относительно начального положения щупа 15, Для этого щуп 14 по направляющей 20 опускается до соприкосновения жала 16 с поверхностью 4, производится отсчет координаты Z по шкале 19 и корпусу 18. Возврат щупа 14 в исходное положение осуществляется при помощи пружины 21. Затем каретка 12 перемещается по направляющим 10 и 11 на заданный шаг с помощью устройства 23 и измеряется вертикальная координата Z следующей точки поверхности 4. При перемещении каретки 12 по направляющим 10 и 11 на расстояние, равное расстоянию между осью щупа 14 и осью 24 дополнительного координатного механизма 25, она займет положение, при котором ось 24 пройдет через начальную точку измерений, В этом по- ложении производится определение
величины координаты AZ точки поверхности, эквидистантной обмеряемой поверхности 4. Для этого дополнительный координатный механизм 25 из исходного 5 положения, при котором точка А пересечения верхней плоскости стакана 45 и оси преобразователя координат 40 и точка В контакта этой плоскости с измерительным стержнем 42 совпадают и преобразователь
0 координат 40 расположен параллельно базовой плоскости 2, а точки С, D, Е и F контактов щупов 30 и 34 с диском 44 может в плоскости, перпендикулярной оси 24, переводится в рабочее положение. Регистратор
5 координат 27 при нажатии на фиксаторы 33 и освобождении щупов 30 по стойкам 43 опускается до положения, при котором жала 31 щупов 30 соприкасаются с обмеряемой поверхностью 4. При наличии кривизны об0 меряемой поверхности 4 щупы 30 займут положение, при котором плоскость, в которой лежат точки С, D и О, а следовательно, и нижняя плоскость диска 44 отклоняется на некоторый угол а от исходного положения.
5 Верхняя плоскость стакана 45 также отклонится на угол а . Точка А переместится в положение А1, а точка В - в положение В . Измерительный стержень 42 получит перемещение AZ . величина которого определя0 ется по отсчетному узлу 41 и составляет приращение координаты AZ по сравнению с параметром эквидистантности Э. Фиксаторы 33 опускаются, зафиксировав это положение преобразователя координат 40,
5 регистратор координат 27 по стойкам 43 поднимается в исходное положение. Затем нажатием на фиксаторы 36 тока 35 щупов 34 опускаются ниже щупов 30 и фиксируются в этом положении фиксаторами 36, Регистра0. тор координат 27 вновь опускается до соприкосновения штоков 35 с обмеряемой поверхностью 4. Щупы 34 займут положение, при котором плоскость, в которой лежат точки Е, F и О, а, следовательно, и
5 нижняя плоскость диска 44 отклоняется на некоторый дополнительный угол а. Верхняя плоскость стакана 45 также отклонится на дополнительный угол а и из- мерительный стержень 42 получит
0 дополнительное перемещение, величина которого определяется по отсчетному узлу 41 и составляет дополнительное приращение координаты AZ по сравнению с параметром эквидистантности и приращением
5 .координаты AZ , полученным на предыдущем этапе измерений.
Возврат регистратора координат 27 в исходное положение осуществляется при помощи пружин 49, щупов 30 и 34 - при
помощи фиксаторов 33 и 36 и пружин 32 и 38.
Каретка 12 перемещается и производятся измерения при1 помощи основного координатного механизма 13 и дополнительного координатного механизма 25 во всех точках обмеряемой поверхности 4, расположенных вдоль оси каретки 12 и отстоящих друг от друга на величину шага перемещения каретки 12.
Затем каретка 12 возвращается в исходное положение (крайнее левое положение по фиг.1), траверса 9 перемещается на один шаг, производятся измерения во всех точках следующего ряда и т.д.
По полученным координатам Z производится графическое построение продольных и поперечных сечений обмеряемой поверхности 4, а по полученным значениям приращений координат AZ AZ + AZ - продольных и поперечных сечений эквидистантной поверхности.
Технико-экономическая эффективность устройства Достигается путем оперативного получения координат точек эквидистантной поверхности с более высокой точностью, чем у известных устройств.
Формула изобретения
Устройство для определения координат точек криволинейной поверхности, содер- жащее основание с базовой плоскостью, размещенный на основании узел базирования, направляющие, закрепленные на основании параллельно базовой плоскости, траверсу, установленную на направляющих
с возможностью перемещения вдоль них и фиксации, установленную на траверсе с возможностью перемещения вдоль нее в направлении, перпендикулярном направлению перемещения траверсы, и фиксации каретку с размещенными на ней основным координатным механизмом и дополнительным, выполненным в виде корпуса, отсчет- ного узла, жестко закрепленного на корпусе, установленных на корпусе симметрично относительно оси отсчетного узла, перпендикулярно базовой плоскости основания и с возможностью осевого перемещения и фиксации двух щупов, одни концы которых предназначены для контактирования с измеряемой поверхностью, и преобразователя координат, шарнирно соединенного с корпусом и взаимосвязанного с вторыми концами щупов и отсчетным узлом, отличающееся тем, что, с целью повышения точности определения координат, оно снабжено установленными на корпусе аналогично первом двум щупам третьим и четвертым щупами, одни концы которых предназначены для контактирования с измеряемой поверхностью, а другие взаимосвязаны с преобразователем координат, выполненным в виде диска и установленного коаксиально последнему и взаимосвязанного с ним стакана со шкалой на наружной цилиндрической поверхности, отсчетный узел взаимосвязан со стаканом, а диск соединен посредством шарового шарнира с корпусом и взаимосвязан с вторыми концами всех щупов.
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для определения координат точек поверхности криволинейной пространственной формы | 1986 |
|
SU1366862A1 |
| Устройство для измерения размеров сварных соединений | 1990 |
|
SU1710985A1 |
| Устройство для пробивки отверстий в листовых заготовках | 1972 |
|
SU445497A1 |
| КООРДИНАТНО-ИЗМЕРИТЕЛЬНАЯ МАШИНА ДЛЯ ОПРЕДЕЛЕНИЯ ПРОСТРАНСТВЕННЫХ КООРДИНАТ НА ОБЪЕКТЕ ИЗМЕРЕНИЯ, А ТАКЖЕ ПОВОРОТНО-НАКЛОННЫЙ МЕХАНИЗМ ДЛЯ ТАКОЙ КООРДИНАТНО-ИЗМЕРИТЕЛЬНОЙ МАШИНЫ | 2008 |
|
RU2451265C2 |
| Устройство для измерения размеров трубы | 1990 |
|
SU1747862A1 |
| Шагомер для гребных винтов | 1987 |
|
SU1469334A1 |
| СПОСОБ ВЫЯВЛЕНИЯ АНОМАЛИЙ ЗУБОЧЕЛЮСТНОЙ СИСТЕМЫ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1999 |
|
RU2157137C1 |
| СПОСОБ ИЗМЕРЕНИЯ НЕПЛОСКОСТНОСТИ МНОГОСЛОЙНЫХ КОМПОЗИТНЫХ ПАНЕЛЕЙ | 2019 |
|
RU2727548C1 |
| КООРДИНАТНОЕ ИЗМЕРИТЕЛЬНОЕ УСТРОЙСТВО | 1985 |
|
SU1840370A1 |
| Шпиндельный узел деревообрабатывающего станка | 1982 |
|
SU1058776A1 |
Изобретение относится к приспособлениям для измерения контуров или кривых, например, для измерения профилей сечений и может быть использовано для моделирования поверхностей пространственной фермы, например,-для определения координат формующих поверхностей гладильных подушек. Цель изобретения - повышение точности определения координат. Для достижения указанной цели устройство снабжено установленными на корпусе аналогично первым двум щупам третьим и четвертым щупами, одни концы которых предназначены для контактирования с измеряемой поверхностью, а другие взаимосвязаны с преобразователем координат, выполненным в виде диска и установленного коаксиально последнему и взаимосвязанного с ним стакана со шкалой на наружной цилиндрической поверхности, от- счетный узел взаимосвязан со стаканом, а диск соединен посредством шарового шарнира с корпусом и взаимосвязан со вторыми концами всех щупов. 4 ил. (Л С
24
Фи&.1
33
| Моделирование на ЭЦВМ эквидистантных поверхностей объемных гладильных подушек | |||
| В.Г.Шуметов и др | |||
| Автоматизированные системы управления технологическими процессами легкой промышленности | |||
| Сб | |||
| научн | |||
| трудов МТИЛП, М., 1985, с.50-54 | |||
| Устройство для определения координат точек поверхности криволинейной пространственной формы | 1986 |
|
SU1366862A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
