/7
-i--«
00 05
а
00
о
ГС
по которым пере- с координатным
Изобретение относится к измерительной технике и может быть использовано для моделирования эквидистантных поверхностей криволинейной прост ранственной формы.
Целью изобретения является расширение функциональных возможностей путем определения координат точек поверхности криволинейной пространственной формы, эквидистантной заданной поверхности.
На фиг.1 изображено устройство, продольный разрез; на фиг.2 - разрез А-А на фиг.1; на фиг.З - схема регистратора координат эквидистантной заданной поверхности, исходное положение;, на фиг.4 - то же, рабочее положение.
Устройство состоит из основания 1 с базовой плоскостью 2, на которой находится узел 3 крепления и базирования поверхности 4 заданной формы.
На основании 1 с помощью стоек 5 и 6 жестко закреплены направляющие
7и 8, параллельные базовой плоскости 2 основания 1. Направляющее 7 и
8несут траверсу 9 с параллельными базовой плоскости 2 основания 1 направляющими 10 и 11,
мещается каретка 12 механизмом 13.
Координатный механизм 13 состоит из щупа 14 со щтоком 15 и жалом 16, индикатора 17 положения жала 16, состоящего из нониуса 18 и щкалы 19. Шкала I9 жестко закреплена на каретке 12, а нониус 18 жестко связан со щтоком 15, который установлен с возможностью возвратно-поступательного перемещения в направлении, перпендикулярном базовой плоскости 2 основания 1 в цилиндрических направляющих 20 и подпружинен пружиной 21.
Каретка 12 и траверса 9 снабжены узлами 22 и 23, обеспечиваюпщми их перемещение по,направляющим 10, 11 и 7, 8 с заданным щагом. На каретке 12 на расстоянии от оси щупа 14, кратном шагу перемещения каретки 12 установлен с возможностью поворота вокруг оси 24, перпендикулярной базовой плоскости 2 основания 1, дополнительный координатный механизм 25, состоящий из корпуса 26 и регистратора 27 координат эквидистантной заданной поверхности.
В цилиндрических равноудаленнь:х от оси 24 поворота дополнительного
Г
0
0
координатного механизма 25 направляющих 28 и 29 корпуса 26 установлены с возможностью возвратно-поступательного движения в направлении, перпендикулярном базовой плоскости 2 основания 1, два щупа 30 и 31 со щто- ками 32 и 33 и жалами 34 и 35, которые подпружинены по оси пружинами 36 и 37.
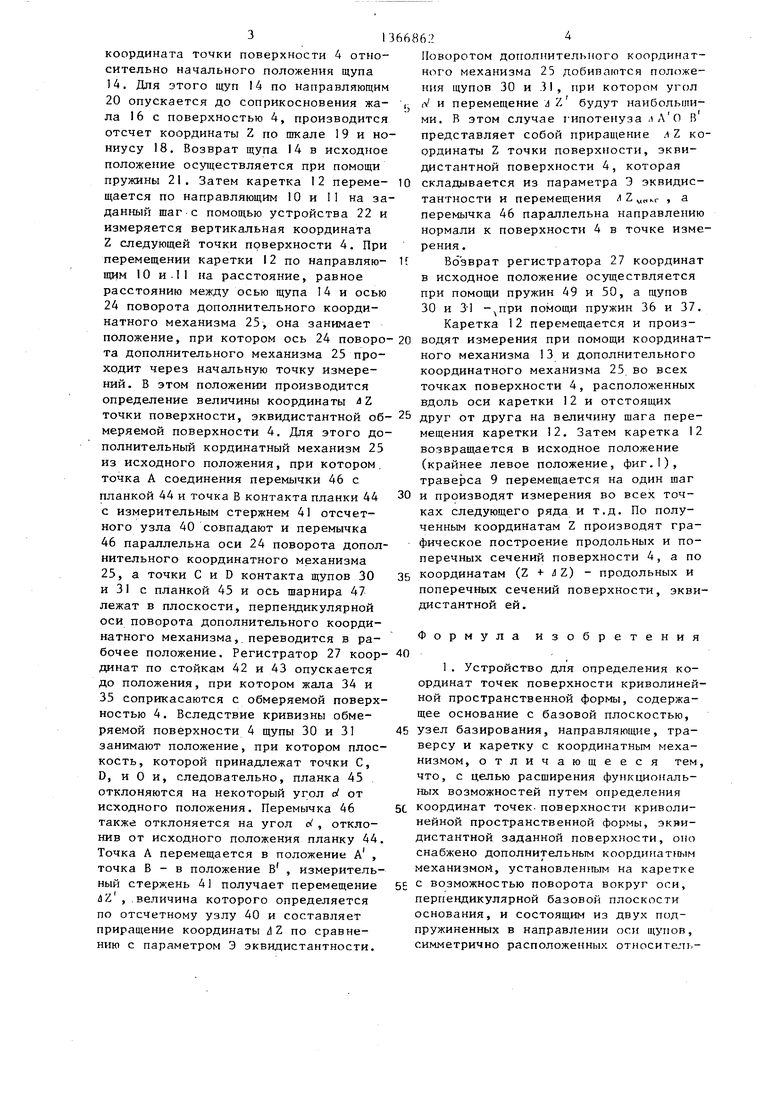
Регистратор 27 координат состоит из П-образного каркаса 38, преобразователя 39 координат и отсчетного узла 40 с измерительным стержнем 41 и установлен с возможностью возвратно-поступательного перемещения в направлении, перпендикулярном базовой плоскости 2 основания 1 при помощи П-образного каркаса 38 на стойках 42 и 43, жестко закрепленных в корпусе 26.
Отсчетный узел 40 установлен в каркасе 38. Преобразователь 39 координат , состоящий из двух планок 44 и 5 45, соединенных перемычкой 46, установлен на каркасе 38 при помощи шарнира 47 с возможностью совершения качатепьных движений вокруг оси, па- раллельной базовой плоскости 2 основания 1 таким образом, что он взаимодействует планкой 44 с измерительным стержнем 41, а планкой 45 - со щупами 30 и 31 .
Длина перемьики 46, жестко связанной с планкой 45, регулируется по длине перемещением вдоль оси перемычки 46 планки 44, которая фиксируется на перемычке 46 винтом 48.
Между П-образным каркасом 38 и корпусом 26 на стойках 42 и 43 установлены пружины 49 и 50.
Ось шарнира 47 совпадает с плос- костью, по которой щупы 30 и 31 взаимодействуют с планкой 45 преобразователя 39 координат.
Устройство работает следующим образом.
Обмеряемая поверхность заданной формы 4 (например, гладильная подушка с объемной формующей поверхностью) устанавливается и закрепляется в узле 3 крепления и базирования. Перемещением планки 44 по перемычке 46 устанавливается требуемый параметр Э эквидистантности. Траверса 9 устанавливается таким образом, чтобы щуп 14 занял положение над точкой поверхности 4, принятой за начальную точку измерений. Определяется вертикальная
5
0
45
50
55
координата точки поверхности 4 относительно начального положения щупа 14. Для этого щуп 14 по направляющим 20 опускается до соприкосновения жа- ла 16 с поверхностью 4, производится отсчет координаты Z по шкале 19 и нониусу 18. Возврат щупа 14 в исходное положение осуществляется при помощи пружины 21. Затем каретка 12 переме- щается по направляющим 10 и 11 на заданный шаг с помощью устройства 22 и измеряется вертикальная координата Z следующей точки поверхности 4. При перемещении каретки 12 по направляю- щим 10 и. 11 на расстояние, равное расстоянию между осью щупа 14 и осью 24 поворота дополнительного координатного механизма 25, она занимает положение, при котором ось 24 поворо та дополнительного механизма 25 проходит через начальную точку измерений. В этом положении производится определение величины координаты Л2
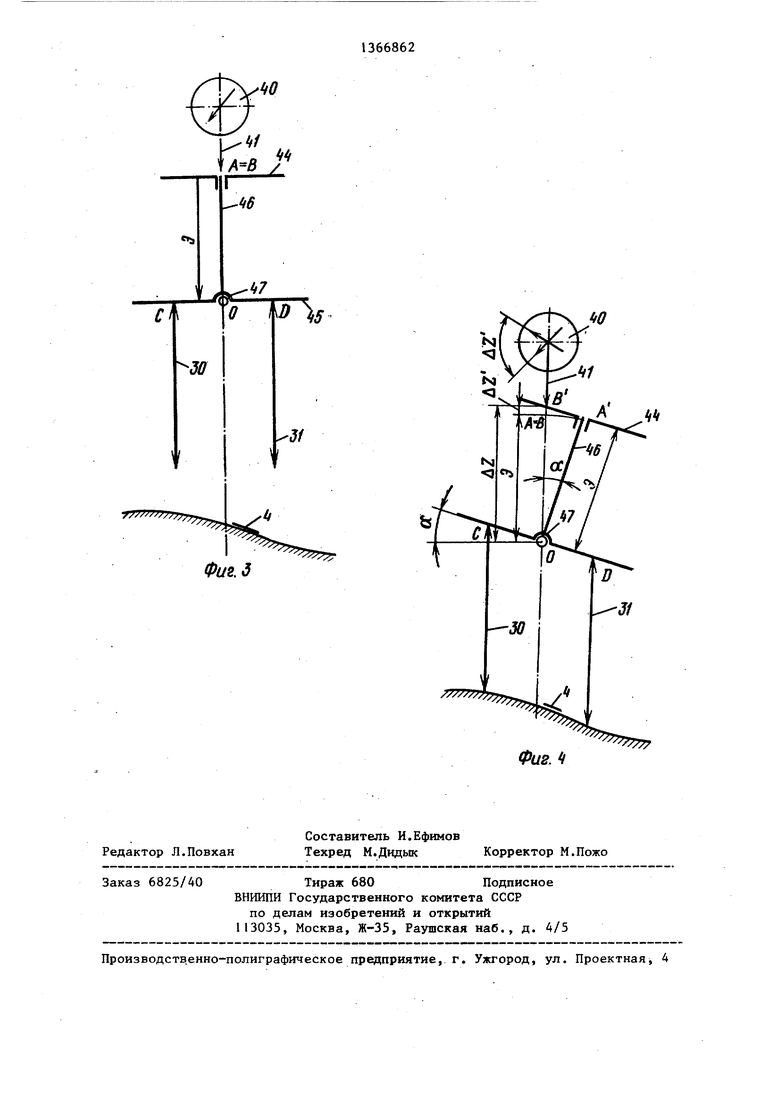
Поворотом дополнительного координатного механизма 25 добиваются положения щупов 30 и 31, при котором угол (V и перемещение л Z будут наибольшими. В этом случае гипотенуза и Л О В представляет приращение л Z координаты Z точки поверхности, эквидистантной поверхности 4, которая складывается из параметра Э эквидистантности и перемещения , а перемычка 46 параллельна направлению нормали к поверхности 4 в точке измерения.
Во зврат регистратора 27 координат в исходное положение осуществляется при помощи пружин 49 и 50, а щупов 30 и 3-1 помощи пружин 36 и 37.
Каретка 12 перемещается и производят измерения при помощи координатного механизма 13 и дополнительного координатного механизма 25 во всех точках поверхности 4, расположенных вдоль оси каретки 12 и отстоящих
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для определения координат точек криволинейной поверхности | 1990 |
|
SU1783278A1 |
| Способ контроля профиля зубьев зубчатого колеса и устройство для его осуществления | 1980 |
|
SU1025340A3 |
| Устройство для автоматизированного контроля соосности и центровки механических конструкций | 2016 |
|
RU2639993C1 |
| Способ контроля профиля зуба зубчатых колес и устройство для его осуществления | 1980 |
|
SU1145938A3 |
| Автоматическая установка для присоединения проволочных выводов | 1985 |
|
SU1312869A1 |
| КООРДИНАТНО-ИЗМЕРИТЕЛЬНАЯ МАШИНА ДЛЯ ОПРЕДЕЛЕНИЯ ПРОСТРАНСТВЕННЫХ КООРДИНАТ НА ОБЪЕКТЕ ИЗМЕРЕНИЯ, А ТАКЖЕ ПОВОРОТНО-НАКЛОННЫЙ МЕХАНИЗМ ДЛЯ ТАКОЙ КООРДИНАТНО-ИЗМЕРИТЕЛЬНОЙ МАШИНЫ | 2008 |
|
RU2451265C2 |
| СПОСОБ ОБРАБОТКИ РЕЗАНИЕМ ИЗДЕЛИЯ С ПОВЕРХНОСТЬЮ СЛОЖНОГО ПРОФИЛЯ И ФУНКЦИОНАЛЬНЫМ СЛОЕМ ПОНИЖЕННОЙ ЖЕСТКОСТИ ПОСРЕДСТВОМ МНОГОФУНКЦИОНАЛЬНОГО ПРОГРАММНО-АППАРАТНОГО КОМПЛЕКСА | 2010 |
|
RU2446033C1 |
| Монокомпаратор | 1982 |
|
SU1057783A1 |
| Двухкоординатный стол | 1979 |
|
SU781008A1 |
| Микромоментомер | 1979 |
|
SU838447A1 |
Изобретение относится к измерительной технике. Цель изобретения - расширение функциональных возможностей за счет определения координат точек эквидистантной заданной поверхности. Устройство имеет координатный механизм 13, состоящий из щупа 14 со штоком 15 и жалом 16, индикатора 17 положения жала 16. Индикатор 17 име- .л ет корпус 18 и шкалу 19, жестко закрепленную на каретке 1.2. Корп ус 18 жестко связан со штоком 15. Дополнительный координатный механизм 25 состоит из корпуса 26, регистратора координат, имеющего П-образный каркас, преобразователя координат и отсчетно- го узла 40. Преобразователь координат состоит из двух планок 44 и 45, соединенных перемычкой 46, и установлен на П-образном каркасе при помощи шарнира. Планка 44 взаимодействует с измерительным стержнем отсчетного узла 40, а планка 45 - со щупами 30 и 31. Перемещением планки 44 регулируется длина перемычки 46. Перемещая каретку 12, при помощи координатного механизма 13 производят измерение поверхности 4, а дополнительным координатным механизмом 25 определяют величину координаты Z точки поверхности, эквидистантной заданной поверхности 4. I з.п. ф-лы, 4 ил.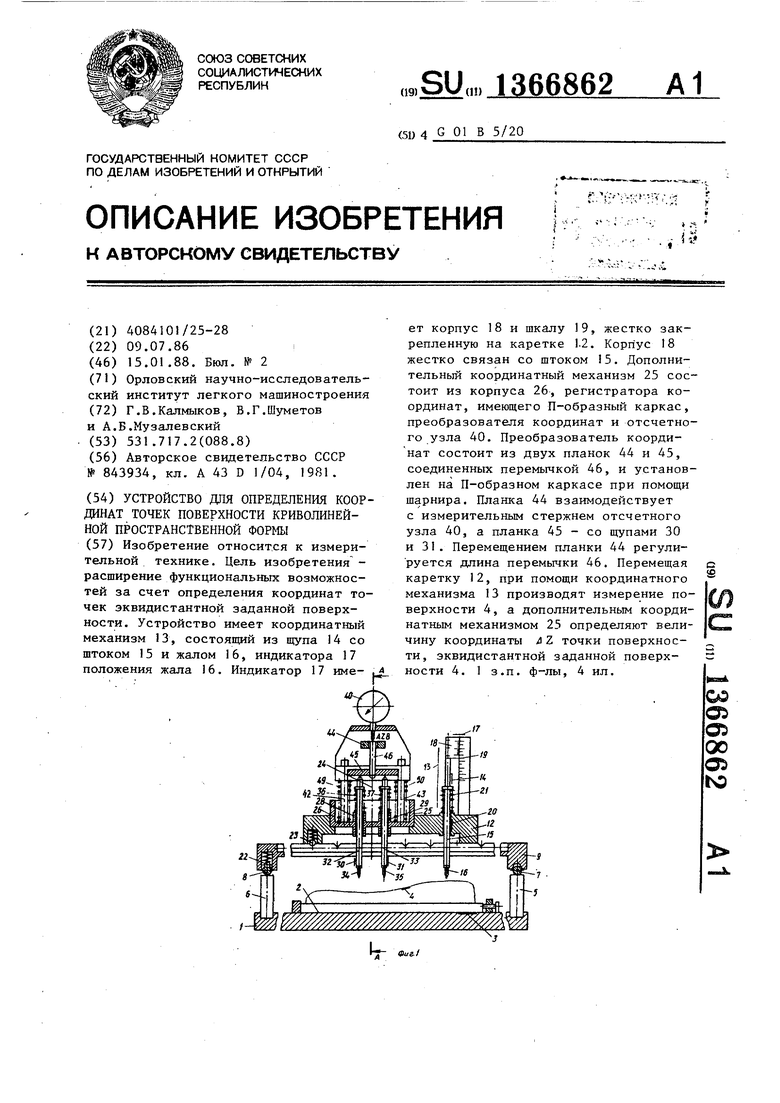
30
точки поверхности, эквидистантной об- 25 друг от друга на величину шага перемещения каретки 12. Затем каретка 12 возвращается в исходное положение (крайнее левое положение, фиг.1), траверса 9 перемещается на один шаг и производят измерения во всех точках следующего ряда и т.д. По полученным координатам Z производят графическое построение продольных и поперечных сечений поверхности 4, а по координатам (Z + /i Z) - продольных и поперечных сечений поверхности, эквидистантной ей.
Формула изобретения
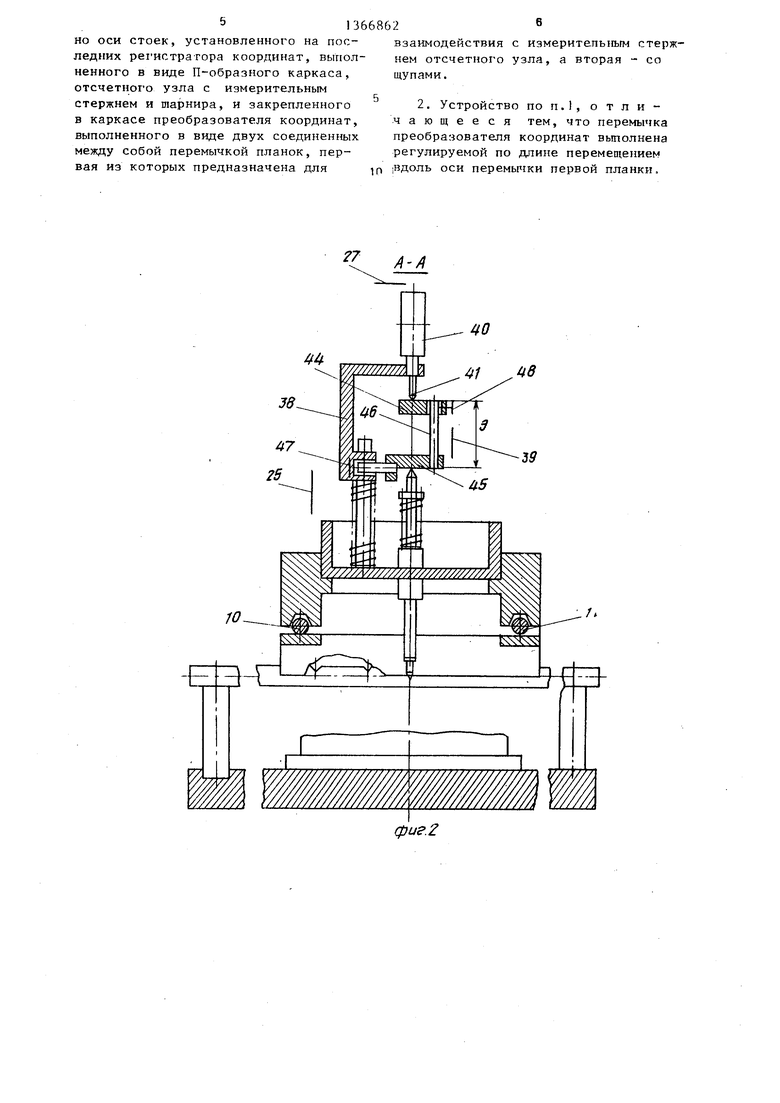
меряемой поверхности 4. Для этого до- полнительньш кординатный механизм 25 из исходного положения, при котором, точка А соединения перемычки 46 с планкой 44 и точка В контакта планки 44 с измерительным стержнем 41 отсчет- ного узла 40 совпадают и перемычка 46 параллельна оси 24 поворота дополнительного координатного механизма 25, а точки С и D контакта щупов 30 и 31 с планкой 45 и ось шарнира 47 лежат в плоскости, перпендикулярной оси поворота дополнительного координатного механизма,. переводится в рабочее положение. Регистратор 27 координат по стойкам 42 и 43 опускается до положения, при котором жала 34 и 35 соприкасаются с обмеряемой поверхностью 4. Вследствие кривизны обмеряемой поверхности 4 щупы 30 и 31 занимают положение, при котором плоскость, которой принадлежат точки С, D, и О и, следовательно, планка 45 отклоняются на некоторый уг;ол о от исходного положения. Перемычка 46 также отклоняется на угол с , отклонив от исходного положения плаНку 44. Точка А перемещается в положение А , точка В - в положение В , измерительный стержень 41 получает перемещение 4Z , .величина которого определяется по отсчетному узлу 40 и составляет приращение координаты UZ по сравнению с параметром Э эквидистантности.
35
40
45 узел базирования, направляющие, траверсу и каретку с координатным механизмом, отличающееся тем, что, с целью расщирения функциональ- возможностей путем определения
5С координат точек- поверхности криволинейной пространственной формы, эквидистантной заданной поверхности, оно снабжено дополнительным координатным механизмом, установленьштм на каретке
55 с возможностью поворота вокруг оси, перпендикулярной базовой плоскости основания, и состоящим из двух подпружиненных в направлении оси щунов, симметрично расположенных относитель30
25
25
35
40
45 узел базирования, направляющие, траверсу и каретку с координатным механизмом, отличающееся тем что, с целью расщирения функциональ- возможностей путем определения
5С координат точек- поверхности криволинейной пространственной формы, эквидистантной заданной поверхности, оно снабжено дополнительным координатным механизмом, установленьштм на каретке
55 с возможностью поворота вокруг оси, перпендикулярной базовой плоскости основания, и состоящим из двух подпружиненных в направлении оси щунов, симметрично расположенных относительно оси стоек, установленного на последних регистратора координат, выполненного в виде П-образного каркаса, отсчетнрго узла с измерительным стержнем и шарнира, и закрепленного в каркасе преобразователя координат, выполненного в виде двух соединен шх между собой перемычкой планок, первая из которых предназначена для
4
38
взаимодействия с измерителыгым стержнем отсчетного узла, а вторая - со щупами.
2, Устройство по п.1, о т л и - чающееся тем, что перемычка преобразователя координат вьтолнена регулируемой по длине перемеп1ением |Вдоль оси перемьпки первой планки.
A-/I
фиг.2
О
D V
-30
-J/
Фи2.3
.««
Фи8. «
| Прибор для контроля формы обувных колодок | 1979 |
|
SU843934A1 |
| Зубчатое колесо со сменным зубчатым ободом | 1922 |
|
SU43A1 |
