Стойка установлена с возможностью регулирования ее положения по длине неподвижного основания, а электроконтактные элементы установлены с возможностью регулирования их положения относительно стойки. Перед контролем профилей однотипных деталей производится предварительная настройка устройства по эталонному образцу. С этой целью эталонная деталь крепится в узле крепления контролируемой детали, и блок измерительных стержней с очень малой скоростью доводится до касания с упором. В момент касания все измерительнь е стержни оказываются в контакте с эталонной деталью. Затем с помощью винта стойка перемещается к блоку до касания наиболее выступающего из измерительных стержней с соответствующими электроконтактными элементами. Момент контакта регистрируется на табло многомерного блока индикации. Далее последовательно производится регулировка положения остальных электроконтактных элементов путем приведения их в соприкоснoвe иe с соответствующими измерительными стержнями. После этого стойка с помощью винта отводится от блока с измерительными стержнями на некоторое минимальное расстояние, достаточное для установки и снятия эталонной детали.
Далее контроль профиля деталей происходит следующим образом. Контролируемая деталь устанавливается в узле крепления контролируемой детали. Блок измерительных стер.жнёй перемещается из исходного положения к детали до касания упора. При этом все измерительные стержни оказываются в контакте с деталью и побторяют ее профиль. Далее блок со стержнями перемещается к стойке с электроконтактными элементами. По мере перемещения блока к стойке связанный с блоком датчик положения вырабатывает импульсы, пропорциональные текущему перемещению блока. В моменты контактовобратнцх концов измерительных стержней С соответствующими им электроконтактными элементами п блок индикации поступают сигналы, фиксирующие перемещение блока стерхсней. При этом в блоке индикации происходит запоминание информации о перемещении измерительных стержней, по которой судят о профиле контролируемой дйталй и его отклонении от эталонного профиля..
1 При этом все контролируемые точки измеряются каждая своей парой измерительный стержень - электроконтактный элемент и датчиком положения блока стержней. В известном устройстве срабатывание контактов, измерение положения блока стержней и фиксация его координат на табло индикации также происходит последовательно и, следовательно, производительность измерени низка. Устройство производит измерение профиля лишь в одной плоскости, т.е. устройство не универсально, не обеспечивает измерения пространственных форм, следовательно, номенклатура контролируемых объектов узка. Кроме того, измерение контактным способом - через промежуточные стержни и косвенно - через положение промежуточного блока посредством датчика снижает надежность, точность измерения. Помимо того, дополнительные составляющие части устройства - подвижный блок с измерительными стержнями, датчик положения этого блока также снижают надежность и усложняют конструкцию устройства. Наиболее близким по технической сущности к изобретению является устройство для контроля профиля пера лопаток, состоящее из двух основных узлов: специального измерительного приспособления и регистрирующего устройства.
Специальное измерительное приспособление включает в себя зажимное приспособление и измерительную головку,, изготавливаемые для каждого типа лопаток. Проверяемую лопатку закрепляют за хвост. Измерительная головка состоит из Двух раскрывающихся щек, через которые пропущены расположенные в четыре ряда измерительные щупы,, обеспечивающие одновременно контроль пера лопатки в четырех сечениях, и предназначена для контроля профиля и ширины пера на хорде. Постоянство взаимного расположения щек обеспечивается фиксатором (упором). Настройка измерительной головки производится по эталонной лопатке.
Регистрирующее .устройство представляет собой блок индикации, выполненный в виде приборного щита, каждый из показывающих приборов которого связан с соответствующим измерительным щупом. Недостаток иэвестного устройства заключается в том, что измерительная головка изготавливается для каждого типа лопаток, поэтому устройство не может обеспечить контроля ряда изделий (при этом не обеспечивает объемного контроля изделий, не позволяет измерять крутые и сложные профили), а для контроля крупногабаритных изделий требуется масса измерительных щек.
Целью изобретения являете расширение номенклатуры контролируемых объектов за счет использования его для контроля
поверхности объектов различных типоразмеров и форм и повышение надежности.
Представленная цель достигается тем, что вустройстве для контроля формы поверхности объектов, содержащем основание, измерительный блок с преобразователями перемещений, привод перемещения измерительного блока, узел крепления контролируемого объекта к основанию, упор для фиксации положения измерительного блока и блок индикации, связанный с измерительными преобразователями перемещений, измерительный блок выполнен в виде направляющих, связанных t основанием посредством жестко связанной с ними оси, закрепленной на основании с возможностью поворота, ползунов, установленных на cooтвeтctвyющиx направляющих с возможностью перемещения по ним, Ц1токов„ размещенныхперпендикулярно
направляющим с возможностью перемещения вдоль своей оси в соответствующих ползунах втулок, закрепленных на соответствующих штоках, размещенных с возможностью перемещения в соответствующих втулках дополнительных штоков, на концах которых установлены соответствующие преобразователи перемещений. Измерительные преобразователи перемещений выполнены бесконтактными. Устройство для контроля формы поверхности объектов снабжено упругими элементами, предназначенными для соединения преобразователей перемещения с соответствующими дополнительными штоками.
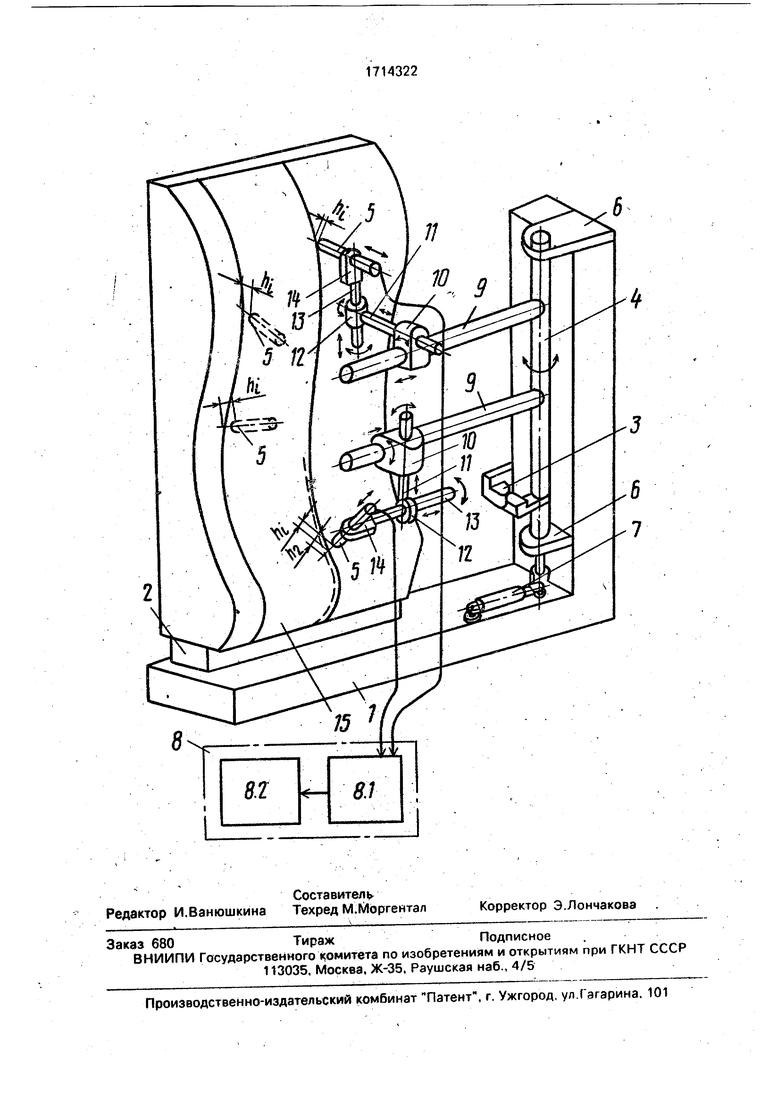
На чертеже представлено устройство для контроля формы поверхности обьекта, конструкция.
Устройство содержит основание 1, с которым связан узел 2 крепления контролируемого объекта, упор 3, осуществляющий фиксирование на измерительной позиции измерительного блока, включающего ось 4, закрепленную на основании 1 с возможностью поворота, измерительные преобразователи 5 перемещений, выполнены бесконтактными и связаны через ось 4, а также опоры 6 с основанием 1 и приводом 7 перемещения измерительного блока. Блок индикации 8 включает логический блок 8.1 и табло индикации 8.2. Логический блок 8,1 связан с управляющим контроллером верхнего уровня управления (не показан}, например гибкой производственной системы контактной точечной сварки роботами. Измерительный блок содержит направляющие 9, жестко связанные с осью 4 и Охваченные ползунами 10, в которых, перпендикулярно направляющим 9, установлены подвижные штоки 11, а также направляющие втулки 12
с дополнительными .штоками 13, которые закреплены на свободном конце подвижных штоков 11, перпендикулярно им. Штоки 11 и 13 установленм с возможностью воз5 вратно-поступательного перемещения и поворота оси. Преобразователи 5перемещений закреплены в упругих злементах,14 и установлены на одном из концов дополнительных штоков 13.
0 Контролируемый объект 15 устанавливается в узле 2 крепления..
Устройство работает следующим образом.
Перед контролем поверхности однотипных изделий производится предварительная настройка устройства по зталонному изделию (показано пунктиром). С этой целью эталонное изделие устанавливается в узле 2 крепления, базируясь при этом относительно основания 1, например, посредством направляющих штырей (не показаны). Затем ось 4 приводится в соприкосновение с упором 3, а преобразователи 5 устанавливаются и фиксируются нормально к поверхности эталонного изделия с зазором h в выбранных точках контроля посредством перемещения с последующей фиксацией ползунов 10 по направляющим 9, штоков 11 и 13 в ползунах 10 и втулках 12 соответственно. Возв ратно-поступательное перемещение и поворот BOkpyr оси обеспечивает подвижное цилиндрическое соединение (с гарантированным зазором). Фиксация в лю; бом относительном положении осуществляется стопорным вином. Таким образом, гарантируется установка преобразователей 5 нормально к поверхности практически в любых точках сложных по конфигурации изделий.
0 Упругие элементы 14, представляющие собой плоские Иружины, позволяют демпфировать случайные удары преобразователей 5 об объект 15. На корпусе преобразователей 5 перемещения имеется
5 резьба со стопорными гайками относительно элемента 14. В исходном положении направляющие 9, жестко Связанные с осью 4, отведены от контролируемого объекта 15. По команде (от управляющего контроллера) привод 7 перемещения (например, пневмоцилиндр) поворачивает измерительный блок вокруг опоры 6 в измерительную позицию, т.е. до касания упора 4. При этом между преобразователями 5 и контролируемой поверхностью объекта 15 устанавливаются зазоры hi, соответствующие реальному положению контролируемых точек поверхности. В результате на выходах; преобразователей перемещения 5 появляются сигналы, пропорциональные соответствующим величинам зазоров hj, напримерсоответствующие уровню давления в случае применения струйных измерительных преобразователей, поступающие на входы логического блока 8.1, который сравнивает их с опорными сигналами, соответствующими
зазорам ho.
В тех случаях если отклонение А hi положения всех контролируемых точек объекта 15 находится в допуске, т.е..
lAhil lhi-hol АНдбп, где hi - реальный измерительный зазор 1-го измерительного преобразователя перемещений;
Д Ьдоп - до устимое отклонение, поверхности измеряемого объекта, то на соответствующих выходах блока 8.1 появляются соответствующие сигналы, поступающие на табло индикации 8.2, которое высвечивает информацию о соответствии контролируемого объекта допускам.
Если же отклонение положения одной или нескольких контролируемых точек находится не в допуске, т.е.
IА hi 1 I hi - ho I A hflon , TO на выходах блока 8.1 появляются сигналы, поступающие затем на табло индикации 8.2, несущие информацию об адресах точек, имеющих недопустимо большое отклонение Ahi .
От блока 8.1 к управляющему контроллеру верхнего уровня управления, посту пают сигналы на- дальнейшую транспортировку объекта 15. или его выбраковку в зависимости от результатов контроля всеми преобразователями 5. Таким образом, обеспечивается автоматическая выбраковка объектов.
Используя измерительные преобразователи 5 в бесконтактном исполнении, можно измерять крутые поверхности, в том числе параллельные направлению перемещения преобразователей 5 при выходе последних в измерительную позицию. Преобразователи 5 при нор.1альных условиях работы не контактируют с контролируемым объектом 15. Однако в нештатных ситуациях, например при неправильном базировании объекта 15 в узле 2 крепления, может произойти ударное взаимодействие преобразователей 5 с объектом 15. Для демпфирования удара в этом случае и служат упругие элементы 14, что повышает надежность устройства. В данном случае блок 8 индикации содержит струйный логический блок 8.1, а блок 8.2 выполнен в виде контроллера типа Stmatic SS - 11 OS с дисплеем,
на который выводится информация о состоянии преобразователей 5 (например, струйных кольцевых датчиков типа СТ135).
Предлагаемое устройство мржет использоваться для контроля поверхности
объектов различных типоразмеров и форм, включая крупногабаритные, являясь при этом достаточно легкой, ажурной и надежной конструкцией, а также при входном, операционном и послеоперационном контроле в гибкой производственной системе контактной точечной сварки.
Формула изобретения 1. Устройство для контроля формы поверхности объекта, содержащее основание,
измерительный блок с преобразователями перемещений, привод перемещения измерительного блока, узел крепления контролируемого объекта к основанию, упор для фиксации положения измерительного блока
и блок индикации, связанный с преобразователями перемещений, отличаю щ е ес я тем, что, с целью расширения номенклатуры контролируемых объектов, измерительный блок, выполнен в виде
направляющих, связанных с основанием посредством жестко связанной с ним оси, закрепленной на основании с возможностью поворота, ползунов, установленных на соответствующих наг)равляЮщих с возможностью перемещения по ним, штоков,, размещенных перпендикулярно направляющим с возможностью перемещения вдоль своей оси в соответствующих ползунах, втулок, закрепленных на соответствующих штоках, и размещенных с возмож 1остью перемещения в соответствующих втулках дополнительных штоков, на концах которых установлены соответствующие преобразователи перемещений.
2. Устройство по п.1, о тли ч а ю щ е ес я тем что измерительные преобразователи перемещений выполнены бecкoнтaктнымv1. 3. Устройство по П.1, О т л и ч а ю щ е ес я тем, что, с целью повышения надежно-,
сти. Оно снабжено упругими элементами, предназначенными для соединения преобразователей перемещения с соответствующими дополнительными штоками.
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для контроля профиля деталей | 1985 |
|
SU1252649A1 |
| Устройство для контроля профиля деталей | 1978 |
|
SU922503A1 |
| УСТРОЙСТВО ДЛЯ КОНТРОЛЯ РЕЗЬБ | 1993 |
|
RU2032141C1 |
| Устройство для контроля разнотолщинности цилиндрической токопроводящей оболочки | 1985 |
|
SU1384928A1 |
| УСТРОЙСТВО ДЛЯ КОНТРОЛЯ ГЕОМЕТРИИ ПРОФИЛЯ ЛОПАТОК И СТЕРЖНЕЙ ОХЛАЖДАЕМЫХ ЛОПАТОК ТУРБИН | 2001 |
|
RU2205363C2 |
| Устройство для допускового контроля амплитудно-частотной характеристики четырехполюсников | 1989 |
|
SU1608591A1 |
| Контрольно-сортировочное устройство | 1979 |
|
SU848099A1 |
| СПОСОБ КОНТРОЛЯ НАПРЯЖЕННО-ДЕФОРМИРОВАННОГО СОСТОЯНИЯ В БЛОЧНЫХ СТРУКТУРАХ ГЕОСФЕРЫ, БАЗОВАЯ ОПОРА, ДЕФОРМОМЕТР И РЕГИСТРАТОР | 1995 |
|
RU2097558C1 |
| Устройство для измерения технических характеристик механоэлектрических преобразователей с емкостным выходом и способ измерения коэффициента преобразования по заряду (варианты) | 2023 |
|
RU2797751C1 |
| Устройство для измерения толщины покрытий | 1984 |
|
SU1293462A1 |
| Авторское свиде'тельство СССР , Kfe 125264^, кл | |||
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Приборы и системы автоматического контроля, размеров деталей Мишин | |||
| - Киев: Техника, 1970, с | |||
| Катодное реле | 1921 |
|
SU250A1 |
| Очаг для массовой варки пищи, выпечки хлеба и кипячения воды | 1921 |
|
SU4A1 |
| Цель изобретения -расширение номенклатуры контролируемых объектов | |||
| Устройство содержит основание, измерительный блок с измерительными преобразователями перемещения, приводперемещения измерительного блока, узел крепления контролируемого объекта к основанию, упор для фиксации положения измерительного блока и блок индикации, связанный с преобразователями перемещений | |||
| Измерительный блок выполнен в виде направляющих, связанных с основанием посредством жестко соединенной с ними оси, закрепленной на основании с возможностью поворота, ползунов, установленных на соответствующих направляющих с возможностью перемещения по ним | |||
| ш^токов | |||
| размещенных перпендикулярно направляющим с возможностью перемещения вдоль своей оси в соответствующих ползунах, втулок, закрепленных на соответствующих штоках и, размещенных с возможностью перемещения в соответствующих втулках, дополнительных штоков, на концах которых установлены соответствующие преобразователи перемещений, выполненные бесконтактными | |||
| Устройство снабжено упругими Злементами, предназначенными для соединения преобразователей перемещения с соответствующими дополнительными штоками | |||
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| ф-лы | |||
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Измерительный блок с измерительными преобразователями выполнен в виде размещенной на подвижном основании стойки из злектроизоляционного материала с злект- роконтактными злементами и датчика положения блока измерительных стержней | |||
| При зтом датчик и злектроконтактные злементы подключены к многократному блоку индикации. | |||
