ки имеет узел пороговых элементов, узел генерации сигналов, узел логи- . ческих переключений, узел депшфрации, узел индикации контролируемых параметров, узел ключей и узел источников питания, при этом первые выходы узла пороговых элементов через последовательно соединенные узел генерации сигналов, узел логических переключений и узел дешифрации подключены к первым входам узла индикации контролируемых параметров, второй вход которого соединен с вторым выходом узла пороговых элементов, причем первый выход узла индикащга контролируемых параметров связан с первым входом узла источников питания, вторые входы которого соединены с выходами узла ключей, первые входы которого подключены к вторым выходам узла индикации контролируемых .параметров, причем первые входы узла ключей соединены с выходами узла поу оговых элементов.

| название | год | авторы | номер документа |
|---|---|---|---|
| Тренажер оператора энергоемких процессов | 1981 |
|
SU1043720A1 |
| Тренажер оператора мартеновскойпЕчи | 1979 |
|
SU796903A1 |
| Устройство для моделирования кислородно-конверторной плавки | 1981 |
|
SU985799A1 |
| Тренажер сварщика | 1985 |
|
SU1302313A1 |
| Тренажер оператора энергетического объекта | 1978 |
|
SU1160462A1 |
| Устройство контроля температуры металла в конверторе | 1980 |
|
SU1073290A1 |
| Тренажер сварщика | 1989 |
|
SU1663619A1 |
| Устройство для определения содержания углерода в металле | 1991 |
|
SU1781307A1 |
| Устройство контроля уровня ванны в конвертере | 1990 |
|
SU1752778A1 |
| Устройство определения момента прекращения продувки кислородного конвертера | 1991 |
|
SU1765186A1 |
I. ТРЕНАЖЕР ОПЕРАТОРА 1а1СЛОРОДНОГО КОНВЕРТЕРА, содержащий блок задания управляющих воздействий,, соединенный с блоком моделирования загрузки сыпучих материалов, блоком . моделирования процессов плавки, блоком имитации положения фурмы, блоком имитации положения конвертера и блоком оценки качества управления, подключенным к блоку моделирования процессов плавки, соединённому с блоком предъявления информации, связанным с блоком моделирования загрузки сыпучих, материалов, подключенным к дополнительному блоку предъявления информации, соединенному с блоком имитации положения конвертера и блоком имитаций положения фурмь:, подключенным к блоку имитац$ш положения конвертера и блоком предъявления информации и моделирования процессов плавки, отличающийся тем, что, с целью повышения эффективности обучения, он имеет блок имитации шума конвертера и блок имитации контролируемых параметров плавки, при этом дополнительные выходы блока задания управляющих воздействий соединены с первыми входами блока имита- цин шума конвертера, второй вход роторого подключен к дополнительному выходу блока имитации положения фурмы, а третий вход связан с первым управлякицим выходом блока моделирования процессов плавки, -второй управляющий выход которого соединен с входом блока имитации контролируемых параметров плавки, подключённого выходом к дополнительному входу дополнительного блока предъявления информации. 2.Тренажер по п. 1, о т л и ч а ю щ и и с я тем, что блок имитации шума конвертера имеет генератор шума, сумматоры, узлы умножения, ключг, узел создания акустического зффекта включения кислорода и узел воспроизведения звука, при этом первый выход генератора шума соединен с первым входом первого сумматора, второй вход которого подключен к выходу первого узла умножения, который 00 СХ) первым входом подключен к второму выходу генератора шума, а вторым вхоо ел ел дом связан с выходом второго сумматора, соединенного одним из входов с первым входом второго умножения, который вторым входом подключен к .вькоду первого сумматора, выход второго узла умножения через последовательно соединенные ключ и узел создания акустического эффекта включения кислорода связан с входом узла воспроизведения звука. 3.Тренажер по п. 1, отличающийся тем, что блок имитации контролируемых параметров плав
Изобретение относится к тренажерам операторов систем управления и может быть использовано для обучения операторов кислородных конвертеров .
Известен тренажер оператора кислородного конвертера, содержащий блок задания управляющих воздействий, соединенный с блоком моделирования загрузки сыпучих материалов, блоком моделирования процессов плавки, блоком имитации положения фурмы, блоком имитации положения конвертера и блоком оценки качества управления, подключенным к блоку моделирования процессов плавки, соединенному с блоком предъявления информации, связанным с блоком моделирования загрузки сьшучих материалов, подключенным к дополнительному блоку предъявления информации, соединенному с блоком положения конвертера и блоком имитации положения фурмы, подклю енным к блоку имитации положения конвертера и блокам предъявле1пш информации и Моделирования процессов плавки Cl7«
Недостатком данного тренажера является невысокая эффективность обучения.
Цель изобретения - повышение эффективности обучения.
Поставленная цель достигается тем что тренажер оператора кислородного конвертера, содержащий блок задания управляющих воздействий, соединенный с блоком моделирования загрузки сытгучих материалов, блоком моделирования процессов плавки, блоком имитации положения фурмы, блоком имитации положения конвертера и блоком оценки качества управления, подключенным к блоку моделирования процессов плавки, соединенному с блоком предъявления информации, связанным с блоком моделирования загрузки сыпучих материалов , подключенным к дополнительному блоку предъявления информации, соединенному с блоком имитации положения конвертера и блоком имитации поло- , жения фурмы, подключенным к блоку имитации положения конвертера и блоком предъявления информации и моделирования процессов плавки, имеет блок имитации шума конвертера и fлок имитации контролируемых параметров плавки, при этом дополнительные выходы блока задания управляющих
воздействий соединены с первыми входами блока имитации шума конвертера, второй вход которого подключен к дополнительному выходу блока имитации положения фурмы, а третий вход свя-
зан с первым управляющим выходом блока моделирования процессов плавки, второй управляющий выход которого соединен с входом блока имитации контролируемых параметров плавки,
подключенного выходом к дополнительному входу дополнительного блока предъявления информации.
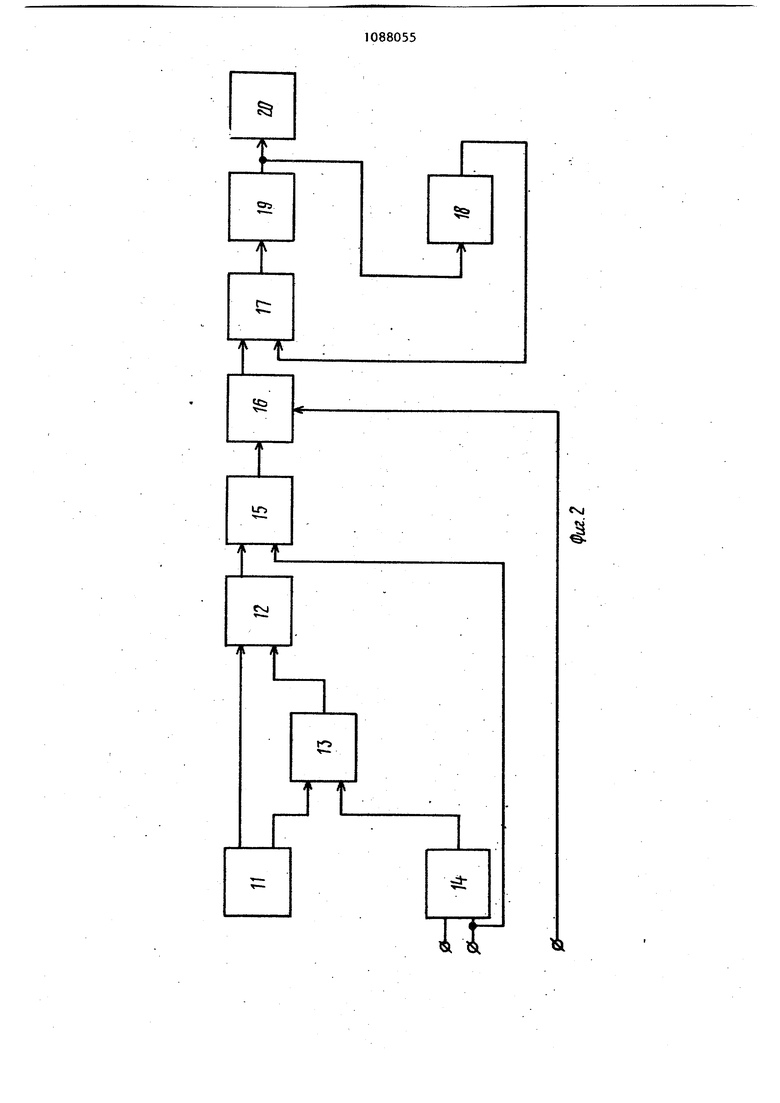
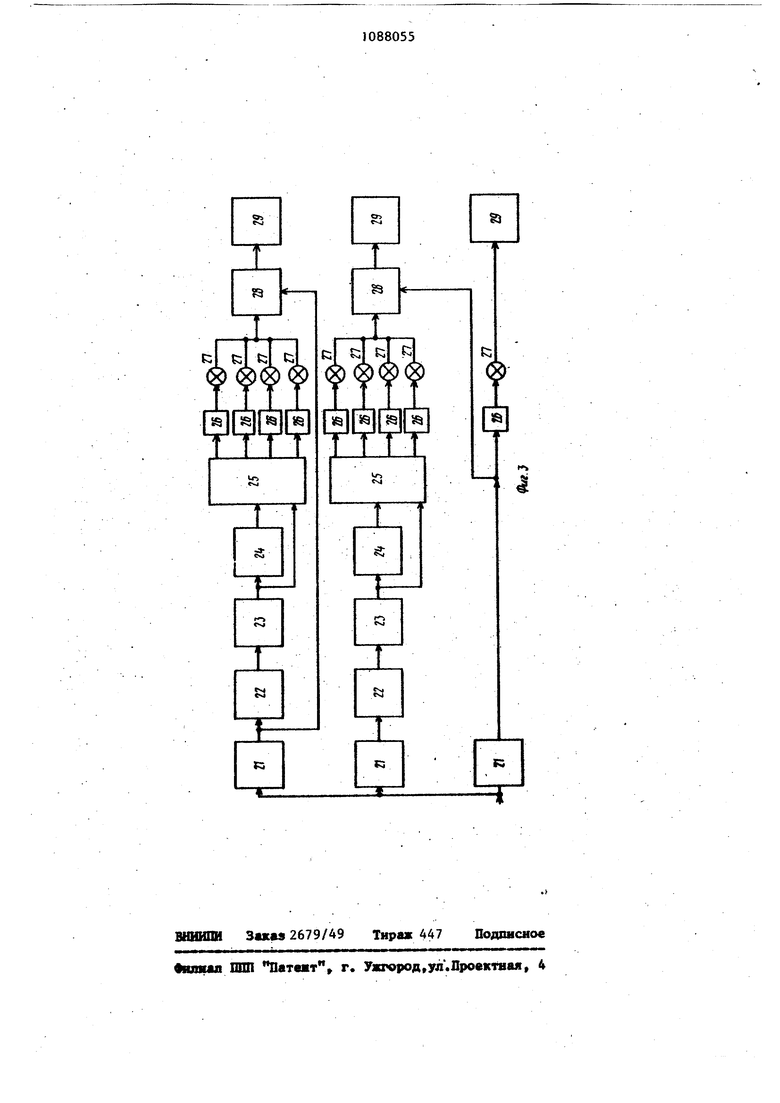
Блок имитации шума конвертера имеет генератор шума, сумматоры, узлы умножения, ключ, узел создания акустического эффекта включения кислорода и узел воспроизведения звука, при .этом первый выход генератора шума соединен с первым входом перво го сумматора, второй вход которого подключен к выходу первого узла умно жения, который первым входом подключен к второму выходу генератора шума а вторым входом связан с.выходом вто рого сумматора, соединенного одним из входов с первым входом второго узла умножения, который вторым входо .юдключен к выходу первого сумматора выход второго узла умножения через последовательно соединенные ключ и узел создания акустического эффекта включения кислорода связан с входом узла воспроизведения звука. Блок имитации контролируемых пара метров плавки имеет узел пороговых элементов, узел генерации сигналов, узел логический переключений, узел дешифрации, узел индикации контролир емых параметров, узел ключей и узел источников питания, при этом первые выходы узла пороговых элементов через последовательно соединенные узел генерации сигналов, узел логических переключений и узел дешифрации подключены к перв,м входам узла индикации контролируе й 1Х параметров, второй вход которого соединен с вторым выходом узла пороговых элементов, причем первый выход узла индикации контролируемых параметров связан с первым входом узла источников питания, вторые входы которого соединены с выходами узла ключей, первые входы которого подключены к вторым выходам узла индикации контролиру-. емых параметров, причем первые входы узла ключей соединены с выходами узла пороговых элементов. На фиг. I приведена блок-схема тренажера; на фиг. 2 - структурная схема блока имитагщи шума конвертера; на фиг. 3 - структурная схема блока имитации контролируемых параметров плавки. Устройство содержит блок 1 моделирования процессов плавки, блок 2 предъявления информации, блок 3 ими тации шума конвертера, блок 4 имита ции контролируемых параметров плавки, блок 5 задания управляющих воздействий, блок 6 моделирования загр ки сыпучих материалов, блок 7 имита ции положения фурмы, блок 8 оценки качества уцравления, блок 9 имитаци положения конвертера и дополнительный блок 10 предъявления информации Блок 3 имитации шума конвертера содержит генератор 11 тума, сумматор 12, узел 13 умножения, сумматор 14, узел 15 умножения, ключ 16, схему 17 умножения сигналов, инерционное звено 18 первого порядка, усилитель 19 и узел 20 воспроизведения звука, причем схема 17 умножения сигналов, инерционное звено 18 первого порядка и усилитель 19 образуют узел создания акустического эффекта включения кислорода. При этом первый выход генератора 11 шума соединен с первым входом первого сумматора 12, второй вход которого подключен к выходу первого узла 13 умножения, который первым входом подключен к второму выходу генератора II шума, а вторым входом связан с выходом второго сумматора |4, соединенного одним .из входов с первым входом второго узла 15 умножения, который Вторым входом подключен к выходу первого сумматора 12, выход второго узла 15 умножения через последовательно соединенные ключ 16 и узел создания акустического эффекта включения кислорода связан с входом узла 20 воспроизведения звука. Блок 4 имитации контролируемых параметров плавки вкхЕючает в себя пороговые элементы 21, генераторы 22 сигналов, триггеры 23 и 24, дешифраторы 25, усилители 26, индикаторы 27, ключи 28 и источники 29 питания. Узел пороговых элементов состоит из пороговых элементов 21. Узел генерации сигналов имеет генераторы 22 сигналов . Триггеры 23 и 24 образуют узел логических переключений. Узел дешифрации содержит дешифраторы 25. Узел индикации контролируемых параметров выполнен из усилителей 26 и индикаторов 27. Узел ключей состоит из ключей 28.. Узел источников питания содержит источники 29 питания, при этом первые вьрсоды узла пороговых элементов через последовательно соединенные узел генерации сигналов, узел логических переключений и узел дешифрации подключены к первым входам узла индикации контролируемых параметров, второй вход которого соединен с вторым выходом узла пороговых элементов, причем первый выход узла индикации контролируемых параметров связан с первым входом узла источников питаний, вторые входы которого соединены с выходами узла ключей, первые входы которого подключены к вторым выхо дам узла индикации контролируемых параметров, причем первые входы узла ключей соединены с выходами узла пороговых элементов. -При этом дополнительные выходы блока 5 задания управляющих воздействий со здинены с первыми входами блока 3 имитации шум конвертера, второй вход которого подключей к дополнительному выходу блока 7 имитации положения фурмы, а третий вход связан с первым управляющим виходом блока 1 моделирования процессов плавки, второй управляющий выход ко торого соединен с входом блока 4 имитации контролируемых параметров плавки, подключенного выходом к дополнительному входу дополнительного блока 10 предъявления информации. Генератор 11 шума выполнен на основе стереофонического магнитофона, воспроизводящего.бесконечную запись реального шума продувки одновременно по двум каналам. По первому каналу воспроизводится запись шума, характерного для бесшлаковой продувки (свернутое состояние шлака), а по другому - запись шума, сопровождающего продувку при нормально вспененном ишаке (уровень галака близок к горловине конвертера). Генератор 22 управляется отрицательным потенциалом на входе, причем при нулевом входном напряжении генератор не работает, а с ростом отрицательного потенциала 0,5-15 В его частота возрастает от 0,5 до 3 Н2. Процесс обучения на тренажере осуществляется следующим образом. Перед началом моделирования процес са продувки металла в конвертере обучаемый выполняет ряд организационнотехнологических операций, связанных с дозированием и подачей сыпучих материалов в конвертер, завалкой металлического лома и заливкой чугуна. Команды на выполнение указанных операций обучаемым производятся с помоп|;ью блока 5 задания управляющих воздействий, представляющего собой совокупность переключателей и кнопок. Кон троль за выполнением организационнотехнологических операций ocyD ecтвляется с помощью контрольно-измерительных приборов блока 2 предъявления информации, расположенных на приборных панелях тренажера, а также с помощью световых индикаторов блока 6 моделирования .загрузки сыпучих мато.риалов и блока 9 имитации положения конвертера и организационно-технологических ситуаций, оптически связанных с дополнительным блоком 10 предъявления информации. Кроме того, с помощью блока 5 задают начальные условия плавки ( масса чугуна, масса и количество совков металлического лота, тe пepaтypa и химический состав чугуна ), а также проигзводят включение генератора 1I шума. Процесс моделирования продувки металла в кониертере начинается с установки имитатора конвертера, входящего в состав блока 9, в вертикальное положение, опускание имитатора фурмы, являющегося составной частью блока 7, до необходимой величины и подачи кислоророда на .продувку, команды обучаемый задает с помощью блока 5 задания управляющих воздействий. В момент включения кислорода на продувку с блока 5 поступает управляющий сигнал в блок 3 имитации шума конвертера (фиг. 2), которыГг воспроизводит акустическую информацию, характеризующую ход плавки. При подаче управляющего сигнала с блока 5 на в}4од ключа 16 обеспечивается подключение генератора 11 шума с помощью сумматора 12, узлов 13, 15, 17 умножения и усилителя 19 к акустической системе узла 20. При этом инерционное звено 18 первого порядка, включенное в обратную связь усилителя 19 через схему I7 умножения сигналов, создает акустический эффект включения кислорода. Сигнал, соответствующий шуму продувки при вспененном шлаке, поступает с первого выхода генератора 11 шума на первый, вход сумматора 12, а сигнал, характеризующий шум продувки при отсутствии шлака, подается с второго выхода генератора I1 шума на первый вход узла 13 умножения. Узел 13 ум-ножения представляет собой амплитудный модулятор высоких частот, изменение которых происходит в зависимости от значения ЛЬ, которая характеризует величину : аглубления фурмы в шлак шл Ч где h,.,. высота слоя шлакометаллической эмульсии; Ьф - высота сложения кислородной фурмы. Величина рассчитывается сумма тором 14, на выходе которого формируется сигнал л h -/-О. Если ДЬ О, то сумматор вырабатьшает нуле.во погенциал. Конструктивно это реализует ся путем установки в обратной вязи сумматора 14 диодной ячейки. В зави симости от степени заглубления Лурмы в 1плак вырабатывается сигнал ДЬ, изменяющийся от О до 1 и учитывающий свойство шлака фильтровать высокио частоты. Сигнал с узла 13 умножения поступает на вход сумматора 12, где он складывается с сигналом, идуишм с первого выхода генератора 11. Суммар ный сигнал, характеризующий шум продувки , умножается в узле I5 умножения на величину h. Этим учитывается изменение общей интенсивности тумз в зависимости от положения фурмы в пол сти конвертера. Моделирование (воспроизведение) физико-Х1-:мическ1гх: закономерностей протекания плавки осуществляется в блоке 1 моделирования, реализованно на основе вычислительной машины. В отот блок поступает информация об управляющих воздействиях, значение которых контролируется на приборах блока 2 предъявления информации. В ходе моделирования процесса . плавки из блока 1 в блок 4 имитации контролируемых параметров Плавки по ступает сигнал, характеризующий высоту шлакометалличсской эмульсии в конвертере Ьщд. При малом значении h в кислородном конвертере наблюдается интен сивный вынос капель металла из агре гата вследствие больших расходов ки лорода на продувку (3-5 ), В ходе плавки уровень шлака меняется в зависимости от принятия решений обучаемым. Для этого в конвертер по дают известь, плавиковый шпат и изм няют содержание окислов железа в шл ке путем варьирования уровнем кисло родной фурмы и расходом кислорода. Технологически нормальный ход соответствует заполнению ишакометаллической эмульсией полости конвертера до горловины. При чрезмерном заполн НИИ конвертера пшако возможны выбросы, а так5хе переливы через горлояииу. Указанные признаки состояния шлакометаллической эмульсии имитируются блоком 4, которьй работает следующим образом. При низком уровне сигнала h открыт оДин пороговый элемент 21, а дпугие пороговые элементы 21 закрыты. В этом случае генератор 22 подает импульсы, которые переключают триггеры 23 и 24. При,этом дeш фpaтop 25 через усилители 26 последовательно включает индикаторы 27, запитанные от источника 29 через ключ 28. Таким образом, имитируется вьшос капель металла из koHBepTepa. При повьппении уровня сигнала h д до значения, соответствующего нормальному состоянию шлака, первый пороговый элемент 21 и ключ 28 закрываются,, индикаторы 27 гаснут. При дальнейшем повьшении уровня сигнала шл ° величины, соответствующей появлению незначительных выбросов, открывается второй noporoBbtfi элемент 21, начинает работать генератор 22, импульсы которого переключают последовательно соединенные соответствуюпще триггеры 23 и 24. Дешифратор 25 через усилители 26 попеременно включают оставшиеся индикаторы 27, запитанные от источника 29 через ключ 28. При этом чем больше величина тем больше частота генератора 21 и тем интенсивнее имитируются выбросы. При дальнейшем повышении уровня сигнала, что соответствует ситуации появления интенсивных выбросов и переливов шлакометаллической эмульси1г через горловину конвертера, .срабатывает третий пороговый элемент 21, закрывается соответствующий ключ 28, гаснут индикаторы 27 и через усилитель 26 зажигается индикатор 27, запитанный от источника 29 питания, имитирующий интенсивный выброс или перелив шлакометаллической эмульсии через горловину конвертера. Обучаемьп, анализируя состояние дутьевого и. шлакового режимов с помощью имитаторов шума и визуально наблюдаемых признаков, принимает соответствующие управлякмцие воздействия, обеспечивающие нормальный ход плавки. Кроме того, у обучаемого формируются навыки управления в аварийных и предаварийных ситуациях (интенсивные выбросы и переливы лшака через горловину конвертера), в результате которых в реальных условиях происходят большие потери металла.
В блоке 4 подсчитывается стоимость энергоресурсов и сыпучих материалов, затраченных обучаемьо4 на проведение плавки. Эта информация позволяет оценить эффективность управления, а также умение вести плавку с экономической точки зрения.
Таким образом, имитация в тренажере шума продувки и визуально наблюдаемых признаков повьпиает степень информационного подобия тренажера реальному объекту и обеспечивает формирование у обучаемого ра1шоиальных навыков ведения плавки.
Использование изобретения повьшает эффективность обучения.
Фиг.1
| I | |||
| Авторское свидетельство СССР по заявке № 3313255, 02.07.81 |
