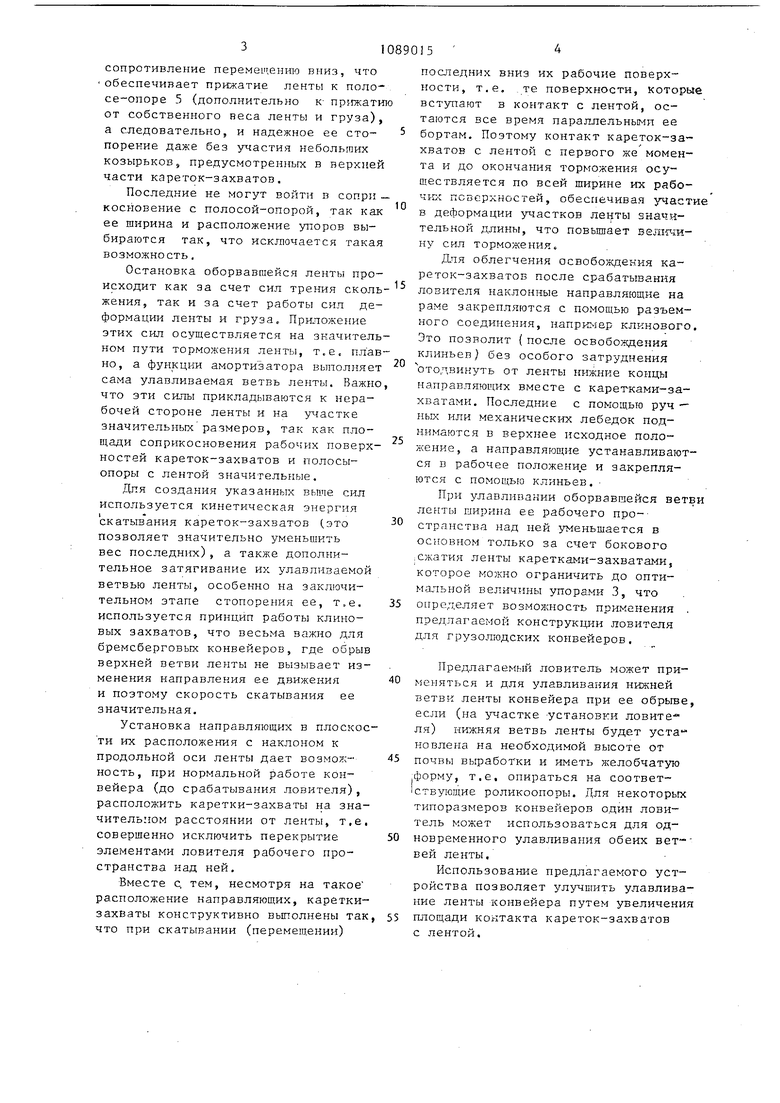
1 И.юОре геиие отпосится к непрерыв ному коиг рнепному транспорту и а Тся yfTpOHCTi длл у.плг5липания Koirвсйертгых лпит в случае их обрыла. ИяврсТ({о устройстве для улавливания j;eiiTbi когвепнра в случр.е 8G обрыяя, ;3K:j;o43 Oinee гаарнирно закрС:: - ленные концов дугообрпэп гс нзлимод.сйствугопие с лентой (после ее, обрьпа) вследствг-п их сближенья,. проискодяшего а сл гикл ibiioro опускания грузов, сое дшилгтгых н,крест :-мбк.им элементом ) с перх11И.:и копнами дугообрлзнмх р - чягов, Остягювка ленты П кпк;ходгт вс.;;е,лствие работы сил трепиг ско. н сип деформгиипт дсчггь: ;; фс ;i; toиг гfепенкя груза LI 1г. j ;i;ii:-OM устройс г;.;е jijni nonei e-SH го сжлтия груженной ле;г1Ъ1 .дугообилч ньтмч phiuaraNiH приводные грузы должн б|-;тп 6cj;biii -ix , иначе нел1 -зя уловить тяжелогруженную ленту, FCpo;-ie того,, дан}юе устройстг-о не может примениться на грузолюдскк ко;- ;ейе:рах из-за дер екрытия рабочег 11:ространс7Л а над лентой накрест .сл).тг женгьмя канатами, biVTiV-jiee блгззккм к rтpeдлaгae io iy янляется устрой( для улавливания леи гы -дра з случае ее обрывЯ} зкг;очаС: ес: каретки-захватЫ с рабочи ми 1:оверхпг:ст11МИ5 связанные с датчи ком обрыва ленты и установлеиньк на таклоллык в вертикальной плоскос ти н Г) CTOpOl-y, ГГрОТИВОЛОЛОлчНуЮ рабоче.{у двинентчо конвейера, напра ляю;цих вepлF ;:e концы которых расноложеньл с двух сторон лешы к о к в о и е р л 2 J, В и 3 в е с г г; о м у с т р о и с т в е т о рм о з но е усилие ;:рик,падываегся исполнительными (козьфьками тележек) к пебольг(П площади лентьц что вызывает зналителычые удельные понере.дг.ге да1злени,ч на ленту. Кроме того :..уроцесс улавливания происходит вес-ъма жестко, что часто приводит к вырыву частков ленты, зажаты козы1 ьками. Цель изобретения повыгпеняе эффективности работы уттавливаюшего ; устройства. Указанная цель достигается те.ь, что в устройстве длл улавливания ленты конвейера в случае ее обрьгва, Бключаюшем каретки-яахваты с рабочи ми говерхностями, связанные с датчк 5 ком обр1,;ва лентъ и ус ганопленные на наЕхЛо:-П 1.х в вертикальной плоскости и }i сторон.уу противоположную рабочему дв;г«|; нню конвейе)а;, нанравляюгеих, верхние конЛцЫ которых расположень с лл;ух ciopOH ле)гП) конвейера, нижние гочп, 1аправляюп их расположе}1Ы под лентой конггейера, причем рабо. rioi;eii:.Hoc г и к ар е то к-з ах в а то в выполнен ;: с выемками с возможностью взаимо; еиствия их поверхностей с нер а б (34 ими п о в ер хн о с т ями - к р агп-Их участков леггты кон/зейера , Па фиг,1 изображен предлагаемый лонитсль, вид сбоку; на фиг.2 то же, нид в плане; на фиг.З - разрез А-Л ма фиг , 2 ,: Устройство для улавливания . кс:гвей(ра н случае ее обрыва содержит уста юн:;енные на его раме }1аклонд; le нйиравляогцие , на которых разме-цены каретки-захваты 2 и закрен.чсггы угнорь; 3, ограничивающие скат1.пание кареток-захг-атов. Несколько ниже улавливаемой верхней ветви 4 кслизейерной ленты пдс;ль ее продолььой о г; и закреплена полоса-опора 5,, ограничи,-;ающая дрозисание ленты noc:ie обрьД-а и обеспечивающая эф- Фектиплае зажатие ее при улав7П-1вании каретками-захватами, Поло са-онора может состоять из нескользких отдельи,к узкггх полос (или име1д соответств«():цие прорези 15 отверстия) , рас;голоженнъгх на 3}1ачитель)ом расстоянии от нижней ветки 6 конвет ерной легсты, и при необходимости иметь р;5бр -7 жес-1кости, Каретки-захлаты выполнслнм с рабочими поверхностями 7. При обрыве конвейерной ленты сигнал от датчика обрыва передается стопорному устройству (не показаны), которое освобождает каретки-захваты и они под действием собственного веса ск;1тьгза1отся вииз но направляющим :, Так как направляющие имеют наклон в 71вух гпоскостях то каретки-захваты скатьг-аясъ, приближаются к улавливаемой ветви . как сверху, так и с боковь;х сторон. Вначале каретки-захваты .нереме,щшотся, не касаясь ленты, затем они начинают соприкасаться с ней, встречая первоначально неболььпое сопротивление деформании ее боковых кромок, но потом, все больше сжимая ленту с боковых сторон,- каретки-захваты начинают восприии -;ать все возрастающее
сопротивление перемеиению вниз, что обеспечивает прижатие ленты к полосе-опоре 5 (дополнительно к- прижати от собственного веса ленты и груза), а следовательно, и надежное ее стопорекие даже без участия небольших козырьков, предусмотренных в верхней части кареток-захватов.
Последние не могут войти в сопри - косновение с полосой-опорой, так как ее ширина и расположение упоров выбираются так, что исклочается такая возможность.
Остановка оборвавшейся лентьг происходит как за счет сил трения скольжения, так и за счет работы сил деформации ленты и груза. Приложение этих сил осуществляется на значительном пути торможения ленты, т.е. плавно, а функции амортизатора выполняет сама улавливаемая ветвь ленты. Важно что эти силы прикладываются к нерабочей стороне ленты и на участке значительных размеров, так как площади соприкосновения рабочих поверхностей кареток-захватов и полосыопоры с лентой значительные.
Для создания указанных вьппе сил используется кинетическая энергия скатывания кареток-захватов (это позволяет значительно уменьшить вес последних), а также дополнительное затягивание их улавливаемой ветвью ленты, особенно на заключительном этапе стопорения ее, т.е. используется принцип работы клиновых захватов, что весьма важно для бремсберговых конвейеров, где обрыв верхней ветви ленты не вызывает изменения направления ее движения и поэтому скорость скатывания ее значительная.
Установка направляющих в плоскости их расположения с наклоном к продольной оси ленты дает возможность, при нормальной работе конвейера (до срабатывания ловителя), расположить каретки-захваты на значительном расстоянии от ленты, т.е. совершенно исключить перекрытие элементами ловителя рабочего пространства над ней.
Вместе с. тем, несмотря на такое расположение направляющих, кареткизахваты конструктивно выполнены так, что при скатывании (перемещении)
последних вниз их рабочие поверх} ости, т.е. .те поверхности, которые вступают Б с лентой, остаются все время параллельными ее бортам. Поэтому контакт кареток-захватов с лентой с первого же момента и до окончания торможения осуществляется по всей ширине юс рабо4iix. поверхностей, обеспечивая участие в деформации участков ленты значительной длины, что повышает вел1 -1Ину сил торможения.
Для облегчения асвобождения кареток-захватов после срабатывания ловителя наклонные направляющие на раме закрепляются с помощью разъемного соединения, например клинового. Это позволит ( после освобождения клиньев) без особого затруднения
0 Ътодвинуть от ленты нижние концы направляющих вместе с каретками-захватами. Последние с помощью руч - ных или механических лебедок поднимаются в верхнее исходное положение, а направляюп ие устанавливаются в рабочее положени.е и закрепляются с помощью клиньев.
При улавливании оборвавшейся ветви ленты щирина ее рабочего пространства над ней уменьшается в основном только за счет бокового сжатия ленты каретками-захватами, которое можно ограничить до оптимальной величины упорами 3, что определяет возможность применения . предлагаемой конструкции ловителя для грузолюдских конвейеров.
Предлагаемый ловитель может применяться и для улавливания нижней ветвк ленты конвейера при ее обрьгое, если (на участке установки ловите ля) нижняя ветвь ленты будет уста новлена на необходимой высоте от
5 почвы выработки и иметь желобчатую форму, т.е. опираться на соответствуютдие роликоопоры. Для некоторых типоразмеров конвейеров один ловитель может использоваться для одновременного улавливания обеих
0 вей ленты.
Использование предлагаемого устройства позволяет улучшить улавливание ленты конвейера путем увеличения площади контакта кареток-захватов
S с лентой.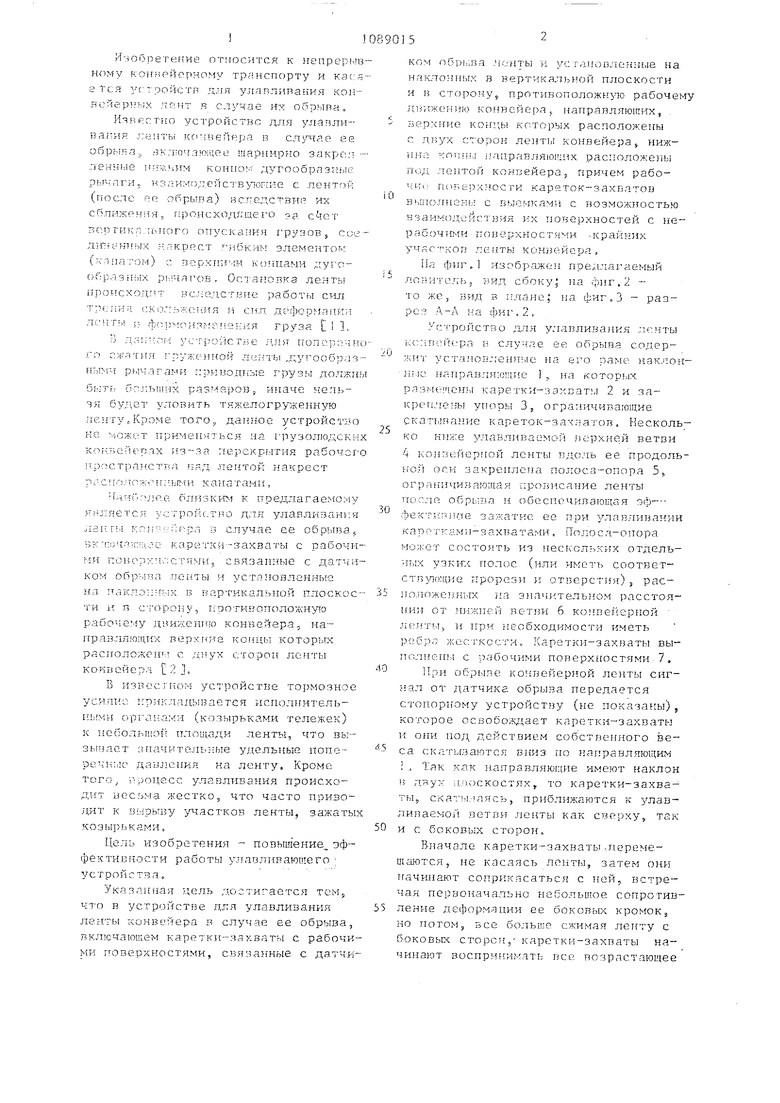
| название | год | авторы | номер документа |
|---|---|---|---|
| НАКЛОННЫЙ ЛЕНТОЧНЫЙ КОНВЕЙЕР | 2011 |
|
RU2478551C1 |
| НАКЛОННЫЙ ЛЕНТОЧНЫЙ КОНВЕЙЕР | 2009 |
|
RU2408519C2 |
| НАКЛОННЫЙ ЛЕНТОЧНЫЙ КОНВЕЙЕР | 2009 |
|
RU2396198C1 |
| СТЕНД ДЛЯ ИССЛЕДОВАНИЯ ПАРАМЕТРОВ ЛОВИТЕЛЕЙ ДЛЯ КОНВЕЙЕРОВ С ПОДВЕСНОЙ ЛЕНТОЙ | 2007 |
|
RU2350915C1 |
| НАКЛОННЫЙ ЛЕНТОЧНЫЙ КОНВЕЙЕР | 2009 |
|
RU2404107C1 |
| СПОСОБ ОСТАНОВКИ ЛЕНТЫ КОНВЕЙЕРА В СЛУЧАЕ ЕЕ ОБРЫВА И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1994 |
|
RU2067070C1 |
| СТЕНД ДЛЯ ИССЛЕДОВАНИЯ ПАРАМЕТРОВ ЛОВИТЕЛЕЙ ДЛЯ КОНВЕЙЕРОВ С ПОДВЕСНОЙ ЛЕНТОЙ | 2006 |
|
RU2323424C1 |
| НАКЛОННЫЙ КОНВЕЙЕР С ПОДВЕСНОЙ ЛЕНТОЙ | 2006 |
|
RU2326040C1 |
| НАКЛОННЫЙ КОНВЕЙЕР С ПОДВЕСНОЙ ЛЕНТОЙ | 2001 |
|
RU2184064C1 |
| НАКЛОННЫЙ ЛЕНТОЧНЫЙ КОНВЕЙЕР | 2009 |
|
RU2411175C1 |

УСТРОЙСТВО ДЛЯ УЛАВЛИВАНИЯ ЛЕНТЫ КОНВЕЙЕРА В СЛУЧАЕ ЕЕ ОБРЫВА, включающее каретки-захваты с рабочи- ми поверхностями, связанныес датчи-, ком обрыва ленты и установленные на наклонных в вертикальной плоскости и в сторону, противоположную рабочему движению конвейера, направляю1ци2, верхние концы которых расположены с двух сторон ленты конвейера, отличающее ся тем, что,с целью повыгаения эффективности работы улавлинающего устройства, нижние концы направлтощих расположены под лентой конвейера, причем рабочие поверхности кареток-захватов выполнены с выемками с возможностью взаимодействия их поверхностей с нерабочими поверхностями крайних участков ленты конвейера.
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Устройство для улавливания конвейерной ленты в случае ее обрыва | 1974 |
|
SU523843A1 |
| Разборное приспособление для накатки на рельсы сошедших с них колес подвижного состава | 1920 |
|
SU65A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| УСТРОЙСТВО для УЛАВЛИВАНИЯ ЛЕНТЫ ЛЕНТОЧНОГО КОНВЕЙЕРА | 0 |
|
SU196604A1 |
| Разборное приспособление для накатки на рельсы сошедших с них колес подвижного состава | 1920 |
|
SU65A1 |
| Видоизменение прибора для получения стереоскопических впечатлений от двух изображений различного масштаба | 1919 |
|
SU54A1 |
