Изобретение относится к радиоТехнике и автоматике и может быть использовано при разработке и испытании радиотехнических устройств и с)нстем автоматического управления различных объектов.
Известны устройства для определения динамических характеристик систем автоматики и радиотехники, основанные на сопоставлении входных и выходных сигналов системы, в общем состоящие из генератора гармонических колебаний и регистратора динамических характеристик. В этих устройствах на вхдд исследуемой системы ,с генератора поочередно-подаются гармонические сигналы с угловой
1 О, 1, 2, . ..N
частотой и
изменяющейся от сигнала к сигналу от сОд О 1/с до некоторой частоты с определенным, в принципе любым шагом, например постоянным dUJ const. Выходной гармонический сигнал системы каждой раз сравнивается в регистраторе с входным сигналом по амплитуде ифазе (амплитуднофазовая частотная характеристика) lj.
Полная динамическая характеристика исследуемой системы в известных устройствах получается в результате последовательного шагового изменения частоты входного гармонического сигнала в диапазоне, определяемом конкретными динамическими свойствами системы. Амплитудные значения входных гармонических сигналов определяются заданным спектром предполагаемого воздействия на систему в реальной эксплуатации. Теоретической основой работы этих устройств является преобразование Фурье. Его использование для исследования динамики систем предполагает выполнение для каждой конкретной системы принципа суперпозиции, т.е. когда линейной комбинации любых входных сигналов соответствует таже линейная комбинация соответствующих выходных сигналов.
Принципу суперпозиции удовлетворяют только линейные системы, следовательно эти устройства дают точную и исчерпывающую характеристику только для узкого класса систем, а именно - линейных. Для нелинейных систем устройства дают большую погрешность. Реальные элементы автоматических систем в большинстве случаев нелинейны. Лишь при известной
идеализации их можно считать в некоторых пределах линейными. В силу этого практически любая система является нелинейной. Следовательно, допущение при использовании этих устройств того, что система линейна, заведомо вносит ошибку в определение динамических ее свойств, что является недостатком устройств. При этом при разработке новой системы после получения в лабораторных условиях амплитудно-фазовой частотной характеристики ее опытного образца с использованием одного из известных устройств и их анализа на соответстствие заданным динамическим требованиям этот опытный образец системы проходит испытания в реальных условиях эксплуатации при действии реальных эксплуатационных входных воздействий. Таким образом, при разработке системы ее опытньвй образец несколько раз подвергается экспериментальной проверке динамических характеристик, что требует значительных затрат времени и поэтому является недостатком эт.их устройств.
Наиболее близким по технической сущности к предлагаемому является устройство для определения частотных характеристик динамических объектов, которое содержит генератор электрических колебаний, нелинейный элемент, синусный преобразователь, фильтр и блок регистрации динамических характеристик на электроннолучевой трубке C2J.
Указанное устройство характеризуется недостаточной точностью определения динамических характеристик нелинейных систем, для которых не выполняется принцип суперпозиции.
Цель изобретения - повышение точности устройства в определении динамических характеристик нелинейных систем путем приближения условий испытаний к натурным.
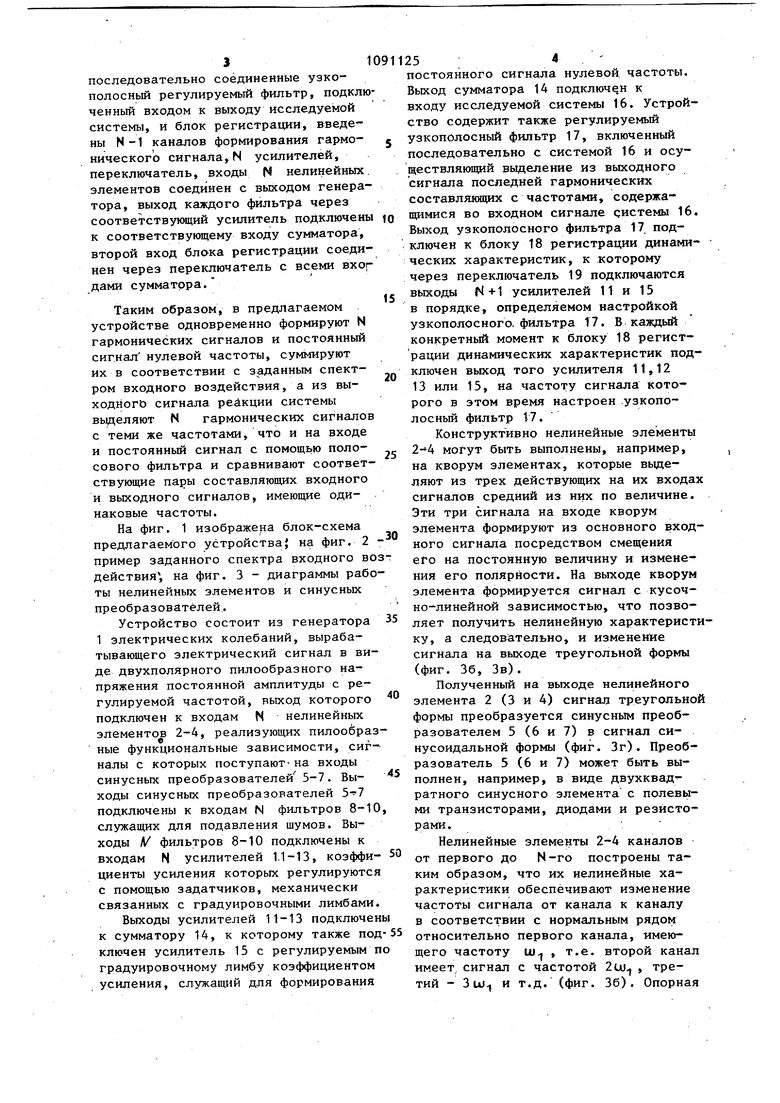
Указанная цель достигается тем, что в устройство для определения динамических характеристик систем, содержащее генератор, канал фррмирования гармонического сигнала, состоящий из последовательно соединенных нелинейного элемента, синусного преобразователя и фильтра, последовательно соединенные задатчик постоянного сигнала и сумматор, подключенный выходом к входу исследуемой системы. J последовательно соединенные узкополосный регулируемый фильтр, подклю ченный входом к выходу исследуемой системы, и блок регистрации, введены N-1 каналов формирования гармонического сигнала,N усилителей, переключатель, входы N нелинейных элементов соединен с выходом генератора, выход каждого фильтра через соответствующий усилитель подключены к соответствующему входу сумматора, второй вход блока регистрации соединен через переключатель с всеми вхог дами сумматора. Таким образом, в предлагаемом устройстве одновременно формируют N гармонических сигналов и постоянный сигнал нулевой частоты, суммируют их в соответствии с заданным спектром входного воздействия, а из выходногь сигнала реакции системы вьщеляют N гармонических сигналов с теми же частотами, что и на входе и постоянный сигнал с помощью полосового фильтра и сравнивают соответствующие пары составляющих входного и выходного сигналов, имеющие одинаковые частоты. На фиг. 1 изображена блок-схема предлагаемого устройства} на фиг. 2 пример заданного спектра входного во действия, на фиг. 3 - диаграммы рабо ты нелинейных элементов и синусных преобразователей. Устройство состоит из генератора 1 электрических колебаний, вырабатывающего электрический сигнал в виде двухполярного пилообразного напряжения постоянной амплитуды с регулируемой частотой, выход которого подключен к входам N нелинейных элементов 2-4, реализующих пилообраз ные функциональные зависимости, сигналы с которых поступают-на входы синусных преобразователей 5-7. Выходы синусных преобразователей подключены к входам N фильтров 8-10 служащих для подавления шумов. Выходы V фильтров 8-10 подключены к входам N усилителей 1.1-13, коэффициенты усиления которых регулируются с помощью задатчиков, механически связанных с градуировочными лимбами Выходы усилителей 11-13 подключен к сумматору 14, к которому также под ключей усилитель 15 с регулируемым п градуировочному лимбу коэффициентом усиления, служащий для формирования 254 постоянного сигнала нулевой частоты. Выход сумматора 14 подключен к входу исследуемой системы 16. Устройство содержит также регулируемый узкополосный фильтр 17, включенный последовательно с системой 16 и осуществляющий выделение из выходного сигнала последней гармонических составляянцих с частотами, содержащимися во входном сигнале дистемы 16. Выход узкополосного фильтра 17 подключен к блоку 18 регистрации динамических характеристик, к которому через переключатель 19 подключаются выходы N+1 усилителей 11 и 15 в порядке, определяемом настройкой узкополосного, фильтра 17. В каждый конкретный момент к блоку 18 регистрации динамических характеристик подключен выход того усилителя 11,12 13 или 15, на частоту сигнала которого в этом время настроен .узкополосный фильтр 17. Конструктивно нелинейные элементы могут быть выполнены, например, на кворум элементах, которые вьщеляют из трех действующих на их входах сигналов средний из них по величине. Эти три сигнала на входе кворум элемента формируют из основного входного сигнала посредством смещения его на постоянную величину и изменения его полярности. На выходе кворум элемента формируется сигнаш с кусочно-линейной зависимостью, что позволяет получить нелинейную характеристику, а следовательно, и изменение сигнала на выходе треугольной формы (фиг. 36, Зв). Полученный на выходе нелинейного элемента 2 (3 и 4) сигнал треугольной формы преобразуется синусным преобразователем 5 (6 и 7) в сигнал синусоидальной формы (фиг. Зг). Преобразователь 5 (6 и 7) может быть выполнен, например, в виде двухквад ратного синусного элемента с полевыми транзисторами, диодами и резисторами. Нелинейные элементы 2-4 каналов от первого до N-го построены таким образом, что их нелинейные характеристики обеспечивают изменение частоты сигнала от канала к каналу в соответствии с нормальным рядом относительно первого канала, имеющего частоту ш. , т.е. второй канал имеет сигнал с частотой 2(ju , третий - 3ш и т.д. (фиг. Зб). Опорная частота u) определяется частотой сигнапа генератора 1 (фиг. За). Блок 18 регистрации динамических характеристик может быть конструктивно выполнен различными способами Устройство работает следующим образом. По заданному линейчатому спектру входного воздействия, действующего на С1гстему 16 в процессе эксплуатации (фиг. 2), определяют набор частот uig , си , .... a,yj и интенсивности гармонических сигналов с указанными частотами SP , 5т ...,5(s| С помощью задатчика частоты на гене раторе 1 выставляют частоту сигнала генератора, равную опорной частоте W-, (фиг. За). Пилообразный сигнал генератора 1 после прохождения чере нелинейные элементы, синусные преобразователи и фильтры 2, 5 и 8 (канал сигнала 1-ой гармоники), 3, 6 и 9 (канал сигнала tt-ой гармо ники), 4, 7, 10 (канал сигнала N-о гармоники) преобразуются в синусоидальные сигналы одинаковой амплитуды с частотами, изменяющимися от канала к каналу по нормальному ряду Ш,ш ...,U)..C помощью задатчиков с градуи ровочными лимбами на усилителях 11, 13, 15, 12 выставляются их коэффициенты усиления, рассчитываемые по формуле где 1 0,1,2,... 4- номер гармоники (совпадает с номером канала), 5- интенсивности сигналов в соответствии с заданным спектр входного воздействия. Канал с номером О состоит из усилителя 15, формирующего постоянный сигнал нулевой частоты. После суммирования выходных сигналов усилите лей 11-13 и 15 на cjTMMaTope 14 с N 1 входом выходной сигнал последнего, представляющий собой сложный сигнал с заданным спектром, подаетс на исследуемую систему 16. Выходной сигнал исследуемой системы 16 подается на регулируемый узкополосньй фильтр 17. С помощью задатчика частоты на узкополосном фильтре 17 поочередно производится его настройка на вьщеление из выходного сигнала системы 16 гармонических составляющих с частотами U) , Uj ,.. ., cu , содержащимися во входном сигнале системы 16. В блоке 18 регистрации динамических характеристик, к которому с помощью переключателя 19 в данный момент подключен выход того усилителя 11-13 и 15, частота которого равна частоте сигнала на выходе узкополосного фильтра 17, производится пооЧередное сравнение составляющих входного и выходного сигналов исследуемой системы 16 с одинаковыми частотамипо амялитуде и фазе, таким образом, определяется амплитудно-фазовая частотная характеристика. Предлагаемое устройство позволяет повысить точность определения динамических характеристик нелинейных систем за счет приближения условий к натурным. Как известно, динамика нелинейных систем определяется не только их структурой и параметрами (как у линейной системы), но зависит от начальных условий движения системы. Предлагаемое устройство при исследовании динамики нелиней.ных систем учитывает начальные условия движения, а именно при определении динамической характеристики системы на некоторой частоте ui. вое другие действующие на нее составляющие заданного спектра uif( 0,1, 2,...,N; i # К ) являются для системы начальными условиями, что существенно повьш1ает точность эксперимента. Предлагаемое устройство позволяет исключить этап экспериментальной проверки опытного образца вновь проектируемого изделия системы в реальных условиях, эксплуатации и совместить его с проверкой динамики системы в лабораторных условиях, что сокращает сроки экспериментальной отработки системы, повышает производительность и эффективность разработки.
Si
Sz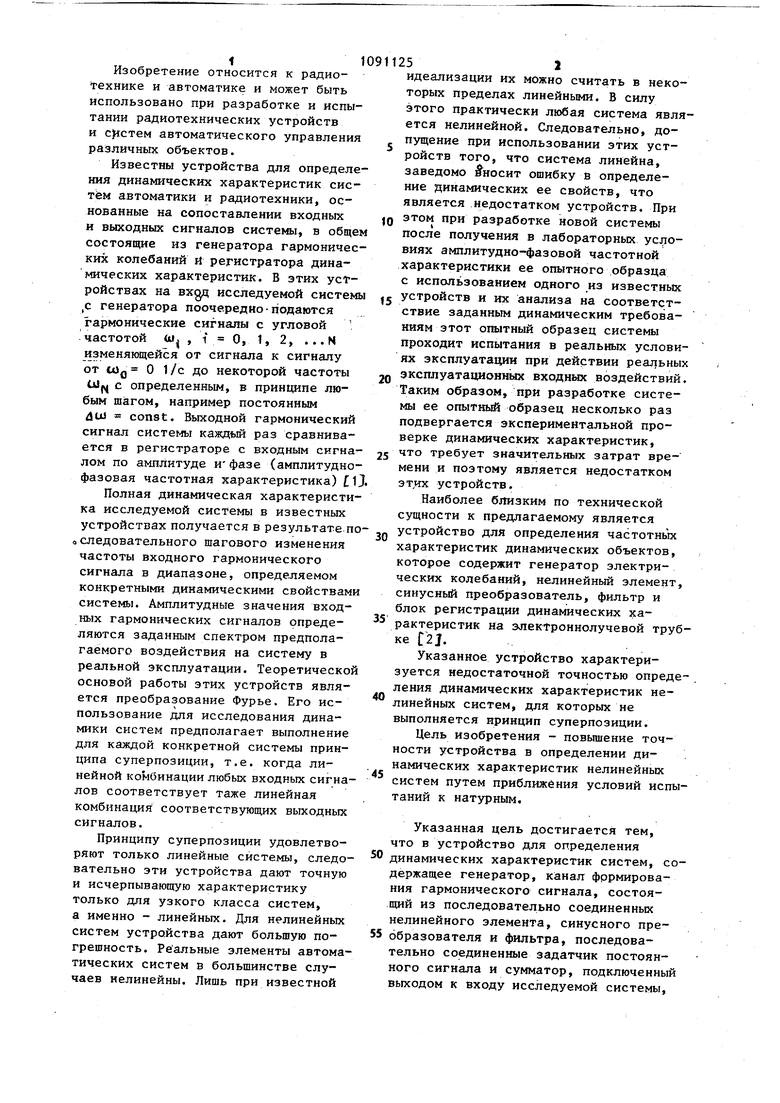
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для определения частотных характеристик динамических объектов | 1981 |
|
SU978067A1 |
| Устройство для диагностики состояния процесса резания | 1983 |
|
SU1122476A1 |
| Узкополосный спектральный анализатор | 1974 |
|
SU485390A1 |
| Анализатор устойчивости динамических систем с обратной связью | 1987 |
|
SU1432423A2 |
| СИСТЕМА МНОГОКАНАЛЬНОЙ ПЕРЕДАЧИ СИГНАЛОВ | 2007 |
|
RU2349041C1 |
| Устройство для определения частотных характеристик систем автоматического регулирования | 1971 |
|
SU443366A1 |
| ЦИФРОВАЯ СИСТЕМА СЕЛЕКЦИИ ДВИЖУЩИХСЯ ЦЕЛЕЙ | 1995 |
|
RU2087006C1 |
| Анализатор устойчивости динамических систем с обратной связью | 1986 |
|
SU1354137A1 |
| КОМПЕНСАТОР ШУМОВОЙ ПОМЕХИ | 1998 |
|
RU2137297C1 |
| УСТРОЙСТВО ГИДРОМЕТЕОРОЛОГОАКУСТИЧЕСКИХ НАБЛЮДЕНИЙ ЗА АКВАТОРИЕЙ МОРСКОГО ПОЛИГОНА | 2005 |
|
RU2300781C1 |
УСТРОЙСТВО ДЛЯ ОПРЕДЕЛЕНИЯ ДИНАМИЧЕСКИХ ХАРАКТЕРИСТИК СИСТЕМ, содержащее генератор,канал формирования гармонического сигнала,состоящий из последовательно соединенных нелинейного элемента, синусного преобразователя и фильтра, последовательно соединенные задатчик постоянного сигнала и сумматор, подключенный выходом к входу исследуемой системы, последовательно соединенные узкополосный регулируемый фильтр, подключенньй входом к выходу исследуемой системы, и блок регистрации, 6 тличающееся тем, что, с целью повьшёния точности устройства, в него введены N -1 каналов формирования сигнала, N усилителей, переключатель, входы N нелинейных элементов соединены с выходом генератора, входы каждого фильтра через соответствующий усилитель подключены к соответствующему входу сумма(Л тора, второй вход блока регистрации соединен через переключатель со всеми входами сумматора.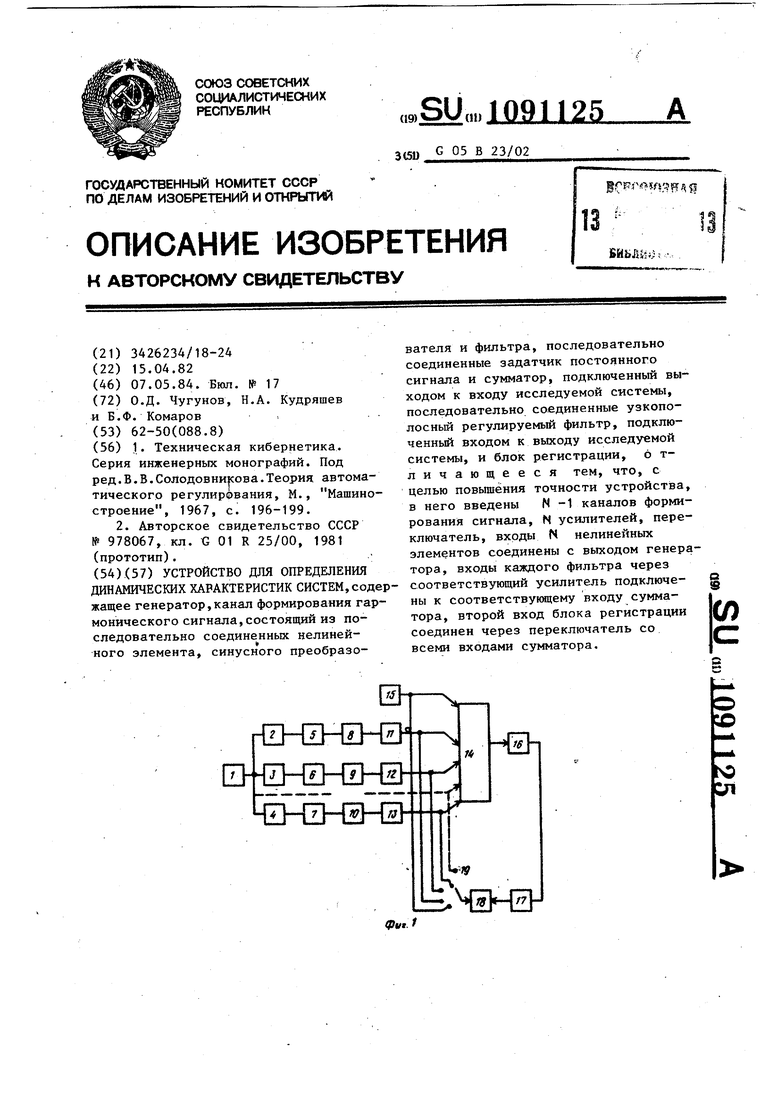
fj.ff (t}f о}г (3 f
-.
A.
...V
S
Т t
фиг. 2
г-гЯ
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Техническая кибернетика | |||
| Серия инженерных монографий | |||
| Под ред.В.В.Солодовникова.Теория автоматического регулирования, М., Машиностроение, 1967, с | |||
| Пылеочистительное устройство к трепальным машинам | 1923 |
|
SU196A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Устройство для определения частотных характеристик динамических объектов | 1981 |
|
SU978067A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
