ключей, n-4 коммутирующих устройств лторой группы, п-3 коммутирующих устройств третьей группы, выходы которы соединены с третьими, четвертыми... входами прогнозирующих моделей, нечетные входы подключены к первому второму, .,., i-му, ..., (п-1)-му выходам объекта управления, входы, за исключением четных входов (п-З)-го коммутирующего устройства,к выходам последующих коммутирующих устройств второй группы, нечетные входы которых соединены с четвертыми пятыми... входами соответствующих прогнозирующих моделей, четггые входы коммутирующих устройств второй группы соединены с выходами..соответствующих прогнозирующих моделей,за исключением последних выходов, первые управляющие входы коммутирующих устройств второй группы соединены с третьими выходами соответствующих блоков управления и. первыми входами ключей, вторые управляющие входы с вторыми входами соответствуюп их блоков управления, управляющие входы коммутирующих устройств третьей группы соединены со вторыми входами, соответствующих ключей и выходами последуюп их ключей, за исключением (п-3)-го коммутирующего устройства, управляюцщй вход которого соединен с третьим выходом (п-2)-го блока управления и вторым входом (п-3)-го ключа, четные вх,оды которого соединены с выходами (п-2)-й прогнозирутащей модели, выходы ключей сое.динены со вторыми, . . . , i-ми:,. . , , (п-2)-ми входами первого элемента ИЛИ, первый вход которого соединен с выходом (п-2)-го ключа, первый вход .которого соединен с выходом первого ключа, второй вход - с выходом функционального преобразователя, выходы которого соединены с первым и вторы выходами объекта управления, первьш вход первого ключа соединен с третьим входом первого блока управления, вторая группа выходов коммутирующих устройств первой группы, за исключением (п-3)-го коммутирующего устройства, подключена ко вторым,третьНМ|.„, входам последующих комм тирующих устройств первой группы.
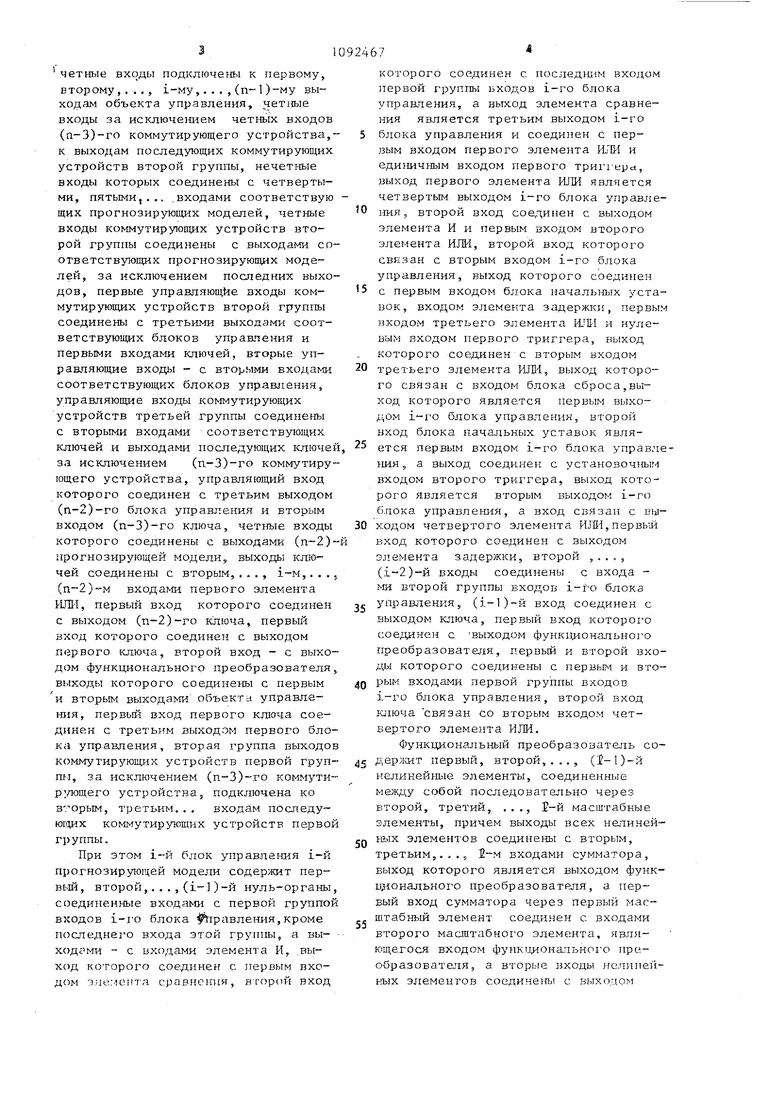
2. Система по п. 1, о т л и ч а ю щ а я с я тем, что i-й блок управления 1-й прогнозирующей модели содержит первый, второй, .,., (1-1)-й нуль-органы, соед 1ненные входами с первой группой входов i-ro блока управления, кроме последнего входа этой группы, а выходами - с входами элемента И, выход которого соединен с первым входом элемента сравнения, второй вход которого соединен с последним входом первой группы входов i-ro блока управления, а выход элемента сравнения является третьим выходом i-ro блока управления и соединен с первым входом первого элемента ИЛИ и единичным входом первого триггера, выход первого элемента ИЛИ является четвертым выходом i-ro блока управления, второй вход соединен с выходом элемента И и первым входом второго элемента ШБ1, второй вход которого связан с вторым входом i-ro блока управления, выход которо го соединен с первым входом блока начальных уставок, входом элемента задержки, первьгм входом третьего элемента ИЛИ и нулевым входом первого триггера, выход которого соединен с вторым входом третьего элемента ИЛИ, выход которого связан с входом блока сброса, выход которого является первым выходом i-ro блока управления, второй вход блока- начальных уставок является первым входом i-ro блока управления, а выход соединен с установочн :.1М входом второго триггера, выход которого является вторым выходом i-ro блока управления а вход связан с выходом четвертого элемента ИЛИ, первый вход которого соединен с выходом элемента зад.ержки, второй,,.., (i-2)-й входы соединены входами второй группы входов i-ro блока управления, (i-l)-й вход соедиЛен с выходом ключа, первый вход которого соединен с выходом функционального преобразователя, первый и второй входы которого соединены с первым и вторым входами первой группы входов I -го блока управления, второй вход ключа соединен с вторым вхрдом четвертого элемента ИЛИо Изобретение относится к системам автоматического управления, предназ начено для оптимального по быстродействию, управления линейными стаци нарными колебательными динамическими объектами п-го порядка, последнее звено которых является интегрирующим, и может быть использовано для управления летательными аппаратами, судами на воздушной подушке, электроприводами и химико-технологи ческими -Процессами. Известна система оптимального уп равления объектами произвольного порядка, содержащая прогнозирующее устройство, блок управления, блок сравнения, сумматор, блок начальных уставок, триггер Однако известная система характе ризуется низкими точностью и быстродействием для объектов управления выше четвертого порядка. Наиболее близкой по технической сущности к изобретению является си тема оптимального управления объект ми произвольного (п-го) порядка,содержащая блок управления, блок начальных уставок, триггер, коммутиру ющее устройство и п-1 прогнозирующее устройство, кпзвдое из которых содержит 2 прогнозирующих моделей, блоков управления (i- максимальный порядок прогнозирующего устройства) и 2 (iy) коммутирующих устройств 2. Недостатком указанной системы я ляется высокая аппаратурная сложность вследствие многократного дублирования моделей низких порядков при использовании их в прогнозирующих моделях высоких порядков. Цель изобретения - сокращение аппаратурных затрат. Поставленная цель достигается тем, что в систему, содержащую пер вую, вторую,...,1-ю, ..., (п-2)-ю прогнозирующие модели, выходы которых соединены с первой группой входов, число которых равно порядк соответствующих прогнозирующих моделей, первого, второго,...,i-ro, ...,(п-2)-го блоков.управления, первые и вторые выходы которых под ключены к первым и вторым входам с ответствующих прогнозирующих моделей, состоящих из последовательно соединенных колебательного звена и динамических звеньев первого порядка, последнее из которых - ин 2 тегрирующее, третьи выходы блоков управления подключены к первым входам последующих коммутирующих устройств первой группы, за исключением (п-2)- го блока управления, и первым управляющим входам соответствующих коммутирующих устройств первой группы, за исключением первого блока управления, первая группа выходов .которых подключена к второй группе входов, число которых равно порядку соответствуроцих прогнозирующих моделей минус три, второго,..., i-ro, ..., (п-2)-го блоков управления, третий выход (п-2)-го блока управления подключен к (п-1)-му входу первого элемента ИЛИ, выход которого соединен со счетным входом триггера,выход которого подключен к входу объекта управления, первый, второй, ... i-й,..., (п-1)-й выходы которого подключены к (п+2)-му, (п+1)-му,..., (1+2)-му, ..., четвертому входам (п-2)-и прогнозирующей мод.б;ли, а п-й выход объекта управления соединен с вторым входом блока сравнения, первый вход которого соединен с внешним.источником задающего воздействия, выход блока сравнения соединен с п-м входом (п-2)-й прогнозирующей модели, с. первым входом (п-2)-го блока уп- равления и со входом . блока начальных уставок, вьЕход которого соединен с установочным входом триггера, с вторым входом (п-2)-го блока управлеНИН, с вторым управляющим входом (п-2)-го коммутирующего устройства первой группы и с первыми входами второго, ..., i-ro,..., (п-2)-го элементов ИЛИ, выходы которых и подключены к вторым входам соответствующих блоков управления и вторым управляющим входам соответствующих коммутирующих устройств первой группы, кроме второго элемента ИЛИ, первые входы блоков управления, кроме (п-2)-го, подключены к третьим входам соответствующих прогнозирующих моделей, четвертые выходы второгоу... i-ro, ..., (п-2)-го блоков управления подключены ко вторым, третьим... входам всех предьщущих элементов ИЛИ, дополнительно введены функциональный преобразователь, п-2 ключей, п-4 коммутирующих устройств второй группы, п-З коммутирующих устройств третьей группы, выходы которых соединены с третьи ш, четвертыми ... входами прогнозирующих моделей,нечетные входы подключены к первому, второму,..,, i-му,...,(п-1)-му выходам объекта управления, четные входы за исключением четных входов (п-З)-го коммутирующего устройства, к выходам последующих коммутирующих устройств второй группы, нечетные входы которых соединены с четвертыми, пятыми,... ,входами соответствую щях прогнозирующих моделей, четные входы коммутирующих устройств второй группы соединены с выходами со ответствующих прогнозирующих моделей, за исключением последних выхо дов, первые управляющие входы коммутирующих устройств второй группы соединены с третьими выходами соответствую111;их блоков управления и первыми входами ключей, вторые управляющие входы - с вторыми входами соответствующих блоков управления, управляющие входы коммутирующих устройств третьей группы соединены с вторыми входами соответствующих ключей и выходами последующих ключе
за исключением (п-З)-го коммутирующего устройства, управляющий вход которого соединен с третьим выходом (п-2)-го блока управления и вторым входом (п-З)-го ключа, четные входы которого соединены с выходами (п-2)прогнозирующей модели, выходы ключей соединены с вторым,,.., i-M,..., (п-2)м входами первого элемента ИЛ, первый вход которого соединен с выходом (11-2)-го ключа, первьш вход которого соединен с выходом первого ключа, второй вход - с выходом функционального преобразователя, выходы которого соединены с первым и вторым выходами объекта управления, первьй вход первого ключа соединен с третьим выходом первого блока управления, вторая группа выходов коммутирующих устройств первой группы, за исключением (п-З)-го коммутир лощего устройства, подключена ко в.орым, третьим. . . входам последуюр их коммутирующих устройств первой группы.
При этом i-й блок управления i-й прогнозируюрдей модели содержит первый, второй,...,(i-1)-и нуль-органы, соединенные входами с первой группой входов i-ro блока «правления,кроме последнего входа этой группы, а вы- ходами - с входами элемента И, ,выход которого соединен с первым входом э.иемента сравнения, второй вход
ПИЯ, а выход соединен с установочны входом второго триггера, выход которого является вторым выходом i-ro блока управления, а вход связан с выходом четвертого элемента ИЛИ,первьй вход которого соединен с выходом элемента задержки, второй ,..., (1-2)-и входы соединены с входа ми второй группы входов i-fo блока управления, (i-l)-й вход соединен с выходом ключа, первый вход которохо соединен с выходом функционального преобразователя, первый и второй входы которого соединены с первым и вторым входами первой группы входов i-ro блока управления, второй вход ихюча связан со вторым входом четвертого элемента ИЛИ.
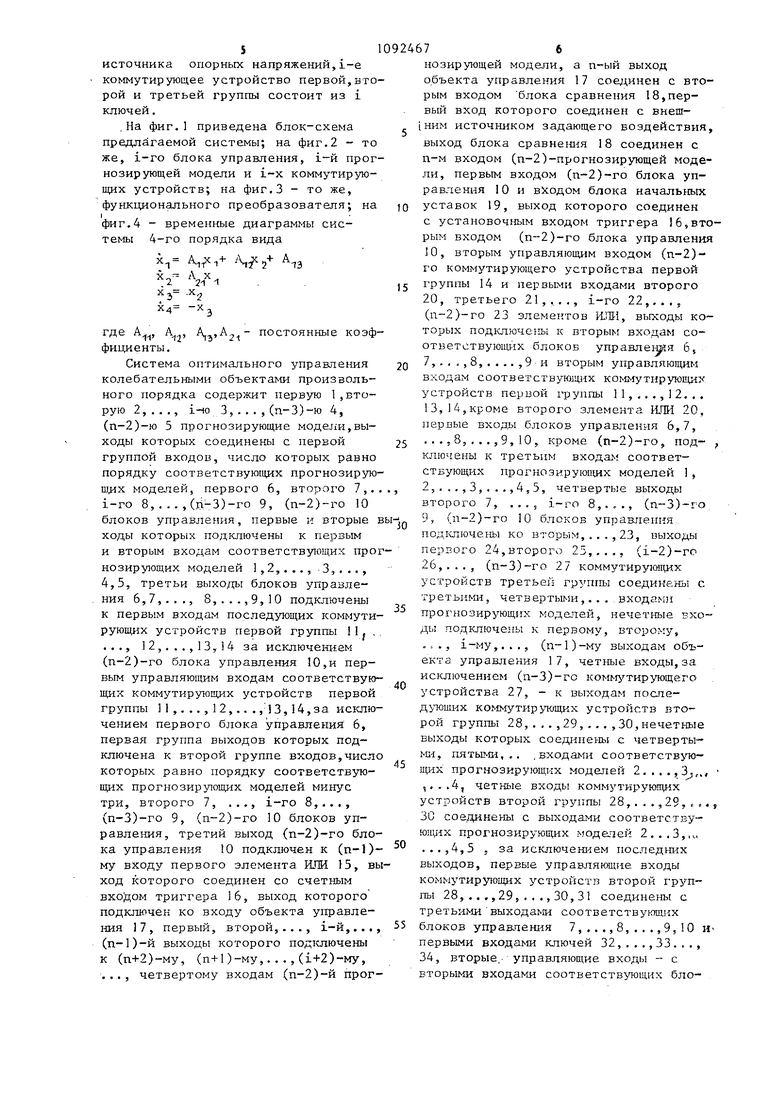
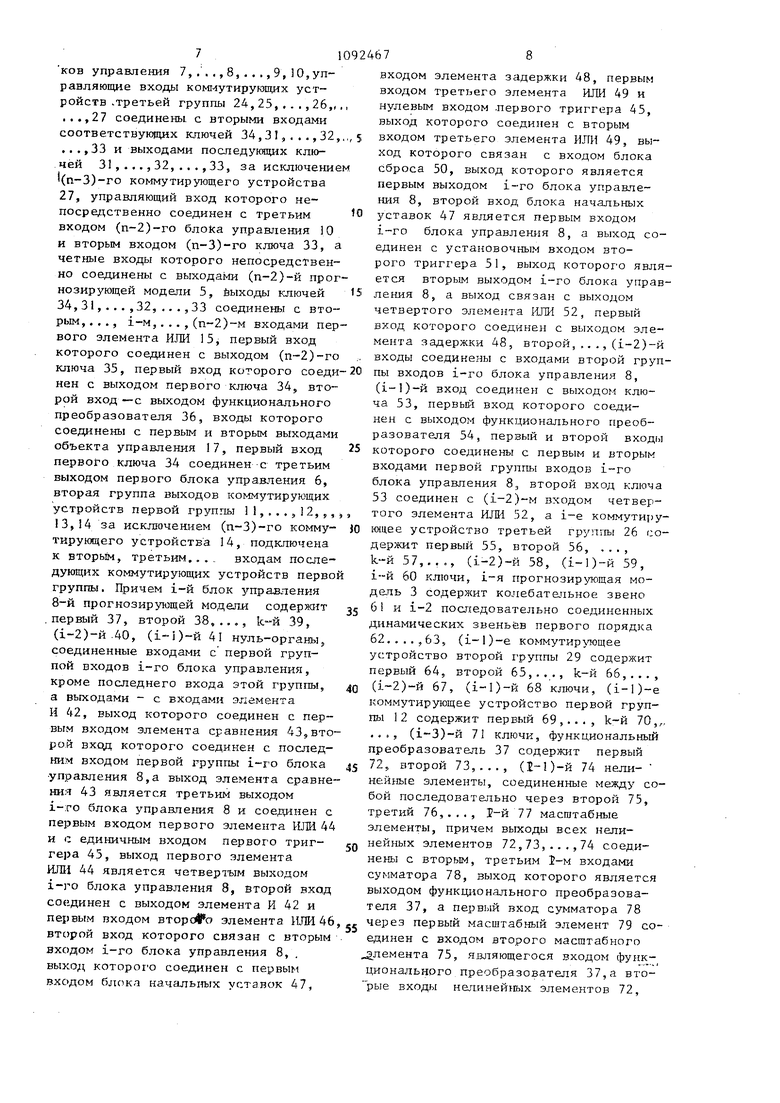
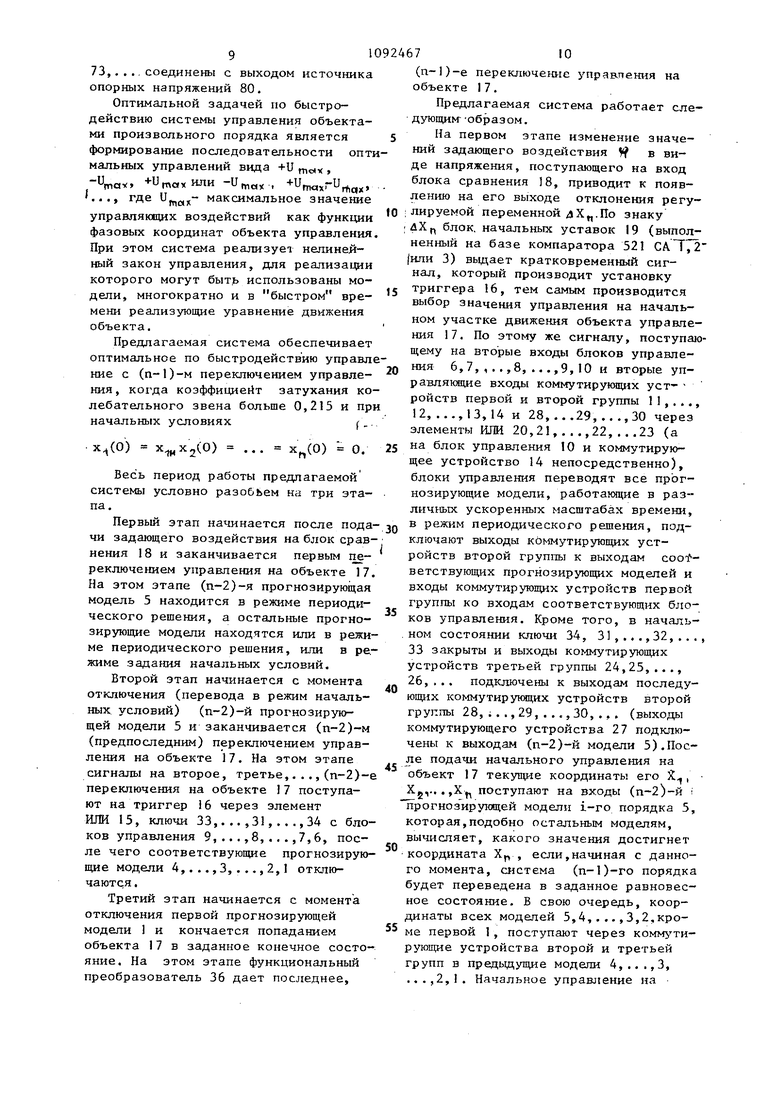
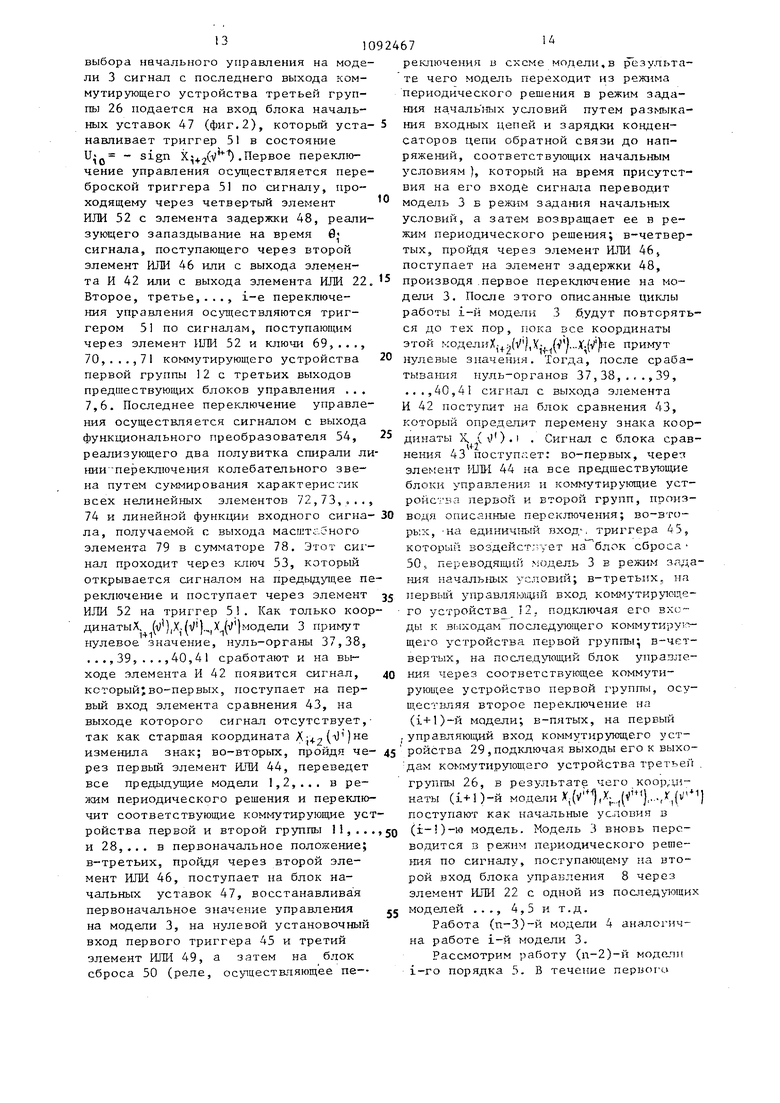
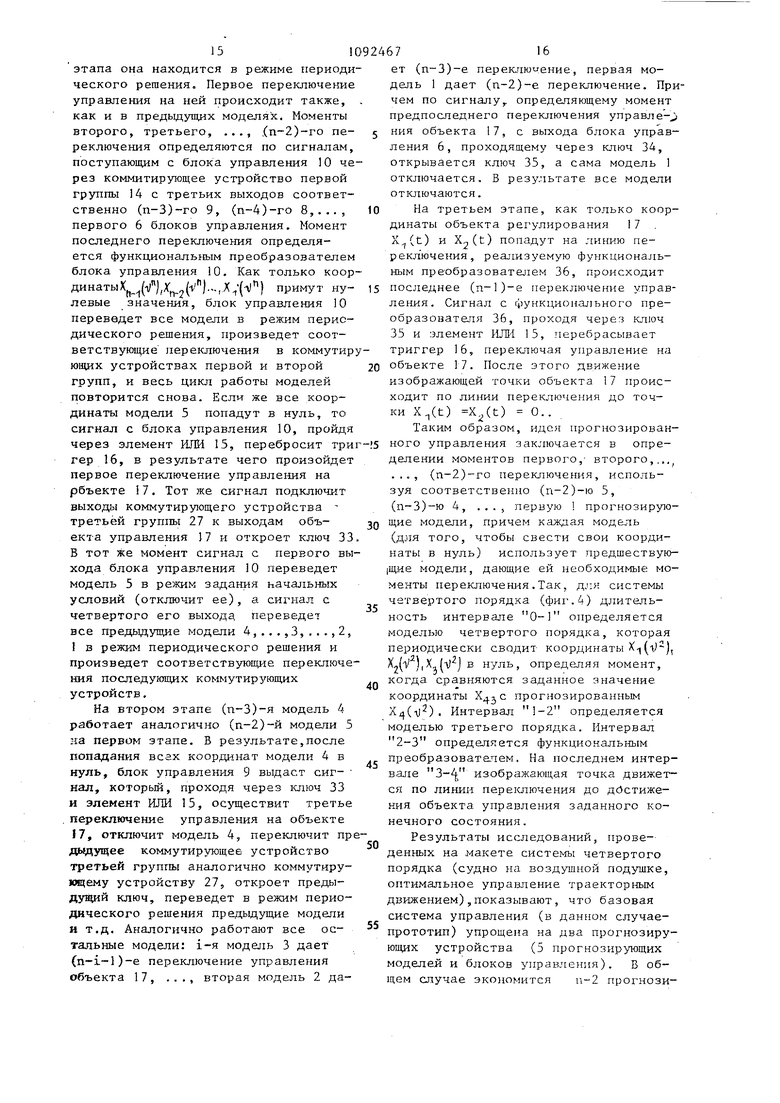
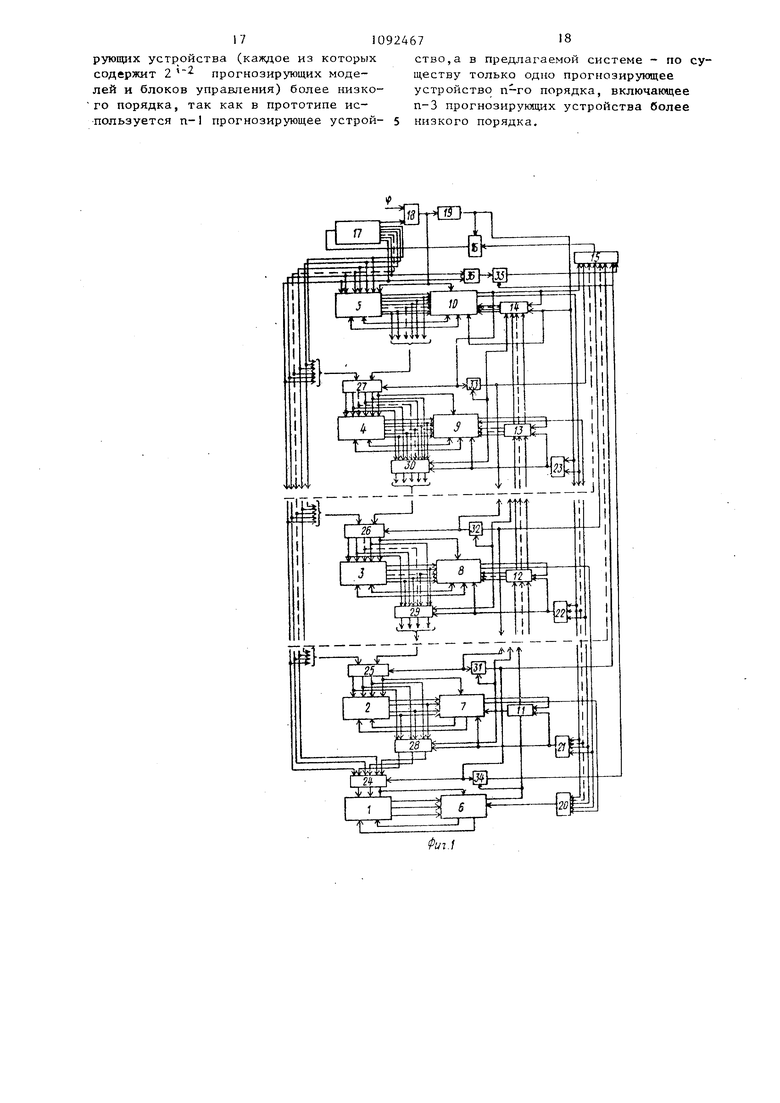
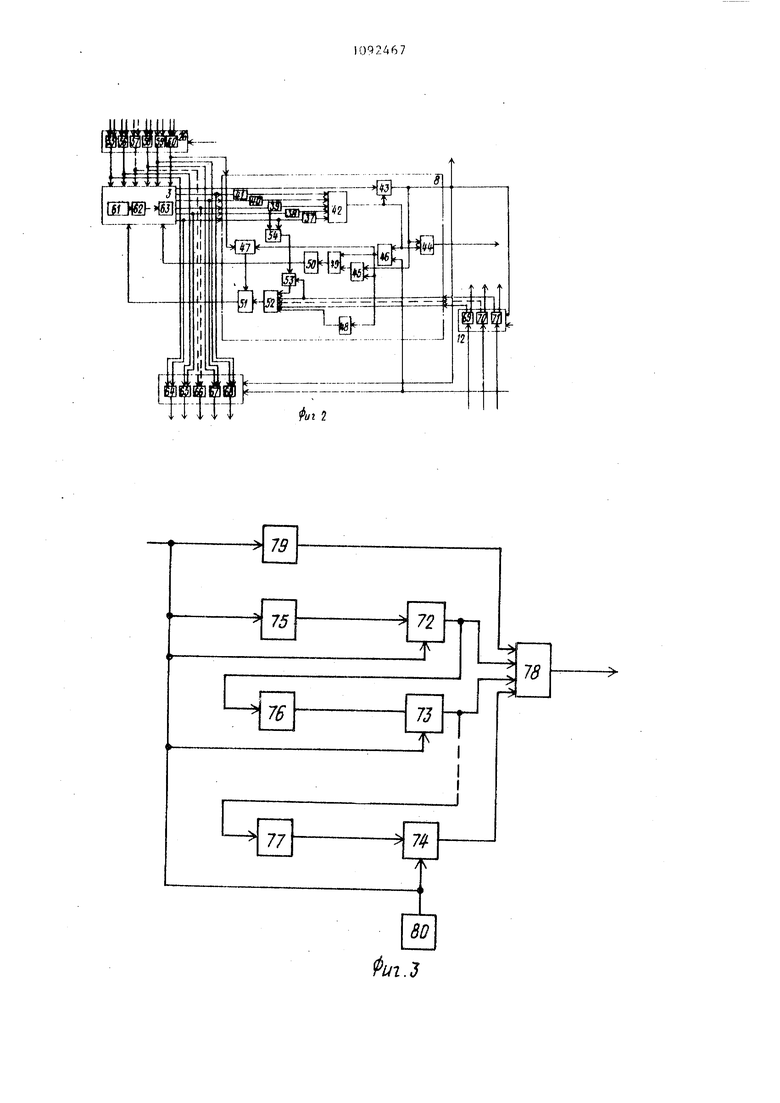
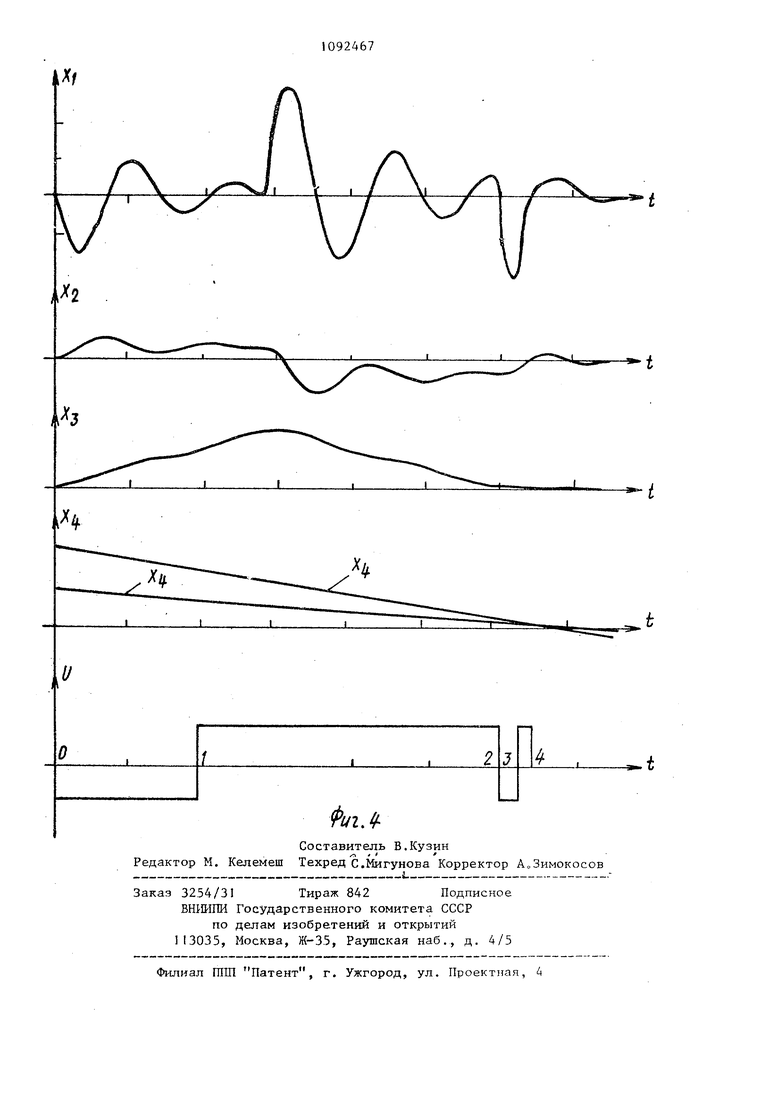
Функциональный преобразователь со5 дерлшт первый, второй,..., (1-1)-й нелинейные элементы, соединенные между собой последовательно через второй, третий, ..., Е-й масштабные элементы, причем выходы всех нелинейных элементов соединены с вторым, третьим,..,5 2-м входами сумматора, выход которого является выходом функDj-iOHajibHoro преобразователя, а, первый вход сумматора через первый масштабный элемент соединен с входами второго масштабно1о элемента, являющегося входом функт1 1Онапьного преобразователя, а вторые входы нелипейbjbix элементов соединены с выходом которого соединен с последним входом первой группы входов i-ro блока управления, а выход элемента сравнения является третьим выходом i-ro блока управления и соединен с первым входом первого элемента $-ИИ и единичным входом первого триггер, выход первого элемента ИЛИ является четвертым выходом i-ro блока управления, второй вход соеди ен с выходом элемента И и первым входом второго элемента ИШ, второй вход которого связан с вторым входом i-ro блока управления, выход которого соединен с первым входом блока начальнъх уставок, входом элемента задержк, первым входом третьего элемента ШМ и нулевым входом первого триггера, выход которого соединен с вторым входом третьего элемента ШП1, выход которого связан с входом блока сброса, которого является первым выходом i-ro блока управления, второй вход блока начальных уставок является первым входом i-ro блока управлеисточника опорных напряжений,1-е коммутирующее устройство первой,вто рой и третьей группы состоит из i ключей. .На фиг,1 приведена блок-схема предлагаемой системы; на фиг.2 - то же, i-ro блока управления, i-й прог нозирующей модели и L-X коммутирующих устройств; на фиг.З - то же, функционального преобразователя; на фиг.4 - временные диаграммы системы 4-го порядка вида XT Л,,+ .V5+ А 2 V-i Xj- .Х Х4 -Xj где А, А, А,з, постоянные коэф фициенты. Система оптимального управления колебательными объектами произвольного порядка содержит первую 1,вторую 2,..., i-io 3, . . . , (п-З)-ю 4, (п-2)-ю 5 прогнозирующие моде1ш,выходы которых соединены с первой группой входов, число которых равно порядку соответствующих прогнозирую моделей, первого 6, второго 7,. 1-го 8,...,(й-3)-го 9, (п-2)-го 0 блоков управления, первые и вторые ходы которых подключены к первым и вторым входам соответствующих про нозирующих моделей 1,2,..., -3,. .., 4,5, третьи выходы блоков управления 6,7,..., 8,...,9,10 подключены к первым входам последующих коммути рующих устройств первой группы Ij . . ., 12,. . .,13,4 за исключением (п-2)-го блока управления 0,и первым управляющим входам соответствуго ш;их коммутирующих устройств первой группы 11,...,12,...,13,14,за исклю чением первого блока управления 6, первая группа выходов которых подключена к второй группе входов,числ которых равно порядку соответствующих прогнозирующих моделей минус три, второго 7, ..., i-ro 8,..,, (п-З)-го 9, (п-2)-го 10 блоков управления, третий выход (п-2)-го бло ка управления 10 подключен к (п-1) му входу первого элемента ИЛИ 15, в ход которого соединен со счетным входом триггера 16, выход которого подключен ко входу объекта управления 17, первый, второй,..., i-й,... (п-1)-й выходы которого подютючены к (п+2)-му, (п+1)-му,...,(i+2)-My, ..., четвертому входам (п-2)-й прог позирующей модели, а п-ый выход объекта управления 17 сое;;инен с вторым входом блока сравнения 18,первый вход которого соединен с внешним источником задающего воздействия, выход блока сравне тя 18 соединен с п-м входом (п-2)-прогнозирующей модели, первым входом (п-2)-го блока управления 10 и входом блока начальных уставок 19, выход которого соединен с установочным входом триггера 16,вторым входом (п-2)-го блока управления JG, вторым управляющим входом (п-2)го коммутирующего устройства первой группы 14 и иервььми входами второго 20, третьего 21,.,.., 1-го 22,..,,. (п-2)-го 23 элементов ИЛИ, выходы которых подключе51ы к вторым входам соответствуюищх блоков управле11(я б, 7,.,.,8,....,9и вторым управляющим входам соответствующих коммутирующих устройств первой группы 11,,..,12,,, 13,14,кроме второго элемента ИЛИ 20, первые входы блоков управления 6,7, ...,8,...,9,10, кроме (п-2)-го, под- , ключены к третьим входам соответствующих прогнозируюпц1Х моделей 1 , 2,,..,3,...,4,5, четвертые выходы второго 7, ,.., i-ro 8,..., ()-го 9, (п-2)-го 10 блоков управления под1члючены ко вторым, ,.., 23, выходы первого 24,BTOporv) 25,..., (i-2)-ro 26,. . . , (п-3)го 27 коммутиругадих устройств третьей группы соединень с третьими, четвертыьш,,.. входами прогнозирующих моделей, нечетные входь подключены к первому, второму, ... ., i-му,. . ., ( )-му выходам объекта управления 17, четные входы,за исключением (п-З)-го KOMNtyтирующего , устройства 27, - к выходам последующих коммутирующих устройств второй группы 28,...,29,...,30,нечетные выходы которых соединень с четвертыми, пятыми,,. ,входами соответствуюя|;их прогнозирующих моделей 2..,,,3.,., ,,..4, четные входы коммутирующих устройств второй группы 28,. . .,29, , ..J 30 соединены с выходами соответству- прогнозирующих )oдeлeй 2...3,,м ...,4,5 . за исключением последних выходов, первые управляющие входы коммутирзпощих устройств второй группы 28,,,,,29,,,,,30,31 соединены с третьими выxoдa Iи соответствующих блоков упраапения 7, , , ,,8,,. .,9,10 нпервыми входами ключей 32,,..,33..., 34, вторые. управляющие входы -- с вторыми входами соответствующих блоков управления 7,,,,,8, ..,,9,10,управляющие входы ком1-1утирую1цих устройств .третьей группы 24, 25, , . ., 26,, ,..,27 соединены с вторыми входами соответствующих ключей 34,3 1, . .., 32, ,..,33 и выходами последующих ключей 31, ...,32,...,33, за исключение (п-З)-го коммутирующего устройства 27, управляющий вход которого непосредственно соединен с третьим входом (п-2)-го блока управления 10 и вторым входом (п-З)-го ключа 33, а четные входы которого непосредственно соединены с выходами (п-2)-й прог нозирующей модели 5, Ёыходы ключей 34,3I,...,32,...,33 соединены с вторым, ..., i-M,...,(п-2)-м входами пер вого элемента ИЛИ 15, первый вход которого соединен с выходом (п-2)-го ключа 35, первый вход которого соеди нен с выходом первого ключа 34, второй вход-с выходом функционального преобразователя 36, входы которого соединены с первым и вторым выходами объекта управления 17, первый вход первого ключа 34 соединен-с третьим выходом первого блока управления 6, вторая группа выходов коммутирующих устройств первой группы 1 1,..., 1 2,,, 13,14 за исключением (п-З)-го коммутирующего устройства 14, подключена к BTopbiM, третьим..... входам последующих коммутирующих устройств перво группы. Причем i-й блок управления 8-й прогнозирующей модели содержит .первый 37, второй 38,..., 1с--й 39, (1-2)-й .40, (1-0-й 41 нуль-органы соединенные входами с первой группой входов i-ro блока управления, кроме последнего входа этой группы, а выходами - с входами элемента Н 42, выход которого соединен с первым входом элемента сравнения 435вто ро.й вкод которого соединен с последни.м входом первой группы i-ro блока управления 8,а выход элемента сравне ния 43 является третьим выходом i-ro блока упраапения 8 и соединен с первым входом первого элемента ИЛИ 44 и с единичным входом первого триггера 45, выход первого элемента ИЛИ 44 является четвер1Ъ1М выходом i-ro блока управления 8, второй вход соединен с выходом элемента И 42 и первым входом вторсЛо элемента ИЛИ 46 второй вход которого связан с вторым входом i-ro блока управления 8,. выход которого соединен с первым входом блсжа начальных уставок 47, входом элемента задержки 48, первым входом третьего элемента ИЛИ 49 и нулевым входом .первого триггера 45, выход которого соединен с вторым входом третьего элемента ИЛИ 49, выход которого связан с входом блока сброса 50, выход которого является первым выходом i-ro блока управления 8, второй вход, блока начальных уставок 47 является первым входом i-ro блока управления 8, а выход соединен с установочным входом второго триггера 51, выход которого является вторым выходом i-ro блока управления 8, а выход связан с выходом четвертого элемента ИЖ 52, первый вход которого соединен с выходом элемента задержки 48, второй, ..., (i-2)-A входы соединены с входами второй группы входов i-ro блока управления 8, Ci-l)-й вход соединен с выходом ключа 53, первый вход которого соединен с выходом функционального преобразователя 54, первый и второй входы которого соединены с первым и вторым входами первой группы входов i-ro блока управления 8, второй вход ключа 53 соединен с (i-2)-M входом четвертого элемента ИЛИ 52, а i-e коммути1)угацее устройство третьей группы 26 содержит первый 55, второй 56, ..., k-й 57,..., (i-2)-й 58, (i-l)-й 59, i-й 60 ключи, i-я прогнозирующая модель 3 содержит колебательное звено 6 i и i-2 последовательно соединенных динамических звеньев первого поряд)са 62.... .,63, (i-l)-e коммутир тощее устройство второй группы 29 содержит первый 64, второй 65,..., k-й 66,..., ()-й 67, (i-I)-й 68 KJШчи, (i-I)-e коммутирующее устройство первой группы 12 содержит первый 69,..., k-й 70,,, ..., (i-3)-A 71 ключи, функциональный преобразователь 37 содержит первый 72, второй 73,..., (2-1)-й 74 нелиней}яые элементы, соединенные между собой последовательно через второй 75, третий 76,. . . , Т2-Й 77 масштабные элементы, причем выходы всех нелинейных элементов 72,73,...,74 соединены с вторым, третьим J-M входами сумматора 78, выход которого является выходом функционального преобразователя 37, а первый вход сумматора 78 через первый масштабный элемент 79 соединен с входом второго масштабного элемента 75, яштяющегося входом функционального преобразователя 37,а входы нел.инейных элементов 72, 73,,.., соединены с выходом источника опорных напряжений 80. Оптимальной задачей по быстродействию системы управления объектами произвольного порядка является формирование последовательности опти мальных управлений вида +U „«х -Un,av «итахили , UmaxrUrhax ..., где mo(x максимальное значение управляющих воздействий как функции фазовых координат объекта управления При этом система реализует нелинейный закон управления, для реализации которого могут быть использованы модели, многократно и в быстром времени реализующие уравнение движения объекта. Предлагаемая система обеспечивает оптимальное по быстродействию управл ние с (n-l)-M переключением управления , когда козффициейт затухания ко лебательного звена больше 0,215 и пр начальных условияхf х(0) О. х(0) X Весь период работы предлагаемой системы условно разобьем на три эта- па. Первый этап начинается после пода чи задающего воздействия на блок срав нения 18 и заканчивается первым переключеьшем управления на объекте 17 На этом этапе (п-2)-я прогнозирующая модель 5 находится в режиме периодического решения, а остальные прогнозирующие модели находятся или в режи ме периодического решения, или в ре жиме задания начальных условий. Второй этап начинается с момента отключения (перевода в режим начальных условий) (п-2)-й прогнозирующей модели 5 и заканчивается (п-2)-м (предпоследним) переключением управления на объекте 17. На этом этапе сигналы на второе, третье,...,(п-2)- переключения на объекте 7 поступают на триггер 6 через элемент ИЛИ 15, ключи 33,...,31,...,34 с бло ков управления 9,...,8,...,7,6, после чего соответствующие прогнозирую щие модели 4,...,3,...,2,1 отключаются . Третий этап начинается с момента отключения первой прогнозирующей модели 1 и кончается попаданием объекта 17 в заданное конечное состо яние. На этом этапе функциональный преобразователь 36 дает последнее. (n-l)-e переключение управпения на объекте 17. Предлагаемая система работает следующим- -образом. На первом этапе изменение значений задающего воздействия в виде напряжения, поступающего на вход блока сравнения 18, приводит к появлению на его вь1ходе отклонения регулируемой переменной 4Х„.По знаку ДХ„ блок, начальных уставок 19 (выполненный на базе компаратора 521 или 3) выдает кратковременный сигнал, который производит установку триггера 16, тем самым производится выбор значения управления на начальном участке движения объекта управления 17. По этому же сигналу, поступающему на вторые входы блоков управления 6,7,,..,8,...,9,10 и вторые управляющие входы коммутирующих уст- ройств первой и второй группы 11,..., 12,...,13,14 и 28,...29,.. .,30 через элементы ИЛИ 20,21,...,22,...23 (а на блок управления 10 и коммутирующее устройство 14 непосредственно), блоки управления переводят все прогнозирующие модели, работакщие в различных ускоренных масштабах времени, в режим периодического решения, подключают выходы коь мутирующих устройств второй группы к выходам coofветствующих прогнозирующих моделей и входы коммутирующих устройств первой группы ко входам соответствующих блоков управления. Кроме того, в начальном состоянии ключи 34, 31, ...,32,..., 33 закрыты и выходы коммутирующих устройств третьей группы 24,25,..., 26,,.. подключены к выходам последующих коммутирующих устройств второй группы 28,i..,29,...,30,.,. (выходы коммутирующего устройства 27 подключены к выходам (п-2)-й модели 5).После подачи начального управления на объект 17 текущие координаты его Х, Xj,...,X,, поступают на входы (п-2)-й . прогнозирующей модели i-ro порядка 5, которая,подобно остальным моделям, вычисляет, какого значения достигнет координата Х , если,начиная с данного момента, система (n-l)-ro порядка будет переведена в заданное равновесное состояние. В свою очередь, координаты всех моделей 5,4,...,3,2,кроме первой 1, поступают через коммутирующие устройства второй и третьей групп в предьщущие модели 4,...,3, ...,2,1. Начальное управление на модели 5 выбирается аналогично управлению на объекте I7 путем подачи сигнала с выхода блока сравнения 13 на первый вход блока управления iO, а на остальных моделях - путем подачи CHraaj oB с последних выходов соответствующих коммутирующих устройст третьей группы на те же входы блоков управления. Первая модель в ускоренном масштабе времени решает укорочен ную на .п-3 порядка систему уравнений (третьего порядка) динамики объекта. После задания начального уп равления на вход модели в виде Ц --Sto-t и N IfV -t/iri -текущее время реше° и1 2 1 п-2 1 ния 1-й модели; т m.m т 7 - масш табы времени . первой, второй, ..., 1-й,. .,,,(п-2)-й моделей) спустя некоторо время6j( в - время реакции моде ли на входное воздействие) сигналом блока управления 6 осуществляется пер вое переключение модели 1, Момент второго переклвочения опреде ляется функциональным преобразователем, входягцим в блок управления 6, п сле чего координаты модели IX (), X(V принимают нулевое значение. Тогда блок управления 6 кратковременно пере водит модель 1 в режим задания началь ных условий, после чего восстанавливается первоначальное упраштение на модели .1 и она переводится в режим периодического решения и т,д.Это повто ряется до тех пор,пока элемент сравнения блока управления 6 не определит пе-.г X / ,)i .. ( i ремену знака координат Xj (-1)0 npHX(( О, что свидетельствует о прохождени отобралсающей точки модели через начало координат в трехмерном пространстве, В результате, сигнал с блока управления 6 поступает через ком.мутирутощее устройство первой группы 1I на вход блока управления 7, кото,рый производит второе переключение управления на модели 2, решающей .систему уравнений четвертого порядка Первое переключение в этой модели, хак и в остальных, производится -ера;зу же после поступления начальных условий спустя некоторый отрезок времени. Одновременно блок упоавления 6 переводит модель 1 в режим задания начальных условий до тех пор, пока сигнал с последующей модели 2 не переведет ее в прежний режим. Третье переключение управления на второй модели 2 производится блоком управления 7 аналогично первой модели I и, как только координаты .(.,,ели 2 принут нулевое значение, блок управления 7 кратковременно переведет модель 2 в режим начальных условий, а сигнал с четвертого выхода блока управления 7 через элемент ИЛИ 20 поступит на блок управления 6, переводя модель в режим периодического решения , Весь цикл работы первой и второй моделей повторяется до тех пор, пока элемент сравнения блока управле1-шя 7 не определит перемену знака координаты Х (V ) при Хд f v2).X,,((,( О, в результ ате чего сигнал с третьего блсгка управления 7 поступает вььхода через последугощее коммутируюш.ее устройство первой группы на вход последующего блока управления, который производит второе переключение управления на третьей прогнозирующей модели пятого порядка. Одновремень;о с этим блок управления 7 пе1эеводит модель 2 в режим задания начальных условий, модель 1 - J3 режим периодр ческого решения, подключает вход коммутирующего устройства 11 к входу последующего коммутирующего устройства этой группы, а выходы коммутирующего устройства третьей группы 25 подключает ко входам коммутирующего устройства этой группы 24 посредством коммутирующего устройства второй 1руппы 28. В результате координаты |Э Y /,)il третьей моделиХ,/-)), Xo(V)r X (т)/ постуnafOT как начальное условие в модель 1 . Как только координаты i попадут в нуль, блок управления 6 выдаст сигнал, который пройдет через коммутирующее устройство 1 1 и последуюцдее коммутирующее устройство этой группы на вход блока управления третьей моделью, определяя третье (предпоследнее) переключение этой модапи. Последнее переключение управления ею произойдет по .сигналу с соответствующего блока управления. После попадания четырех координат третьей модели Х(л|3| Хз(у),Х2(-)(Х(г)в нуль первая и вторая модели 1 и 2 переведутся в режим периодического решения, коммутирующие устройства первой и второй группы 1I и 28 переключатся в прежнее положение, и описанный 1щкл работы будет повторяться до тех пор, пока все пять координат третьей модели не попадут в нуль и т.д. Рассмотрим работу i-й прогнозирующей модели (2)го порядка З.Для -1 выбора начального управления на модели 3 сигнал с последнего выхода коммутирующего устройства третьей группы 26 подается на вход блока начальных уставок 47 (фиг.2), который устанавливает триггер 51 в состояние Ujj - sign .Первое переключение управления осуществляется переброской триггера 51 по сигналу, проходящему через четвертый элемент ИЛИ 52 с элемента задержки 48, реализующего запаздывание на время 0« сигнала, поступающего через второй злемент ИЛИ 46 или с выхода элемента И 42 или с выхода элемента ИЛИ 22 Второе, третье,. . ., i-e переключения управления осуществляются триггером 51 по сигналам, поступающим через элемент ИЛИ 52 и ключи 69,..,, 70,...,71 коммутирующего устройства первой группы 12 с третьих выходов предшествующих блоков управления ... 7,6. Последнее переключение управления осуществляется сигналом с выхода функционального преобразователя 54, реализующего два полувитка спирали ли нии переключения колебательного звена путем суммирования характеристик всех нелинейных элементов 72,73,..., 74 и линейной функции входного сигнала, получаемой с масштс-бного элемента 79 в сумматоре 78. Этот си1нал проходит через ключ 53, который открывается сигналом на предыд тдее пе реключение и поступает через элемент ИЛИ 52 на триггер 51. Как только коор динатыХ, ()|XДV).,,X(/|мoдeли 3 примут 1-гулевое значение, нуль-органы 37,38, . . .,39,.. .,40,41 сработают и на выходе элемента И 42 появится сигнал, который;во-первых, поступает на первый вход элемента сравнения 43, на выходе которого сигнал отсутствует,так как старшая координата Л.2() изменила знак; во-вторых, пройдя через первый элемент ИЛИ 44, переведет все предыдущие модели 1,2,... в режим периодического рещения и переключит соответствующие коммутирующие уст ройства первой и второй группы ,.. и 28,... в первоначальное положение; в-третьих, пройдя через второй элемент ИЛИ 46, поступает на блок начальных уставок 47, восстанавливая первоначальное значение управления на модели 3, на нулевой установочный вход первого триггера 45 и третий элемент ИЛИ 49, а затем на блок сброса 50 (реле, осу1цествляющее пе- 67 реключения в схеме модели,в результате чего модель переходит из режима периодического решения в режим задания на.чальных условий путем разм1 1кания входных цепей и зарядки конденсаторов цепи обратной связи до напряжений, соответствующих начальным условиям ), который на время присутствия на его входе сигнала переводит модель 3 в режим задания начальных условий, а затем возвращает ее в режим периодического решения; в-четвертых, пройдя через элемент ИЛИ 46, поступает на элемент задержки 48, производя .первое переключение на мо 3. После этого описанные циклы работы i-й модели 3 будут повторяться до тех пор, пока все координаты этой моделиХ,.;,(У),К.,{1|...Х-.(У)1-1е примут нулевые значения. Тогда, после срабатывашш нуль-органов 37, 38, . , ., 39, ...,40,41 сигнал с выхода элемента И 42 постуг ит на блок сравнения 43, который определит перемену знака координаты X, ()).| . Сигнал с блока сравнения 43 поступает: во-первых, черег ШМ 44 на все предшествующие блоки управления и коммутирующие устройства первой и второй групп, производя описанные переключения; во-вторых, -на единичный вход;, триггера 45, который воздейстг/уег на блок сброса 505 переводящ.нй модель 3 в режим за/;ания началыгых условий; в-треты Х. на лервьЕЙ управляюиц5й вход коммутирующего устройства 2. подключая его входы к выходам последующего коммуткру- щего устройства первой группьц в-чствертых, на пocлeд таш iй блок управления через соответствующее коммутирующее устройство первой группы, осуществляя второе переключение на (1+1)й модели; в-пятых, на первый .управляющий вход коммутирующего устройства 29 , подключая выходы его к выходам коммутирующего устройства третьей , rpvnnbi 26, в результате чего Koop yiнаты (14-1)-й модели X,(v,X..(,,..,r,() поступают как начальные условия в (i-l)-M модель. Модель 3 вновь переводится в режим периодического решения по сигналу, поступающему на второй вход блока управления 8 через элемент ИЛИ 22 с одной из последующих моделей ..., 4,5 и т.д. Работа (и-З)-й модели 4 аналогична работе i-й модели 3. Рассмотрим работу (п-2)-й модели i-ro порядка 5. В течение первого 15 этапа она находится в режиме периоди ческого регаения. Первое переключение управления на ней происходит также, как и в предьщущих моделях. Моменты второго, третьего, ..., ,(п-2)-го переключения определяются по сигналам поступающим с блока управления 10 че рез коммитирующее устройство первой группы 14 с третьих выходов соответственно (п-З)-го 9, (п-4)-го 8,..., первого 6 блоков управления. Момент последнего переключения определяется функциональным преобразователем блока управления 10. Как только коор динатыХ(/),()-.Х;() примут нулевые значения, блок управления 10 переведет все модели в режим периодического решения, произведет соответствующие переключения в коммутир ющих устройствах первой и второй групп, и весь цикл работы моделей повторится снова. Если же все координаты модели 5 попадут в нуль, то сигнал с блока управления 10, пройдя через элемент ИЛИ 15, перебросит три гер 16, в результате чего произойдет первое переключение управления на рбъекте }7. Тот же сигнал подключит выходы коммутирующего устройства третьей группы 27 к выходам объекта управления 17 и откроет ключ 33 В тот же момент сигнал с первого вы хода блока управления 10 переведет модель 5 в режим задания начальных условий (отключит ее), а сигнал с четвертого его выходу переведет все предьщущие модели 4,...,3,...,2 1 в режим периодического решения и произведет соответствующие переключе ния последующих коммутирующих устройств. На втором этапе (п-З)-я модель 4 работает аналогично (п-2)й модели 5 на первом этапе. Б результате,после попадания всах координат модели 4 в нуль, блок управления 9 выдаст сигнал, который, проходя через ключ 33 и элемент ИЛИ 15, осуществит третье переключение управления на объекте 17, отключит модель 4, переключит пр дедущее коммутирующее устройство третьей группы аналогично коммутирующему устройству 27, откроет предыдущий ключ, переведет в режим периодического решения предыдущие модели и т.д. Аналогично работают все остальные модели: i-я модель 3 дает ()-e переключение управления объекта 17, ... вторая модель 2 да6716ет (п-З)-е перек.пю-ение, первая модель 1 дает (п-2)-е переключение. Причем по сигналу,, определяющему момент предпоследнего переключения управле-J) ния объекта 17, с выхода блока управления 6, проходящему через ключ 34, открывается ключ 35, а сама модель 1 отключается. В результате все модели отключаются. На третьем этапе, как только координаты объекта ретулирования 1 7 X(t) и ) попадут на линию переключения, реализуемую функциональным преобразователем 36, происходит последнее (n-I)-e переключение управления. Сигнал с функ1Ц1Оиального преобразователя 36, проходя через ключ 35 и элемент ИЛИ 15, перебрасывает триггер 16, переключая управление на объекте 17. После этого движение изображающей точки объекта 17 происходит по линии переключения до точ- ки X,(t) Х,,(С) О.. Таким образом, идея прогнозированного управления заключается в определении моментов первого, второго,.,, ..., (п-2)-го переключения, используя соответственно (п-2)-ю 5, (п-З)-ю 4, ..., первую 1 прогнозирующие модели, причем каждая модель (для того, чтобы свести свои координаты в нуль) использует лредшествую|Щие модели, дающие ей необходимые моменты переключения .Так, д.: системы четвертого порядка (фиг.4) длительность интервале 0-1 определяется моделью четвертого порядка, которая периодически сводит координаты ((V), К,(-,У.{л1 в нуль, определяя момент, когда сравняются заданное значение координаты прогнозированным Xi(-U) . Интервал 1-2 определяется моделью третьего порядка. Интервал 2-3 определяется функциональным преобразователем. На последнем интервале 3- изображающая точка движется по линии переключения до дйстижения объекта управления заданного конечного состояния. Результаты исследований, проведенных на .макете системы четвертого порядка (судно на воздушной подущке, оптимальное упра зление траекторным движением) ., показывают, чтсэ базовая система управления (в случаепрототип) упрощена на два прогнозирующих устройства (5 прогнозирующих моделей и блоков управ гения). В общем случае эко)1омится ri-2 прогнози:.-. 1 109246718 .;: :™:::r ;:::.;;.::--;::;™:- . 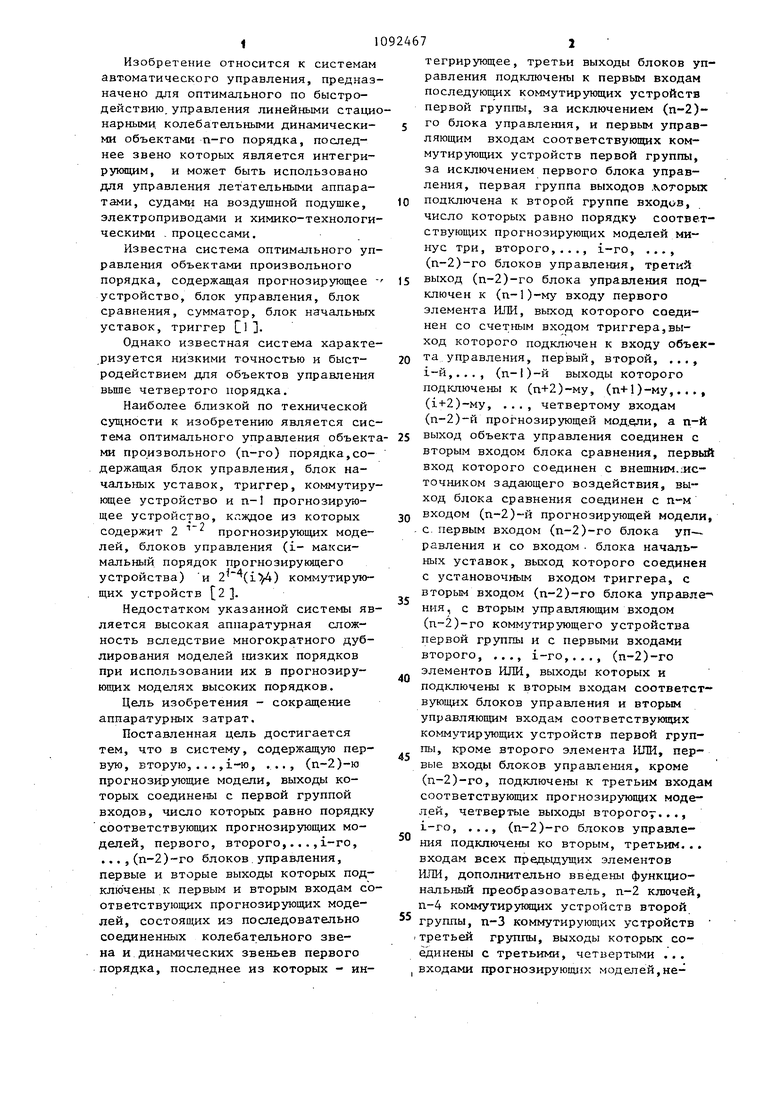

| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для контроля цифровых узлов | 1990 |
|
SU1756894A1 |
| Устройство для сопряжения | 1990 |
|
SU1753478A1 |
| Устройство для моделирования систем связи | 1987 |
|
SU1413641A1 |
| Устройство для программного управления | 1987 |
|
SU1432460A1 |
| Устройство ассоциативного распознавания образов | 1985 |
|
SU1330644A1 |
| Устройство для сопряжения | 1982 |
|
SU1038933A1 |
| Устройство для контроля цифровых узлов | 1987 |
|
SU1571593A1 |
| Система для обмена информацией | 1980 |
|
SU980087A1 |
| Устройство для определения среднего арифметического значения | 1986 |
|
SU1310840A1 |
| Устройство для исследования графов | 1985 |
|
SU1305720A1 |
1.СИСТЕМА ОПТИМАЛЬНОГО УПРАВЛЕНИЯ КОЛЕБАТЕЛЬНЫМИ ОББЕКТА1-М ПРОИЗВОЛЬНОГО ПОРЯДКА,содержащая первую,вт-орую,...,1-ю,. .., (п-2)-ю прогнозирующие мод ели, выходы которых соединены с первой группой входов,число которых равно порядку соответствующих прогнозируюТвдх моделей, первого, второго, ..., i-ro, ..., (п-2)-го блоков управления, первые и вторые выходы которых подключены к первым и вторым входам соответствующих прогнозирующих моделей, третьи выходы блоков управления подключены к первым входам последующих коммутирующих устройств первой группы, за исключением (п-2)-го блока управления, и первым управляющим входам соответствующих коммутирующих устройств первой группы, за исключением первого блока управления, первая группа выходов которых подключена к второй группе входов, число которых равно порядку соответствующих прогнозирующих моделей минус три, BTO-I рого, ..., i-ro, ..., (п-2)-блокОв управления, третий выход (п-2)-го блока управления подключен к (п-1)-му входу первого элемента ИЛИ, выход которого соединен со счетным входом триггера, выход которого подключен к входу объекта управления, первый. (п-1)-й выховторой, 1-й, ды которого подключет.1 к (п+2)-му, (п+1)-му, ..., 
.J
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| ДИНАМИЧЕСКИЙ МАНИПУЛЯТОР | 2019 |
|
RU2721506C1 |
| Кипятильник для воды | 1921 |
|
SU5A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Лернер А.Я., Розенман Б.А | |||
| Оптимальное управление | |||
| М., Энергия, 1970, с | |||
| Приспособление для съемки жилетно-карманным фотографическим аппаратом со штатива | 1921 |
|
SU310A1 |
