Изобретение относится к приборостроению, может быть использовано в качестве исполнительного электромеханического привода и является усовершенствованием изобретения по авт. св. № 842307.
Целью изобретения является повышение надежности за счет снижение трудоемкости изготовления и уменьшение радиальных габаритов.
На фиг. 1 изображено устройство, разрез на фиг. 2 - вид А на фиг. 1.
Устройство состоит из неподвижного основания (корпуса) 1, волновой передачи, содержащей деформируемый элемент 2, представляющий собой гибкое зубчатое колесо, жесткое колесо 3 и генератор волн. Последний образован составными пьезопреобразо- вателями, расположенными симметрично оси волновой передачи враспор между неподвижным основанием 1 и деформируемым элементом 2.
10
15
снижают удельное давление, повышают контактную жесткость стыка и уменьшают контактную деформацию.
Выполнение рычагов двуплечими с углом между плечами 90° уменьшает габариты устройства в радиальном направлении.
Устройство работает следующим образом.
С помощью коммутатора на электроды пьезопреобразователей подаются напряжения, благодаря которым линейные размеры поеобразователей изменяются (обратный пье- зоэффект).
В зависимости от знака разности потенциалов, приложенных к пьезопреобразова- телям, последние испытывают деформацию сжатия или растяжения.
Предположим, что втулка 8 (внутренняя) испытывает деформацию растяжения, втулка 9 (средняя) .- сжатие, а втулка 10 (наружная) - растяжение, тогда свободный коСоставные пьезопреобразователи установ- нец с наконечником 4 получает перемещение
30
35
лены на неподвижном основании 1 равномерно по окружности в радиальных направлениях и взаимодействуют с деформируемым элементом 2 посредством наконечника 4, хомута 5 и подшипника (промежуточного те- 25 ла) 6, установленного на шейке рычага 7.
Составные пьезопреобразователи выполнены в виде втулок 8 - 10 из пьезокерами- ки, торцы которых последовательно жестко соединены при помощи шайб 11 и 12, например клеем ДМ5-65 с добавлением мелкодисперсного порошка из пьезокерамики.
Жесткое колесо 3 установлено посредством выходного вала 13 в подшипниковой опоре 14. Деформируемый элемент 2 установлен в корпусе 1.
На торцевой поверхности корпуса 1 в плоскостях, проходящих через оси волновой передачи и пьезопреобразователей, выполнены отверстия, в которых установлены опоры 15 рычагов 7. Опоры 15 выполнены в виде сферических шарниров, в отверстиях 40 которых установлены рычаги 7. Для модуля 0,3...0,5 мм возможно применение в качестве опоры 15 радиального подшипника.
Рычаги зафиксированы в окружном направлении посредством узла фиксации, вы- д полненного в виде вилок 16, жестко связанных со свободными плечами рычагов и несущих подшипники 17, установленные в овальных пазах 18 неподвижного основания 1. Ширина пазов 18 равна диаметру подшипника 17. Ось пазов расположена в одной плоскости с отверстиями под опоры 15. Пазы 18 расположены с одной из сторон рычага 7.
Опоры для подшипников (промежуточных тел) 6, выполненные в виде хомутов 5,
50
в направлении центральной оси волновой передачи, равное сумме абсолютных линейных деформаций трех втулок 8-10.
При последовательном переключении управляющего напряжения с одной на другую пару диаметрально противоположных пьезопреобразователей и посредством воздействия рычагов 7 на деформируемый элемент (гибкое зубчатое колесо) 2 образуется волновая деформация гибкого колеса, приводящая во вращение жесткое колесо 3.
Формула изобретения
1.Устройство для получения вращательного движения по авт. св. № 842307, отличающееся тем, что, с целью повышения ца- дежности за счет снижения трудоемкости изготовления, в плоскостях, проходящих через оси волновой передачи и пьезопреобразователей, в неподвижном основании выполнены отверстия, опоры выполнены в виде сферических щарниров и установлены в последних, рычаги зафиксированы в окружном направлении посредством узла фиксации, жестко связанного со свободными плечами рычагов, и охвачены промежуточными телами, а ось каждого рычага представляет собой участок последнего.
2.Устройство по п. 1, отличающееся тем, что узел фиксации выполнен в вице вилок, жестко связанных со свободными плечами рычагов и несущих подшипники, установленные в овальных пазах корпуса.
3.Устройство по пп. 1 и 2, отличающееся тем, что промежуточные тела имеют опоры в виде хомутов.
0
5
снижают удельное давление, повышают контактную жесткость стыка и уменьшают контактную деформацию.
Выполнение рычагов двуплечими с углом между плечами 90° уменьшает габариты устройства в радиальном направлении.
Устройство работает следующим образом.
С помощью коммутатора на электроды пьезопреобразователей подаются напряжения, благодаря которым линейные размеры поеобразователей изменяются (обратный пье- зоэффект).
В зависимости от знака разности потенциалов, приложенных к пьезопреобразова- телям, последние испытывают деформацию сжатия или растяжения.
Предположим, что втулка 8 (внутренняя) испытывает деформацию растяжения, втулка 9 (средняя) .- сжатие, а втулка 10 (наружная) - растяжение, тогда свободный ко нец с наконечником 4 получает перемещение
0
5
5
0
0
в направлении центральной оси волновой передачи, равное сумме абсолютных линейных деформаций трех втулок 8-10.
При последовательном переключении управляющего напряжения с одной на другую пару диаметрально противоположных пьезопреобразователей и посредством воздействия рычагов 7 на деформируемый элемент (гибкое зубчатое колесо) 2 образуется волновая деформация гибкого колеса, приводящая во вращение жесткое колесо 3.
Формула изобретения
1.Устройство для получения вращательного движения по авт. св. № 842307, отличающееся тем, что, с целью повышения ца- дежности за счет снижения трудоемкости изготовления, в плоскостях, проходящих через оси волновой передачи и пьезопреобразователей, в неподвижном основании выполнены отверстия, опоры выполнены в виде сферических щарниров и установлены в последних, рычаги зафиксированы в окружном направлении посредством узла фиксации, жестко связанного со свободными плечами рычагов, и охвачены промежуточными телами, а ось каждого рычага представляет собой участок последнего.
2.Устройство по п. 1, отличающееся тем, что узел фиксации выполнен в вице вилок, жестко связанных со свободными плечами рычагов и несущих подшипники, установленные в овальных пазах корпуса.
3.Устройство по пп. 1 и 2, отличающееся тем, что промежуточные тела имеют опоры в виде хомутов.
Вид А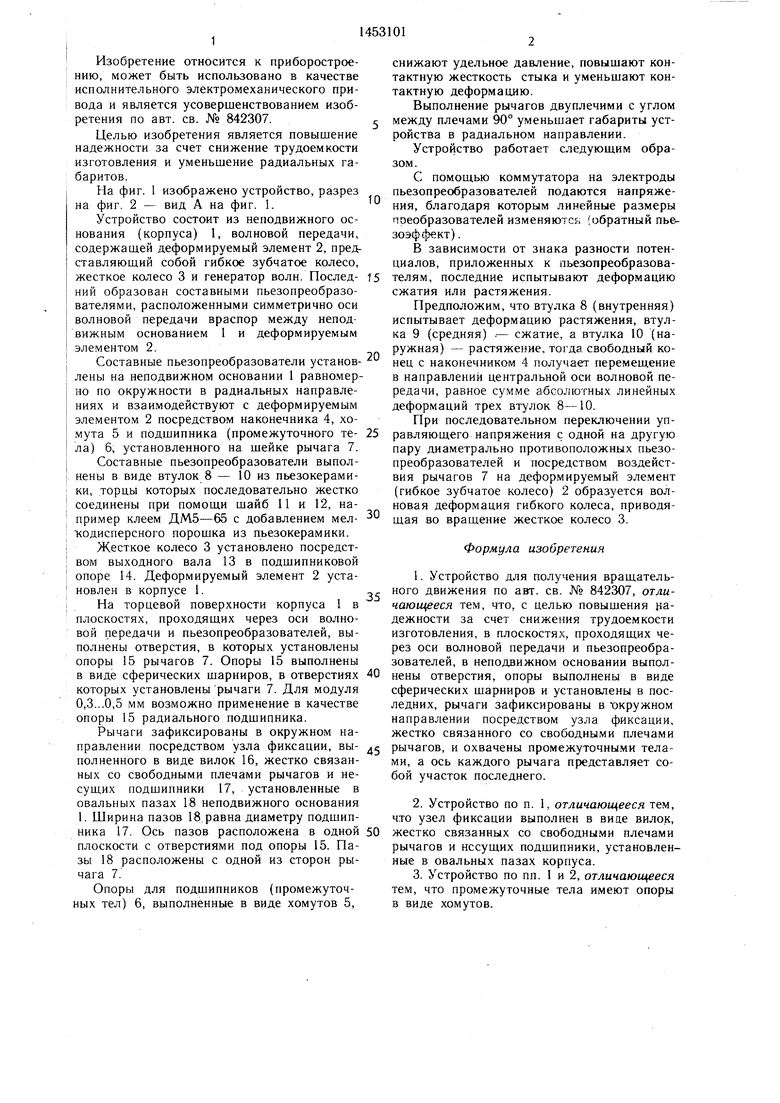
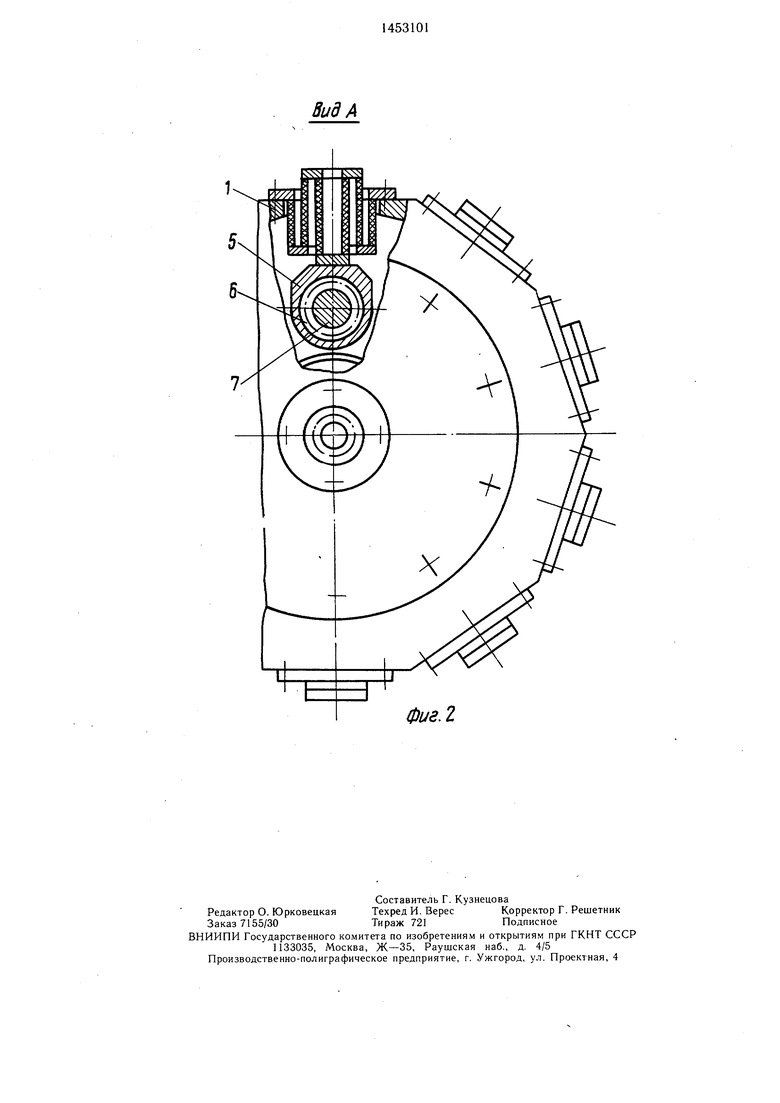
Изобретение относится к приборостроению и может быть использовано в качестве исполнительного электромеханического привода Цель изобретения - повышение надежности путем снижени трудоемкости изготовления и уменьшение радиальных габаритов При последовательном переключении управляющего напряжения с одной на другую пару диаметрально противоположных преобразователей посредством наконечника 4, хомута 5 и промежуточных тел 6 воздействуют рычагами 7 на деформируемый элемент 2. Образуется волновая деформация гибкого колеса, приводяш,ая во вращение жесткое колесо 3. При этом рычаги 7, установленные в опоры 15 в виде сферических шарниров, зафиксированы в окружном направлении посредством узла фиксации, выполненного в виде вилок 16. жестко связанных со свободными плечами рычагов / и несущих подшипники 17, установленные в овальных пазах 18 неподвижного основания 1.2 ил. (Л сд оо к фигЛ
фиг. 2
| Авторское свидетельство f ГмГТтРОИ тво S ПОЛУЧЕНИЯ ВРАЩАТЕЛЬНОГО ДВИЖЕНИЯ |
