СО СП
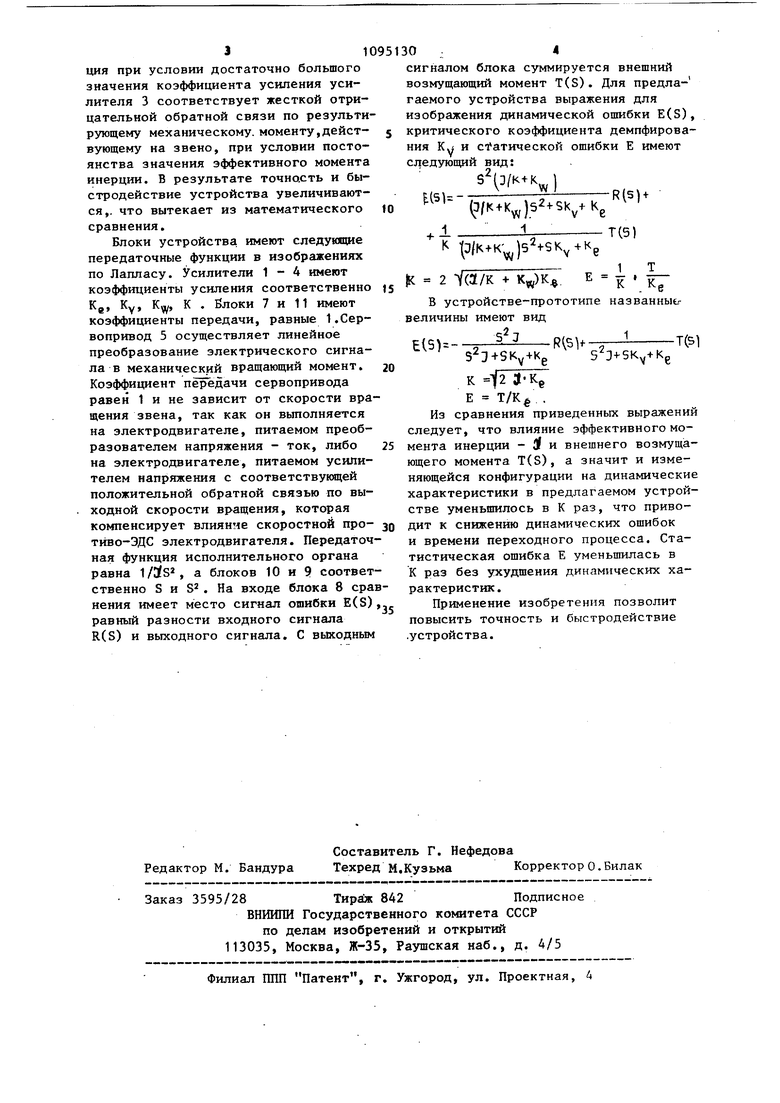
со 110 Изобретение относится к робототехнике и может быть использовано при . создании устройств управления манипулятором. Известны устройства для управления манипулятором, содержащие сумматоры, приводы, датчики положения и вы числительный блок tl Однако данные устройства характеризуются сложностью конструкции. Наиболее близким к изобретению является устройство, содержащее сервопривод, связанный через исполнительный механизм -с датчиком положения, соединенным выходом с первым входом блока сравнения, второй вход которого подключен к входу устройства, а выход - через первый усилитель и через последовательно соединенные блок дифференцирования и второй усилитель к первому и второму входам суммато|ра С23. Известное устройство характеризуется значительной динамической ошибкой позиционирования, которая зависит от эффективного момента инерции и внешне ГО возмущакядего момента. Для большин ства манипуляторов значение эффектив ного момента инерции может меняться на порядок при изменении конфигурации, что приводит к значительным динамическим ошибкам и низкому быстродействию устройства, обусловленному длительным переходным процессом. Целью изобретения является повьш1е ние точности и быстродействия устрой ства. Поставленная цель достигается тем что в устройство, содержащее сервопривод, связанный через исполнительный механизм с датчиком положения, соединенным выходом с первым входом блока сравнения, второй вход которого подключен к входу устройства, а выход - через первьй усилитель и через последовательно соединенные блок дифференцирования и второй усилитель к первому и второму входам сумматора соответственно, дополнительно введены третий усилитель и последовательн соединенные блок двойно1о дифференцирования и четвертый усилитель, выход которого подключен к третьему вхрду сумматора, coeди гGннoгo выходо через третий усилитель с входом сервопривода, а выход датчика положения подключег к входу блокл .пвоГгного диф ференцироватшя. 0 На чертеже представлена функциональная схема устройства. Устройство содержит первый,второй, третий и четвертый усилители 1,2,3 и 4 соответственно, сервопривод 5, исполнительный механизм 6, датчик 7 положения, блок 8 сравнения, блок 9 двойного дифференцирования, блок 10 дифференцирования, сумматор 11. Устройство работает следующим образом. На выходе блока 8 сравнения формируется сигнал ошибки положения, равный разности входного сигнала и текущего сигнала положения, поступающего с датчика положения, сигнал ошибки по скорости находится в результате дифференцирования сигнала ошибки положения блоком 10. Полученные сигналы усиливаются усилителями 1 и 2, суммируются сумматором 11 и после усиления усилителя 3 поступают на вход сервопривода 5. Сервопривод 5 вращает звено механизма 6 шарнирного манипулятора, с которым механически связан датчик 7. В этой части устройства реализуется преобразование входного сигнала и его скоростной составляющей в управляющий механический момент, приводящий во вращательное движение звено манипулятора, и за счет .сигналов отрицательной обратной связи по положению и скорости звена,устанавливающий звено в положение, соответствующее значению входного сигнала. Однако с управляющим механическим моментом, действующим на звено, суммируется внешний изменяющийся возмущающий механический момент от действия сил тяжести данного и последующего звеньев манипулятора. Кроме того, эффективный момент инерции звена также существенно меняется при изменении текущей конфигурации звена. Для снижения влияния указанных факторов на пррцесс движения и удержания в заданном положении звена манипулятора сигнал датчика дифференцируется и выходной сигнал блока 9 является мерой результирующего механического момента, действующего на исполнительный механизм. Этот сигнал после усиления усилителем сравнивается в блоке 11 с обусловленными входным сигналом электрическими сигналами, формирующими собственно управляющий механический момент, а результат сравнения после усиления усилителем 3 поступает на вход сервопривода 5. Такая коррек i1 ция при условии достаточно большого значения коэффициента усиления усилителя 3 соответствует жесткой отрицательной обратной связи по результи рующему механическому, моменту,деиствующему на звено, при условии постоянства значения эффективного момента инерции. В результате точность и быстродействие устройства увеличиваются,, что вытекает из математического сравнения. Блоки устройства имеют следуюпще передаточные функции в изображениях по Лапласу. Усилители 1-4 имеют коэффициенты усиления соответственно Kg, Ку, К, К . блоки 7 и 11 имеют коэффициенты передачи, равные 1.Сервопривод 5 осуществляет линейное преобразование электрического сигнала в механический вращающий момент. Коэффициент передачи сервопривода равен 1 и не зависит от скорости вра щения звена, так как он выполняется на электродвигателе, питаемом преобразователем напряжения - ток, либо на электродвигателе, питаемом усилителем напряжения с соответствующей положительной обратной связью по выходной скорости вращения, которая компенсирует влияние скоростной противо-ЭДС электродвигателя. Передаточ ная функция исполнительного органа равна , а блоков 10 и 9 соответ ственно S и S2. На входе блока 8 срав нения имеет место сигнал ошибки E(S) равный разности входного сигнала R(S) и выходного сигнала. С выходным 30 .4 сигналом блока суммируется внешний возмущающий момент T(S). Для предлагаемого устройства выражения для изображения динамической ощибки E(S), критического коэффициента демпфирования К и статической ошибки Е имеют с;1едующий вид: ) U5)-,.... ,,,.L. .. R(5)t ()52+sk f Kg - ) IK 2 -yci/K + КэдЖ K в устройстве-прототипе названныевеличины имеют вид Е(5)К 1(2 a-Kg Е Т/К . Из сравнения приведенных выражений следует, что влияние эффективного момента инерции -Ли внешнего возмущающего момента T(S), а значит и изменяющейся конфигурации на динамические характеристики в предлагаемом устройстве уменьшилось в К раз, что приводит к снижению динамических ошибок и времени переходного процесса. Статистическая ошибка Е уменьшилась в К раз без ухудшения динамических характеристик. Применение изобретения позволит повысить точность и быстродействие устройства.
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО УПРАВЛЕНИЯ МАНИПУЛЯТОРОМ РОБОТА | 2002 |
|
RU2230349C2 |
| Устройство управления манипулятором робота | 2018 |
|
RU2701459C1 |
| Устройство для управления приводом манипулятора | 1989 |
|
SU1673433A1 |
| УСТРОЙСТВО ДЛЯ УПРАВЛЕНИЯ ПРИВОДОМ РОБОТА | 2004 |
|
RU2258600C1 |
| Устройство для управления приводом робота | 1985 |
|
SU1405023A1 |
| Устройство для управления манипулятором | 1981 |
|
SU991367A1 |
| Пропорционально-интегрально-дифференциальный регулятор для объектов с запаздыванием | 1988 |
|
SU1596304A1 |
| Устройство для управления приводом робота | 1981 |
|
SU996990A2 |
| УСТРОЙСТВО ДЛЯ УПРАВЛЕНИЯ ПРИВОДОМ РОБОТА | 2002 |
|
RU2212329C1 |
| Электрогидравлический следящий привод | 1986 |
|
SU1399521A2 |
УСТРОЙСТВО ДЛЯ УПРАВЛЕНИЯ МАНИПУЛЯТОРОМ,содержащее серво- привод, связанный через исполнительный механизм с датчиком положения, соединенным выходом с первым входом блока сравнения, второй вход которого подключен к входу устройства, а выход - через первый усилитель и через последовательно соединенные блок дифференцирования и второй усилитель к первому и второму входам сумматора соответственно, отличающееся тем, что, с целью повышения точности и быстродействия устройства, оно содержит третий усилитель и последовательно соединённые блоки двойного дифференцирования и четвертый усилитель, выход которого подключен к третьему входу сумматора, соединенного выходом через тре§ тий усилитель с входом сервопривода, а выход датчика положения подключен СП к входу блока двойного дифференцирования.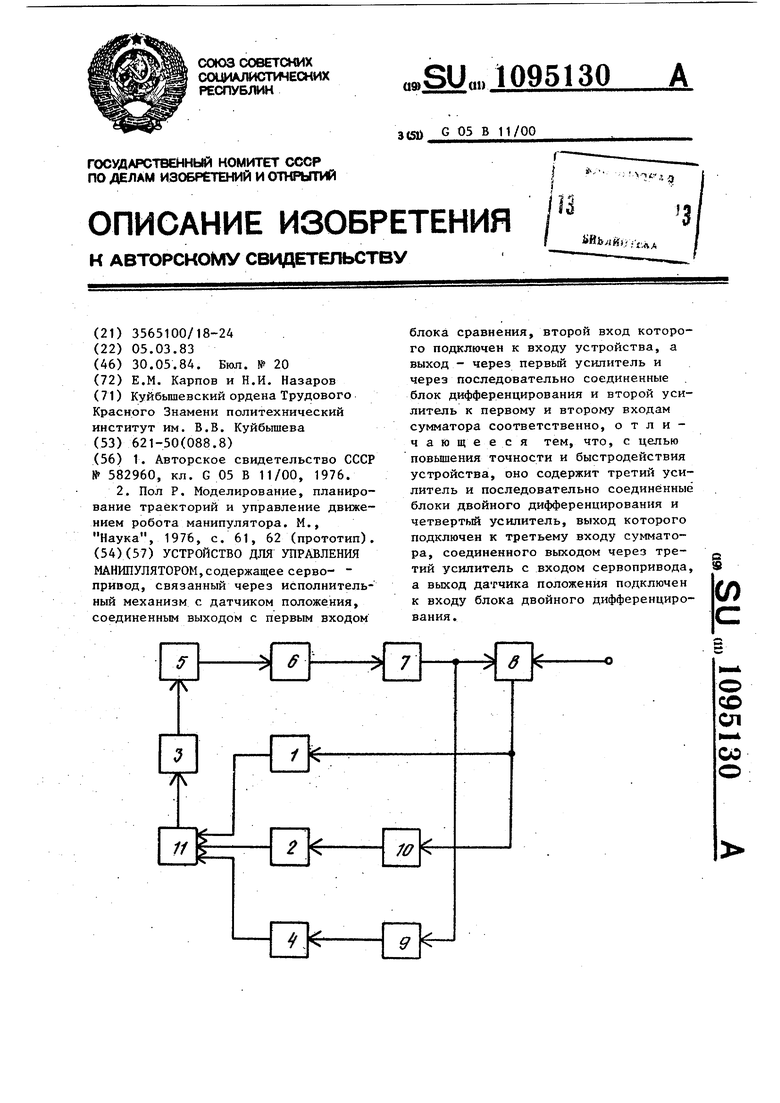
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Устройство для управления дистанционным манипулятором | 1976 |
|
SU582960A1 |
| Кипятильник для воды | 1921 |
|
SU5A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Пол Р | |||
| Моделирование, планирование траекторий и управление движением робота манипулятора | |||
| М., Наука, 1976, с | |||
| Устройство для сортировки каменного угля | 1921 |
|
SU61A1 |
