(54) УСТРОЙСТВО ДЛЯ УПРАВЛЕНИЯ МАНИПУЛЯТОРОМ
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для позиционно-скоростного управления манипулятором | 1981 |
|
SU991366A1 |
| Устройство для управления промышленным роботом | 1986 |
|
SU1349998A1 |
| Адаптивная система управления | 1985 |
|
SU1361502A1 |
| Устройство для управления промышленным роботом | 1984 |
|
SU1170428A1 |
| Адаптивная система управления | 1984 |
|
SU1257607A1 |
| ЭЛЕКТРОПРИВОД МАНИПУЛЯТОРА | 2010 |
|
RU2443542C1 |
| Устройство для контроля динамической системы управления | 1979 |
|
SU875345A1 |
| УСТРОЙСТВО ДЛЯ УПРАВЛЕНИЯ ПРИВОДОМ РОБОТА | 2006 |
|
RU2325268C1 |
| УСТРОЙСТВО ДЛЯ УПРАВЛЕНИЯ ПРИВОДОМ РОБОТА | 2006 |
|
RU2311284C1 |
| УСТРОЙСТВО ДЛЯ УПРАВЛЕНИЯ ПРИВОДОМ РОБОТА | 2003 |
|
RU2228257C1 |
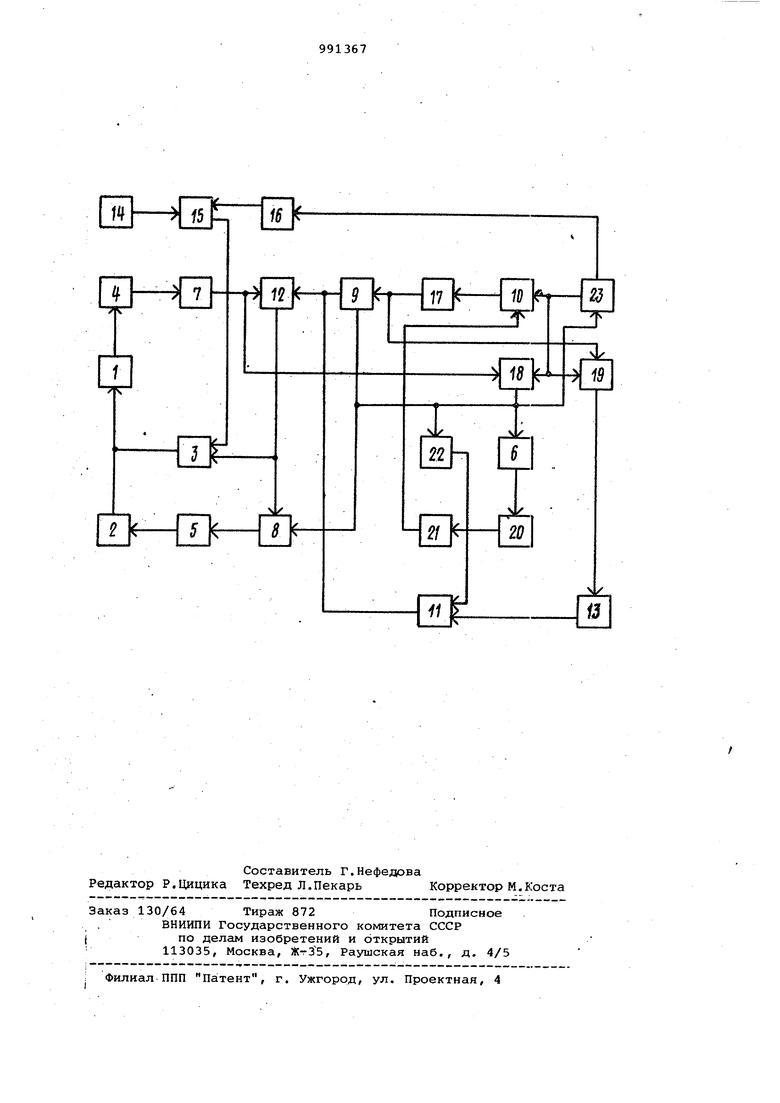
Изобретение относится к робото;технике и может быть использовано при создании устройств для управления малоскоростными уравновешенными манипуляторами. Известно устройство для управления манипулятором, содержащее задатчик, сумматор, блок коррекции, усилитель, привод, исполнительный механизм и датчик положения 1. Однако устройство не решает задачи управления объектами с переменным моментом инерции. ,Наиболее близким техническим решением к изобретению является устрой ство, содержащее последовательно сое диненные первый.дифференциатор, первый усилитель и привод, связанный че рез исполнительный механизм с датчиком положения, выход которого через последовательно подключенные первый сумматор и второй усилитель соединен с входом привода С 2. Недостатком известного устройства является сложность, обусловленная сложностью вычислительной машины, .входящей в его состав. Кроме того., в про цессе отработки входного сигнала имеют место непрерывные переходные процессы, на подавление которых тратится дополнительное время, снижающее быстродействие. , Целью изобретения является упрощение и повышение быстродействия устройства. Поставленная цель достигается тем, что устройство содержит источник опорного сигнала, первый и второй ключи и последовательно соединенные пульт управления, третий ключ, блок памяти, второй сумматор, третий усилитель и четвертый ключ, последовательно подключенные элемент И, второй дифференциатор, однополупериодный выпрямитель и ждущий мультивибратор, а так же последовательно соединенные квадратор и блок деления, второй вход которого подключен к выходу источника опорного сигнала, а выход к второму входу второго усилителя, первый вход элемента И соединен с выходом датчика положения, второй вход - с первым выходом пульта управления и вторым входом второго сумматора, а выход - с ВХОДОМпульта управления и элемента НЕ, с первым входом первого ключа и второго клрча, вторым входом подключенного к выходу блока памяти, а выходом - к выходу четвертого ключа и к второму входу первого сумматора, выход которого соединен с вторьм входом первого клю ча, выходом подключенного к входу первого дифференциатора, выход элемента НЕ соединен с вторым входом четвертого ключа, выход ждущего муль тивибратора подключен к второму вход третьего ключа, а второй выход пульга управления соединен с входом квад ратора. На чертеже представлена функциональная схема устройства. Схема содержит привод 1, первый и второй усилители 2 и 3 соответственно, исполнительный механизм 4, первый 5 и второй 6 дифференциаторы датчик 7 положения, первый 8, второй 9, третий 10 и четвертый 11 ключи первый сумматор 12, третий усилитель 13, источник 14 опорного сигнала, блок 15 деления, квадратор 16, блок 17 памяти, элемент И 18, второй Сумматор 19, однополуперйодный выпря митель 20, ждущий мультивибратор 21 элемент НЕ 22, пульт 23 управления. Устройство работает сдедующим образом. Для перевода исполнительного орга йа манипулятора из текущего положения L в целевое LQ за время вычислительная машина должна по введенныг. указанным; параметрам выработать входной управляющий сигнал R(t вида R(t)u,.li4-4))«- Действующий на входе привода 1 электрический сигнал преобразуется в механический вращающий момент М, приводящий звено исполни ельного ме.ханизма 4 малоскоростного уравновешенного шарнирного манипулятора,.во вращательное движение, которое описы вается линейным дифференциальным уравненлем ,С2) где 3 - приведенный момент инерции звена манипулятора, В начале на первом выходе пульта 23 управления действует задающий входной сигнал R{t) L, Звено манипулятора при этом повернуто на такой угол, что соответствующий ему выходной сигнал S(t) Ц . Эти два равных сигнала поступают на входы элемента И 18, на выходе которого при этом имеет место сигнал совпадения , .под действием ключи 8 и 9 открыты, а ключи 10 и 11 закры ты. При этом В схеме реализуется отрицательная обратная связь по ошибке положения и демпфирование по ошибке скорости. На второй вход первого сумматора 12 через открытый ключ 9 поступает с блока 17 памяти запомненный ранее входной сигнал R(t) L. При этом звено неподвижно и удерживается в положении .L,. , Сигнал совпадения с выхода элемента И 18 поступает также на вход пульта 23, индицируя равенство текущего положения звена положению, задаваемому с пульта 23 управления, и давая тем самым разрешение на задание следующего целевого положения. При задании нового целевого входного сигнала L, с первого выхода пульта 23 управления этот сигнал поступает на первый вход элемента И 1В, на втором входе которого продолжает действовать сигнал L, На выходе элемента И 18 сигнал совпадения сменяется на сигнал несовпадения, в результате чего под действием его ключи В и 9 закрываются, а ключ 11 открывается. Сигнал l. с пульта 23 управления и сигнал ц с блока 17 памяти суммируются з сумматоре 19 и усиливаются масштабирующим усилителем 13 с коэффициентом усиления,равным 0,5, после чего на втором входе первого сумматора 12 сигналравен . Сигнал же L с блока 17 памяти на вход сумматора 12 не поступает,так как ключ 9 закрыт. Закрытие ключа 8 переводит работу схег-пл в целом в автоколебательный режим. Движение звена при такой структуре схемы управления описывается на основе (2) линейным дифференциальным уравнением (i) eRCij. (ъ) Изображение по Лапласу решения уравнения (3) с учетом ненулевого начального положения L,, имеет вид Преобразованное по таблице обратных преобразований Лапласа выражение (4) принимает вид .н,) fi а -ю6 cos ij---Ь ( 0(t)+Y (U2-mh J(-|) e-ifiВыражение (5) полностью совпадает с выражением (1), т.е. устройство по редством перестроения структуры сервосистемы автоматически перемещает за указанное время Т по оптималь ной траектории (1) плавно, без рывка и удара, звено з заданное целевое положение Lj, причем предварительного расчета согласно имеющимся величи нам L/), Lj и генерирования сложно го (1 ) входного сигнала не требуется Время ir достижения целевого положения задается в устройстве одновре менно с заданием положения Lg посред ством установки соответствующего ко эффициента усиления усилителя 3. Как следует из (6) коэффициент усиления К, соответствующий времени Т , равенСигнал заданного времени i поступает с второго выхода пульта 23 управления на вход квадратора 16,с вы хода которого сигнал значением Т поступает на первый вход блока 15 деле ния, на второй вход которого с ис-точника 14 опорного сигнала поступает сигнал, значение которого равно . Выходной сигнал блока 15 деле,ния, равный (7), поступает на управ ляющий.вход усилителя 3, в результате чего коэффициент усиления усилителя 3 становится равным (7), обеспе чивая тем самым достижение исполнительным механизмом целевого положения L, за заданное время т . В мо мент достижения .заданного положения L f сигнал на втором входе элемента И 18 станет равным L-j и будет равен сигналу L 2 на первом входе эле мента И 18, поступающему с первого выхода пульта 23 управления. На выхо де элемента И 18 появится сигнал сов падения, который дифференцируется дифференциатором б и выпрямляется однополупериодным выпрямителем 20, что позволяет сформировать из переднего фронта сигнала совпадения управляющий импульс. Этот ийпульс запускает ждущий мультивибратор 21, выходной сигнал которого на короткое время открывает ключ 10, и в бло ке 17 памяти записывается заданный сигнал Lg.Одновременно сигнал совпадения поступает на вход пульта 23 управления, индицируя достижение зве ном заданного положения, а также открывает ключи 8 и 9 и через элемент НЕ 22 закрывает ключ 11. Тем са мым в устройство вновь вводится демп фирование по ошибке скорости, а на втором входе сумматора 12 действует заданный сигнал 12- Звено манипулятора в результате этого удерживается в достигнутом целевом положении L2. . Применение изобретения позволит упростить устройство за счет исключения из его состава сложной цифровой вычислительной машины. Одновременно повышается быстродействие устройства, так как при достижении целевого по- ложения по оптимальной траектории не тратится время, как ранее, на подавление переходных процессов, а для движения по оптимальной траектории непосредственно используется сам пeper ходный процесс определенного вида,сформированный посредством соответствукадих перестроений структуры устройства. Формула изобретения Устройство для управления манипу-: лятором, содержащее последовательно соединенные первый дифференциатор, первый усилитель и привод, связанный через испох |}ительный механизм с датчиком положения, выход которого через последовательно подключенные первый сумматор и второй усилитель соединен с входом привода, отличающееся тем, что, с целью упрощения и повышения быстродействия устройства, оно содержит источник опорного сигнала, первый и второй ключи и последовательно соединенные пульт управления, третий ключ,,блок памяти, второй сумматор, третий, усилитель и четвертый ключ, последовательно подключенные элемент И, второй дифференциатор, однополупериодный выпрямитель и ждущий мультивибратор, а также последовательно соединенные квадратор и блок деления, второй вход которого подключен к выходу источника опорного сигнала, а выход - к второму входу второго уСилитёля, первый вход элемента И соединен с выходом датчика положения, второй вход - с первым выходом пульта управления и вторым входом второго сумматора, а выход - с входдм пульта управления и элемента НЕ, с первым Входом Первого ключа и второго ключа, вторым входом подключенного к выходу блока памяти, а выходом - к выходу четвертого ключа и к второму входу первого сумматора, выход которого соединен с вторым входом первого клйча, выходом подключенного к входу первого дифференциатора, выход элемента НЕ соединен ,с вторым входом четвертого ключа, выход ждущего мультивибратора подключе.н к второму входу третьего ключа, а второй выход пульта управления соединен с входом квадратора. Источники информации, принятые во внимание при экспертизе 1.Техническая кибернетика. Под ред. В.В. Солодовникова. М., Машиностроение, 1967, с. 54. 2.Пол Р. Моделирование, планирование траекторий и управление движением робот а- манипулятора. М., Наука, 1976, с, 62 (прототип).
