Изобретение относится к устройствам автоматического регулирования динамическими г объектами с запаздыванием и может быть использовано при создании высокоточных систем управления металлорежущими станка.ми. Цель изобретения повышение качества димнамических характеристик регулятора. На чертеже представлена функциональная схема регулятора. Регулятор содержит активный фильтр ., первый 2 и второй 3 .блоки дифференцирования, первый 4 и второй 5 делители напряжения, первый 6, второй 7, третий 8 и четвертый 9 сум маторы, первый 10, второй П, третий 12 и четвертый 13 усилители, первый 14 и второй 15 выпрямители, нелиней- ный элемент 16 с насыщением, инерционное звено 17 и исполнительный механизм 18, причем второй 11 и чет вертый 13 усилители выполнены с пере менным коэффициентом усиления,. Регулятор работает следующим образом. Входной-сигнал поступает на первый вход сумматора 9 и информационный вход активного фильтра 1. На управляющий вход активного фильтра 1 поступает сигнал с выхода второго делителя 5 напряжения, устанавливая перестраиваемую полосу пропускания фильтра в функций времени запаздыва- ния объекта. С выхода активного филь ра 1 сигнал поступает на вход второг блока ди4)ференцирования 3, с .выхода которого поступает на информационный вход усилителя 13, на управляющий вход которого поступает сигнал с выхода второго делителя 5. Вследствие этого в четвертом усилителе 13 уста навливается коэффициент усиления, пр мо пропорциональный времени запаздьго ния. С выхода усилителя 13 сигнал поступает на второй входсумматора на выходе которого формируется сигна У X -сХ, где X входной сигнал; X - производная входного сигнал С - постоянная времени запаздыв ния, С выхода четвертого сумматора 9 сигнал поступает на входы усилителя 10, первого блока 2 дифференцирован и первого выпрямителя 14. С выходов усилителя 10 и блока 2 дифференциро вания сигналы поступают на входы пе вого сумматора 6 соответственно, с выхода которого сигнал поступает на информационный вход усилителя Г1 . С выхода выпрямителя 14 сигнал поступает на первый вход второго сумматора 7, на второй вход которого поступает сигнал с выхода делителя напряжения. С выхода сумматора 7 сигнал поступает через второй выпрямитель 15 на вход нелинейного элемента 16 с насыщением, с вькода которого - на управляющий вход второго усилителя 11. Выход усилителя 11 соединен с первым входом третьего сумматора 8, выход которого подключен к входу усилителя 12, выход которого через инерционное звено 17 соединен с вторым входом сумматора 8. Выход третьего усилителя 12 соединен также с входом исполнительного механизма 18. При первоначальном подключении регулятора к объекту через элементы 14, 4, 7, 15, 16 у второго усилителя 1 устанавливается малый коэффициент усиления, что способствует плавному разгону объекта регулирования вдоль границы области ограничений по управляемой координате и постепенному переходу его в режим стабилизации. По мере уменьшения входного сигнала Х коэффициент усиления усилителя 11 увеличивается, а в режиме стабилизащш при определенных ошибках с помощью нелинейного элемента 16 с насыщением он устанавливается оптимальным для данного режима стабилизации. Как известно, усилители с переменным коэффициентом усиления увеличивают коэффициент усиления прямо пропорционально сигналу на управляющем входе, в то же время практика систем автоматического регулирования свидетельствует , о том, -что для плавного разгона необходимо менять коэффициент усиления от меньшего к большему. Поскольку ощибка регулирования при разгоне по координате X изменяется от максимального значения к минимальному, то с помощью элементов 14, 4, 1; 15, 16 реализуется обратно пропорциональная зависимость от ошибки регулирования. Начальный коэффициент усиления управляемого усилителя можно установить достаточно малым, в 40-80 раз меньше коэффициента усиления в режиме стабилизации, а вдальнейшем в регуляторе автоматически будет выбираться необходимый коэффициент для прохождения допустимой области по ограничению. Обозначим через У (Р ) передаточную функцию элемента регулятора. Передаточные функции элементов, исполь зуемые ниже, имеют следующий вид: W, (Р) з(Р) V; W,,(P ) Kj; W,o(P ) Kg; Wg (Р) Иц(Р) К,4(Х) ; W,;(P ) K,g; У„(Р ) БГ. W ГР -) --- Й Обозначим выходные сигналы активного фильтра 1 через Хр второго бло ка 3 дифференцирования - Х, четвер+ X,; X -ь Х7; V . у I Y I 6 Л, ,Л, Л,д|, Известно что передаточная функция пропорционально-интегрально-дифференциального регулятора имеет вид: Wp(P ) Kp(X).(l+Tgp+ ji-)(2) ,(s)Kp(x)i-i-M-p.(3 где Кр(Х) - коэффициент усиления, Р - оператор Лапласа; Т,. - постоянная времени интегирирования; постоянная времени дифференцирования. Передаточную функцию регулятора можно определить так: Wp(P) wH / )w,j(P) 1 .pj + l((PJWi(P) JbW TpTVPT XW(P).(4) Подставляя выражения передаточных функций элементов, получаем: Wp(p) |{|} (--Ьт ) x(Kg + ) к,(х) тр f,;p+T .р) . Ш1 (. 1), Р Х(Р)- +1 K,KiiiK6 + к РЫЬгШ) К,)ТцР J Хы + (6) 46 того усилителя 13 - X второго делителя 5 напряжения - Х,, четвертого . сумматора 9 - Х, первого усилителя 10 - Xg, первого блока 2 дифференцирования - Х, первого выпрямителя 14 - Хд, первого сумматора 6 - Хо, второго сумматора 7 - Х, первого делителя 4 напряжения - Х,, второго выпрямителя 15 - Х. нелинейного элемента 16 с насыщением второго усилителя 11 - , третьего сумматора 8 - Хц, третьего усилителя 12 gt инерционного звена 17 X , исполнительного механизма 18 тогда уравнения связи сигналов регулятора будут иметь вид; X Третий усилитель 12 выбирается с остаточно большим коэффициентом усиения, чтобы выполнялось соотноше ие П V Кроме того, четвертый усилитель 13 беспечивает выполнение соотношения: К. К l, (8) Отсюда получаем: Wp(P) (.- 1) Т,Р +1 ,6+ К7Р2 )Т,1.Р + 121 JiEl. (-± + ,) Kj4 Ч, Р+1 Ki7 CK.. ---. Обозначим через Y(P) следующее вы- вение: Y(P)X(P) +1). (11) + 1 Тогда передаточная функция регуляа по поординате Y имеет вид v л оп Г, ,7.1Кгр Ш1 Кн ,. К-- ч Y(P) L Kg 1 ,TILP: -I ,(,2) Кб Из сравнения выражений (3) и (12) учаем . .;T..K, 1 «Гf K.g Т,Т t Таким образом, К.-(X) не вносит изменения в значение остальных параметров регулятора, причем по отноше нию к расчетной координате Y пропорционально-интегрально- дифференциаль ный закон реализуется. Вследствие введения в структуру регулятора активного фильтра 1, блок 3 дифференцирования, делителя 5 напр жения, усилителя 13 с переменным- на пряжением усиления достигается возможность обеспечить сокращение дли тельности переходного процесса за сч введения упреждения по управлению. Использование активного фильтра позволяет получить усредненное значе ние производной по ошибке и ограничить влияние случайных возмущающих воздействий и шумов измерения, что повышает степень приближения расчетной ошибки регулирования к фактической. Монотонность и небольшие градиенты ошибки регулирования вследствие апериодического характера переход- ного процесса обеспечивают достаточ ную точность аппроксимации расчетной ошибки по сравнению с действительной и сокращение длительности переходных процессов. зобретения Формула Пропорционально-интегрально-дифференциальньш регулятор для объектов с запаздьюанием, содержащий первый усилитель и первый блок дифференцирования, выходы которых подключены к соответствующим входам первого сумматора, первый выпрямитель и первый делитель напряжения, выходы которых подключены к входам второго сумматрра, выход которох о через последовательно соединенные второй выпрямитель и нелинейный элемент типа насьш.ение подключен к входу настройки коэффициента усиления второго усилителя, выход которого соединен с первым входом третьего сумматора, выход которого через третий усилитель соединен с входами инерционного звена и исполнительного механизма, выход первого сумматора соединен с информационным входом второго усилителя, а выход инерционного звена соединен с вторым входом третьего сумматора, отличающий с я тем, что, с целью повышения качества переходных процессов регулятора, в него введены четвертый сумматор, активный фильтр, второй блок дифференцирования, четвертый усилитель, четвертый сумматор и второй делитель напряжения, выход, которого подключен:, к входу настройки коэффициента усиления активного фильт-° ра и четвертого уснлителя, вход регулятора соединен с информационным входом активного фильтра и с первым входом четвертого сумматора, выход активного фильтра через второй блок дифференцирования соединен с информационным входом четвертого усилителя, выход которого, подключен к второму входу четвертого сумматора, выход которого соединен с входами первого усилителя, первого-,блока дифференцирования и первого выпрямителя.

| название | год | авторы | номер документа |
|---|---|---|---|
| Многофункциональный регулятор | 1986 |
|
SU1432455A1 |
| Пропорционально-интегрально-дифференциалный регулятор | 1986 |
|
SU1388824A2 |
| Адаптивная система управления | 1986 |
|
SU1399700A1 |
| Самонастраивающаяся система комбинированного регулирования | 1986 |
|
SU1339494A1 |
| САМОНАСТРАИВАЮЩИЙСЯ ЭЛЕКТРОПРИВОД | 1994 |
|
RU2060530C1 |
| Адаптивный регулятор | 1977 |
|
SU746414A1 |
| Импульсный регулятор перемещения пъезодвигателя | 1983 |
|
SU1133582A2 |
| Вентильный электродвигатель | 1989 |
|
SU1767638A1 |
| Самонастраивающаяся система автоматического управления для объектов с запаздыванием | 1981 |
|
SU1173390A1 |
| Самонастраивающийся электропривод робота | 1990 |
|
SU1773714A1 |
Изобретение относится к устройствам автоматического регулирования режимов работы динамических объектов с запаздыванием и может быть использовано при создании высокоточных систем управления металлорежущими станками. Изобретение позволяет за счет реализации упреждения по управлению сократить длительность переходного процесса, а также обеспечить апериодический характер переходного процесса. Регулятор содержит активный фильтр 1, два блока дифференцирования 2, 3, два делителя напряжения 4, 5, четыре сумматора 6-9, четыре усилителя 10-13, два выпрямителя 14, 15, нелинейный элемент с насыщением 16, инерционное звено 17 и исполнительный механизм 18. 1 ил.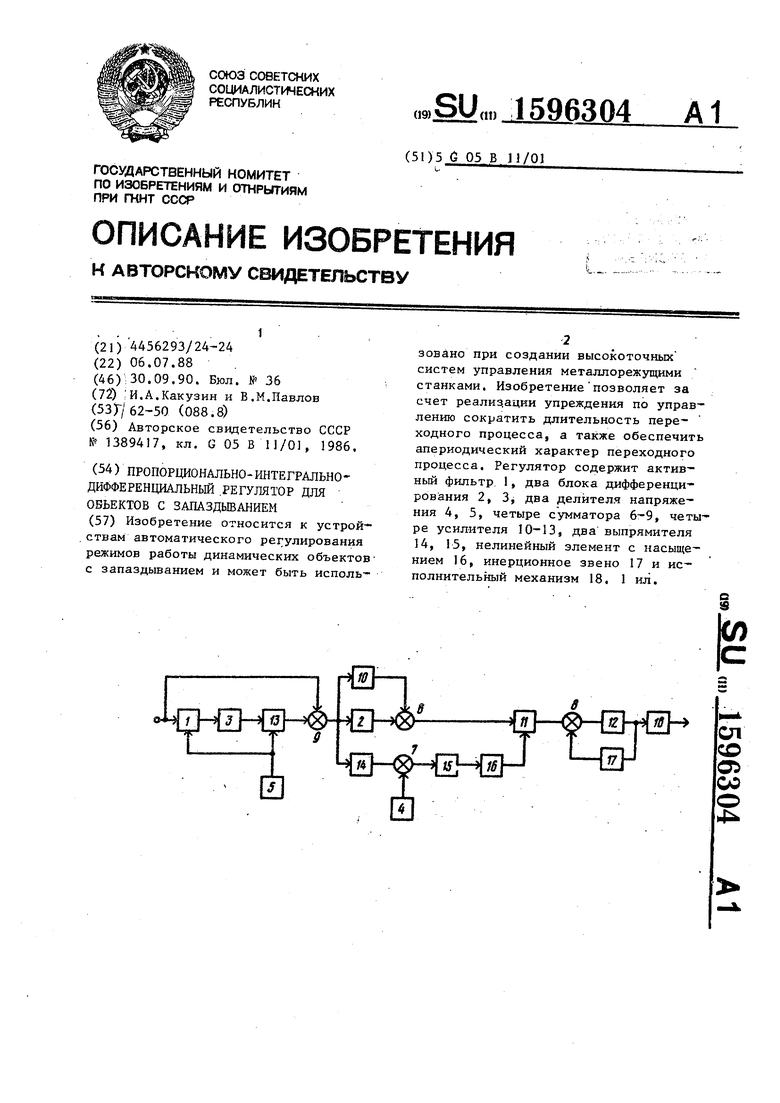
| Авторское свидетельство СССР N* 1389417, кл | |||
| Кипятильник для воды | 1921 |
|
SU5A1 |
