Изобретение относится к автоматике и может быть использовано при создании систем управления дистанционными манипуляторами.
Известно устройство для управления дистанционными манипуляторами, содержащее датчик угла задающего органа, сумматор, усилитель и привод 1.
Однако оно не может быть использовано для выполнения рабочих операций с обт ектами, на которые наложены внешние связи.
Наиболее близлим по телнйческой гути к изобретению является .устройство, содержащее последовательно соединенные электропривод, упругий элемент и датчик-момента, датчак угла задающего органа, последовательно соединенные первый сумматор, усилитель, злектрогидроусилитель, гидропривод и датчик давления, выход которого подключен ко входу nejiBoro сумматора {2.
Однако это устройство имеет низкую производительность при выполнении рабочих операций объектами, имеющими внешние связи, так как при несовпадении траектории, задаваемой оператором, с траекторией, обусловленной связями обьекта, в суставах исполнительного органа возникают моменты сопротивления, в результате действия которых может произойти либо заклинивание механизма (есл.и жесткость
выше жесткости исполнительного органа), либо поломка объекта (если жесткость его меньню, чем жесткость иснолнительного органа)
Целью изобретения является расширение области применения манипулятора.
Для этого в устройство включает последовательно соединенные датчик угла исполнительного органа и второй сумматор, выход которого через последовательно соединенные электропривод и датчик угла задающего органа нодключен ко второму входу второго сумматора, второй выход гидропривода соединен со входом датчика угла исполнительного органа, а выход датчика момента подключен ко второму входу первого сумматора.
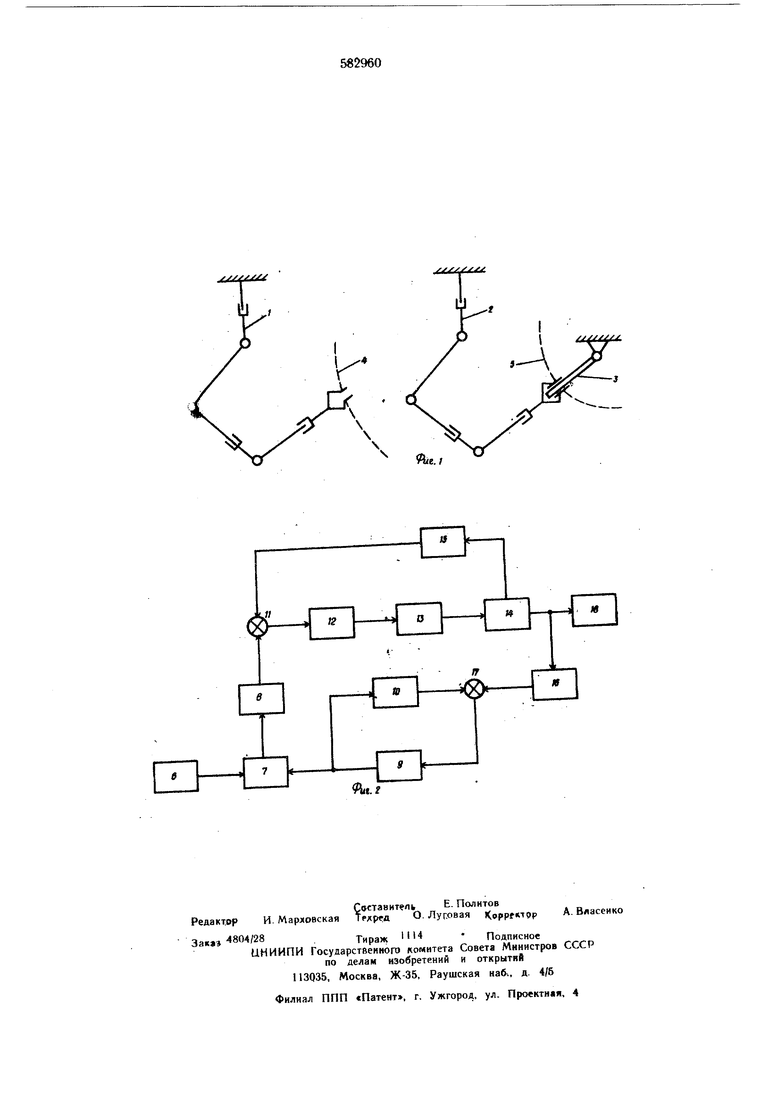
На фиг. 1 представлены кинематические схемы задающего 1 и исполнительного 2 органов, объект 3, траектория 4 задающего органа и траектория 5 объекта, обусловленная его связями; на фиг. 2 изображена структурная схема
У тройства для управления дистанционным манипулятором, которая включает блок 6 (оператор), упругий элемент 7, датчик момента 8. электропривод 9, датчик 10 угла задакнцего органа, первый сумматор II, первый вход которого подключен к датчику момента 8, а выход
через последовательно соединенные усилитель 12, электрогидроусилитель 13, гидропривод 14 датчик давления 15 подключеи ко второму входу первого сумматора 11, датчик угла исполнительного органа 16, вход которого подключен к зыходу гвдропривода 14, второй сумматор 17, первый вход которого подключен к выходу датчика 10 угла, а выход через последовательно соединенные электропривод 9 и датчик угла 10 подключен ко второму входу второго сумматора 17, и нагрузку 18. Принцип действия устройства поясняется на примере вь)полнени 9 Операции повороти объекfa 3, жестко закрепленного в захвате исполнительного органа. Перемещая залающий орган 1 по траектории 4, оператор 6 воздействует на упругий элемент 7. Датчик момента 8 замеряет деформацию упругого элемента 7 и вырабатывает сигнал, пропорциональный силовому воздействию оператора 6. Этот сигнал поступает на первый вход первого сумматора. Если при этом траектория 4, задаваемая оператором, соответствует траектории 5, определяемой связями объ-/ екта 3, то на исполнительный орган 2 действуют моменты только от сил сопротивления движению, обусловленные массой объекта 3. Эти моменты замеряются датчикрм давления 15. Датчик давления 15 вырабатывает сигнал, соответствующий силовому воздействию на исполнительный сигнал 2. Сигнал датчика давления поступает на второй вход первого сумматора, где сравнивается с сигналом датчика момента 8. Сигнал разности поступает на усилитель 12, который формируетуправляющее возлействие на привод исполнительного органа 2. Управляющее воздействие поступает через электрогидроусили.тель 13 на гидропривод 14. В полостях гидропривода 14 Создаются перепады давления, которые вызывают перемещение выходного вала гидродвигателя со скоростью, . ропорциональной управляющему воздействию. Исполнительный орган 2 при этом перемегцается по траектории 5 объекта со скоростью, г.ропорциональной разности силового воздейстия на задающем 1 и исполнительном 2 органах. В случае несовпадения траектории, задаваемой оператором, с траекторией объекта на исполнительном органе возникают, моменты не только от сил сопротивления движению, обус явленных массой объекта 3, но и от реакций связей, обусловленных отклонением траектории оператора от траектории объекта. Эти моменты замеряются датчиком давления 15. Сигнал с датчика давления поступает на первый сумматор, где сравнивается с сигналом датчика момента 8. Усилитель 12 формирует сигналы управления приводом исполнительного органа, обеспечивая его движение по траектории объекта в сторону силового воздействия оператора. При этом скорость перемещения исполнительного органа по траектории объекта определяется как величиной разности силовых воздействий на задающем и исполнительном органах, так и величиной отклонения траектории, задаваемой оператором от траектории объекта. При перемещении исполнительного органа датчик угла 10 вырабатывает сигнал, соответствующий угловому положению звена исполнительного органа. Этот сигнал поступает на первый вход второго сумматора, где сравнивается с сигналом обратной связи, поступающий ot датчика угла 10. Сигналом разности управляется электропривод 9, который откручивает упругни элемент 7, сохраняя, его начальную деформацию, созданную оператором и пропорции, нальную скорости перемещения исполнительного органа. Формула изобретения Устройство для управления дистанционным манипулятором, содержащее последовательно соединенные электропривод, упругий элемент и датчик момента, датчик угла задающего органа, последовательно соединенные первый сумматор, усилитель, электрогидроусилитель, гидропривод и датчик давления, выход которого подключен ко входу первого сумматора, отличающееся тем, что, с целью расширения области применения манипулятора, устройство содержит последовательно соединенные датчик угла исполнительного органа и второй сумматор, выход которого через последовательно соединенные электропривод и датчик угла задающего органа подключен ко второму входу второго сумматора, второй выход гидропривода соёдинен со входрм датчика угла исполнительного органа, а датчика момента подключен ко второму вхоау первого сумматора. Источники информации, принятые во внимание при экспертизе:одопоп 1. Авторское свидетельство CCCF № dbyu-ги, 2 Авторское свидетельство СССР № 499108, кл. В 25 J 9/00, 1974.
Х УХУХ/У
ХХХХХХ Х
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для управления дистанционным манипулятором | 1978 |
|
SU737917A2 |
| Устройство для управления дистанционным манипулятором | 1982 |
|
SU1112341A2 |
| Устройство для управления дистанционным манипулятором | 1980 |
|
SU883862A2 |
| Устройство для управления дистанционным манипулятором | 1983 |
|
SU1095129A2 |
| Устройство для управления дистанционным манипулятором | 1985 |
|
SU1313692A1 |
| Устройство для управления дистанционным манипулятором | 1982 |
|
SU1061987A2 |
| Устройство для управления дистанционным манипулятором | 1977 |
|
SU639699A2 |
| Устройство для управления дистанционным манипулятором | 1980 |
|
SU950519A2 |
| Устройство для управления дистанционным манипулятором | 1982 |
|
SU1033308A2 |
| Устройство для управления дистанционным манипулятором | 1988 |
|
SU1650428A2 |