2. Устройство по п. 1, отличающееся тем, что в нем второй выход сумматора одного блока моделирования зависимых параметров подключен к вторым входам элементов задержки других блоков моделирования зависимых параметров.
3. Устройство по п. 1, .отличающееся тем, что в нем выход имитации аварийных ситуаций блока моделирования реальных процессой соединен с третьими входами сумматоров и узлов сопряжения.
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для обучения операторов систем управления | 1977 |
|
SU734796A1 |
| Тренажер операторов автоматизированных систем управления | 1981 |
|
SU991482A1 |
| ТРЕНАЖЕР ОПЕРАТОРОВ СИСТЕМ УПРАВЛЕНИЯ ТЕХНОЛОГИЧЕСКИМИ ПРОЦЕССАМИ | 1990 |
|
RU2047909C1 |
| ТРЕНАЖЕР ОПЕРАТОРА СИСТЕМЫ УПРАВЛЕНИЯ НЕПРЕРЫВНОЙ РАЗЛИВКОЙ СТАЛИ | 2001 |
|
RU2226006C2 |
| Устройство для обучения операторов систем управления электроприводом постоянного тока | 1987 |
|
SU1441443A1 |
| ТРЕНАЖЕР ОПЕРАТОРА СИСТЕМ УПРАВЛЕНИЯ ТЕХНОЛОГИЧЕСКИМИ ПРОЦЕССАМИ | 1991 |
|
RU2012065C1 |
| ТРЕНАЖЕР ОПЕРАТОРОВ СИСТЕМЫ УПРАВЛЕНИЯ ТЕХНОЛОГИЧЕСКИМ ПРОЦЕССОМ РАЗДЕЛЕНИЯ ИЗОТОПОВ УРАНА ЦЕНТРОБЕЖНЫМ МЕТОДОМ В ШТАТНЫХ И АВАРИЙНЫХ СИТУАЦИЯХ | 2003 |
|
RU2250509C2 |
| Тренажер машиниста одноковшового экскаватора | 1986 |
|
SU1350659A1 |
| Устройство для обучения операторов систем управления технологическими процессами | 1985 |
|
SU1249568A1 |
| Устройство для обучения и контроля совместной работы операторов | 1985 |
|
SU1345235A1 |
1. УСТРОЙСТВО ДЛЯ ОБУЧЕНИЯ ОПЕРАТОРОВ СИСТЕМ УПРАВЛЕНИЯ по авт. св. № 734796, отличающееся тем, что, с целью расширения дидактических возможностей устройства, в него введены блоки моделирования зависимых параметров, состоящие из преобразователя код-напряжение и последовательно включенных элементов задержки и сумматора, второй вход которого через преобразователь код-напряжение соединен с одним из выходов блока задания программы обучения, а первый выход - непосредственно с пятым входом индикаторного табло, первый вход элемента задержки подключен к одному из выходов блока моделирования реальных процессов, другой выход которого соединен с шестым входом индикаторного табло. СО сд tsD Ю
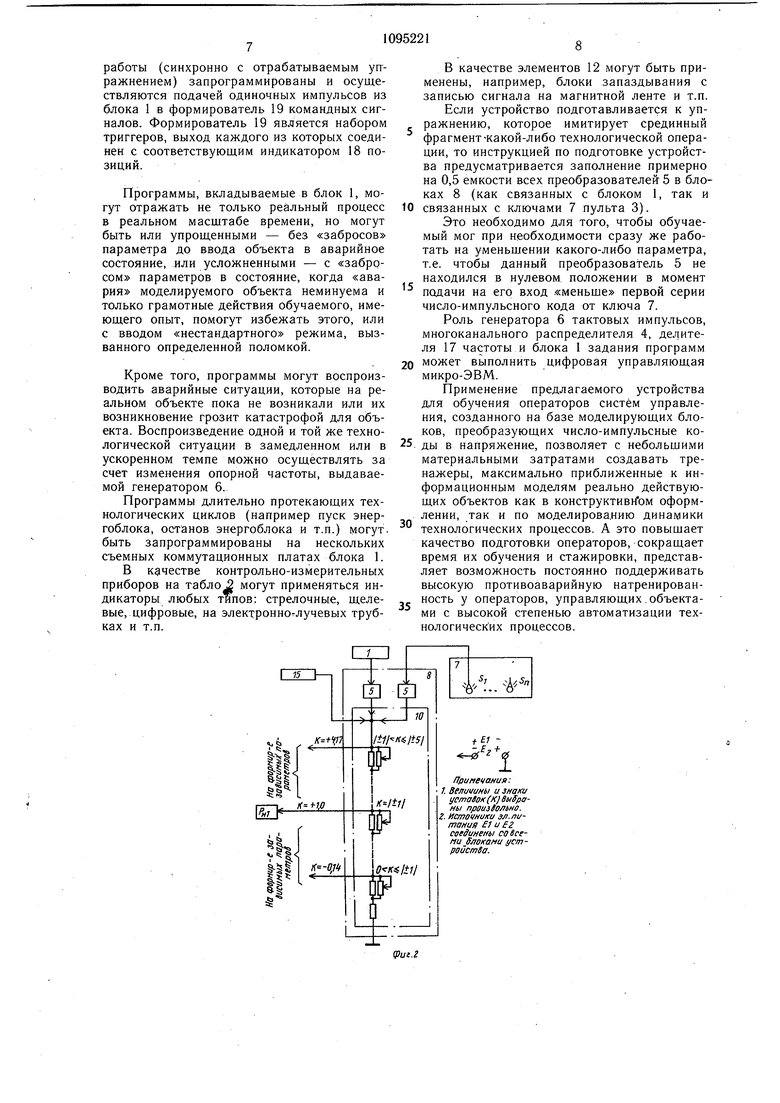
Изобретение относится к автоматике и вычислительной технике, в частности к устг йствам для обучения операторов контро.0 и управлению различными непрерывно фотекающими технологическими процессами, и может быть применено при. обучении и тренировке операторов контролю и управлению теплоэнергетическими, химическими и т.п. процессами, а также обучению диспетчерским функциям. По основному авт. св. № 734796 известно устройство, в котором используется принцип преобразования число-импульсного кода в напряжение, содержащее последовательно включенные генератор тактовых импульсов, делитель частоты, распределитель импульсов и блок задания программы, соединенный через параллельно включенные формирователь командных сигналов и блок моделирования реальных процессов с индикаторнцм табло и с пультом оператора, а также блоки суммирования, делитель частоты и блок контроля действий оператора, подключенный к пульту оператора и блоку задания программы, соединенному с блоками суммированид, один из которых подключен к индикатору, индикаторному табло и пульту оператора, а другой - к пульту оператора, соединенному через делитель частоты с генератором тактовых импульсов, при этом блоки суммирования содержат последовательно включенные преобразователи код-аналог и узел сопряжения, соединенные соответственно с входами и выходами блока. Моделирование технологических процессов в этом устройстве может осуществляться блоками суммирования, моделирующими лишь независимые параметры, каждый из которых содержит два реверсивных преобразователя код-напряжение и узел сопряжения (сумматор), соединенный с индикаторным табло и с обоими преобразователями. Причем один из преобразователей код-напряжение соединен с блоком задания программ, а другой - с соответствующим органом управления - независимым параметром, находящимся на пульте оператора 1. Недостатком известного устройства является ограниченная возможность моделирования динамики сложных технологических процессов, что отражается на качестве подготовки операторов. Целью изобретения является расширение дидактических возможностей устройства. Указанная цель достигается тем, что в устройство введены блоки моделирования зависимых параметров, состоящие из преобразователя код-напряжение и последовательно включенных элемента задержки и сумматора, второй вход которого через преобразователь код-напряжение соединен с одним из выходов блока задания программы обучения, а первый выход - непосредственно с пятым входом индикаторного табло, первый вход элемента задержки подключен к одному из выходов блока моделирования реальных процессов, другой выход которого соединен с шестым входом индикаторного табло. Кроме того, второй выход сумматора одного блока моделирования зависимых параметров подключен к вторым входам элементов задержки других блоков моделирования зависимых параметров. Выход имитации аварийных ситуаций блока моделирования реальных процессов соединен с третьими входами сумматоров и узлов сопряжения. На фиг. 1 представлено устройство для обучения операторов систем управления; на фиг. 2 и 3 - схемы работы узлов сопряжения и сумматоров. Устройство содержит блок 1 задания программы, индикаторное табло 2, пульт 3 оператора, многоканальный распределитель 4 (импульсов), реверсивные преобразователи 5 код-аналог, генератор 6 тактовых импульсов, ключи 7 управления независимыми параметрами, блоки 8 моделирования независимых параметров, контрольно-измерительные приборы 9 независимых параметров, узлы 10 сопряжения (сумматоры напряжения), блок 11 мо;1,елирования зависимых параметров, элемент 12 задержки (инерционности), контрольно-измерительные приборы 13 зависимых параметров, сигнализаторы 14 (дискретные), 6JJOK 15 моделирования реальных процессов (в том числе аварийных состояний), блок 16 контроля действия оператора.
делитель 17 частоты, индикаторы 18 позиций, формирователь 19 командных сигналов. Блоки 11 содержат кроме элементов 12 также сумматоры 20 (напряжений) и преобразователи 21 код-напряжение.
Устройство для обучения операторов систем управления работает следующим образом.
Информация о динамике моделируемого технологического процесса воспроизводится на информационной модели устройства от программы, заложенной в блоке 1. Под информационной моделью устройства понимаются контрольно-измерительные приборы и дискретные сигнализаторы, размещенные на табло 2, и частично на пульте 3 оператора. Информационная модель устройства воспроизводит динамику всех изменений, зафиксированных (заранее) на табло 2 и пульте 3 реально действующего объекта, характерных для данной технологической или аварийной cиtyaции. Но в программу по воспроизведению устройством какого-либо управления не вводится информация о динамике управляющих воздействий, осуществленных при этом оператором реально действующего объекта, т.е. от программы, заложенной в блоке 1, информация подается с «забросами тех параметров, на которые воздействовал оператор реально действующего объекта. Именно эти управляющие воздействия, необходимые для качественного и экономически обоснованного поддержания заданного технологического режима (или для оптимального режима вывода объекта из аварийного состояния), и должен выполнить сам обучаемый в определенной последовательности и в определенные моменты времени.
Программа, заложенная в блок 1, преобразует информацию о динамике реального технологического процесса (или его отдельного фрагмента) в число-импульсные коды, посылаемые по соответствующим каналам, каждый из которых, в конечном итоге, заканчивается индикатором (контрольно-измерительным прибором) или сигнализатором.
Блок 1 - это коммутационное поле, выполненное, например, на неподвижной и легкосъемной платах программного узла табулятора. Каждая клемма неподвижной платы блока 1 соединена с соответствующим выходом многоканального распределителя 4. Это означает, что каждый импульс, поступающий из распределителя 4 и порядковый номер которого известен, всегда подается на одну и ту же клемму неподвижной платы блока 1.
На каждое отрабатываемое устройством упражнение в блок 1 вводится программа (на легкосъемной плате), которая, находясь в контакте с клеммами неподвижной платы, группирует импульсы, поступающие из распределителя 4, в число-импульсные коды и направляет их к указанным в программе преобразователяц 5, имеющим связь с блоком 1.
Выбор тех или иных преобразователей 5, набор последователей число-импульсных кодов, подаваемых на соответствующие входы этих преобразователей, а также время подачи этих кодов заданы в программе. Причем отсчет времени в программе ведется по импульсам опорной частоты, выдаваемым генератором 6 (с учетом их порядковых но. меров).
.Управляющие воздействия от обучаемого
0 (пользующегося ключами 7 управления, размещенными на пульте 3) также превращаются в число-импульсные коды, но посылаемые только к тем преобразователям 5, которые связаны с ключами 7 управления, т.е. каждым ключом 7 через связанный с ним пре образователь 5 можно управлять только одним независимым параметром.
Моделирование независимых параметров, т.е. параметров, имеющих прямую связь с ключами 7 на пульте 3 (например парамет0 ром «подача топлива в котлоагрегат и т.п.), осуществляется блоками 8. Причем каждый блок 8 управляет только одним кон-, трольно-измерительным прибором 9, фиксирующим данный независимый параметр,. А каждый блок 8 содержит узел 10 и два пре5 образователя 5, один из которых соединен с блоком 1 задания программы, а другой - с соответствующим ключом 7 управления на пульте 3.
Каждый реверсивный преобразователь 5 имеет два входа: «Больше - суммирувдщий
вход и «Меньще - вычитающий вход. Если число-импульсный код подается на вход «Больще, то соответственно, числу поданных импульсов возрастает и напряжет ние на выходе преобразователя 5, и - наоборот, т.е. преобразователь 5 преобразует число-импульсные коды в непрерывно меняющиеся наЛряжения.
Каждый узел 10 блока 8 выдает не только меняющееся во времени напряжение, идущее в контрольно-измерительный прибор
9 данного независимого параметра (основное напряжение), но выдает также и синхронно меняющиеся с ним напряжения, идущие на формирование зависимых от него параметров (одного или нескольких). Величины и знаки этих напряжений соответству ют уставкам (коэффициентам равным К или -К, где К могут принимать значения от нуля до основного напряжения и более его). Применение узла 10 сопряжения в блоке 8 моделирования независимого параметQ ра показано на фиг. 2.
Моделирование зависимых параметров, т.е. параметров, не имеющих прямой связи с ключами 7 управления на ггульте 3,. а формируемых напряжениями, идущими от других параметров (например параметр «давле5 ние пара в барабане котлоагрегата, который зависит от подачи топлива, подачи воздуха; уровня воды в баке и т.д.), осуществляется блоками 11.
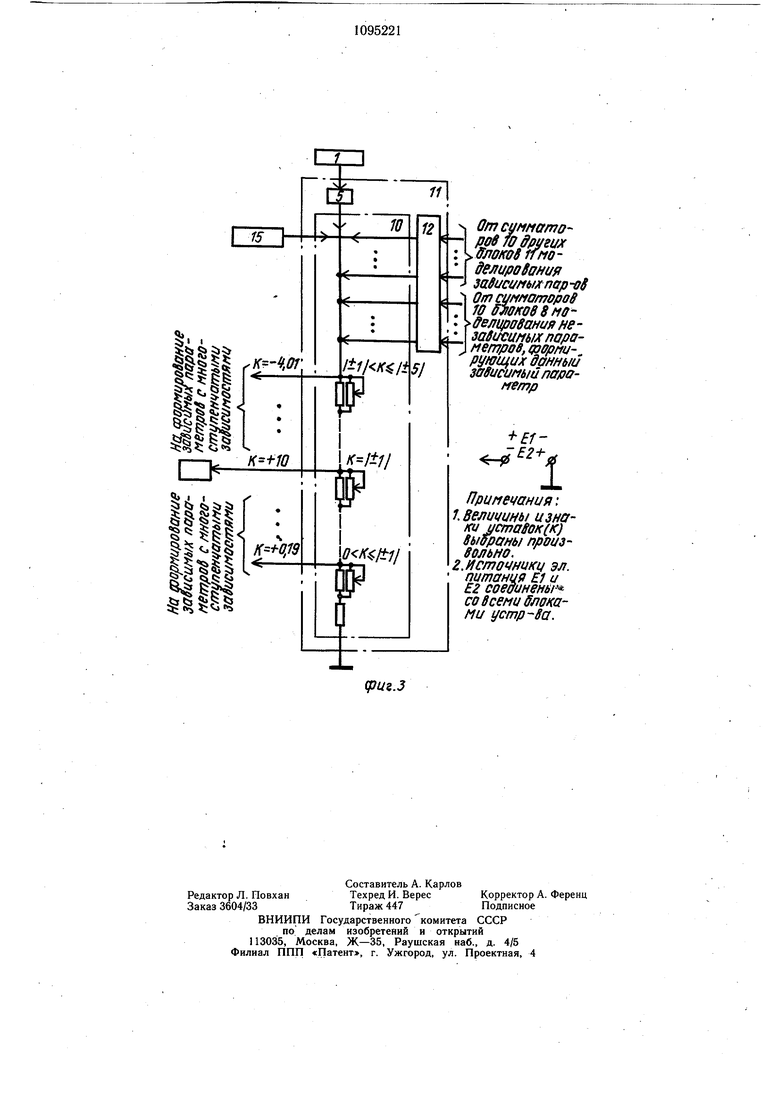
Каждый блок 11 содержит преобразователь 21, сумматор 20 и элемент 12 задержки (инерционности).
Роль моделирующего звена в блоке 11 также выполняет сумматор 20, который алгебраически суммирует напряжения, поступающие из блоков 8, формирующих данный зависимый fiapaMeTp. Причем,эти напряжения, подаваемые с различными по величине и знаку коэффициентами, предварительно проходят через элемент 12 (при необходимости время задержки подаваемого сигнала может быть и равным нулю).
Преобразователь 21 в блоке 11 имеет связь только с блоком 1, т.е. в него подается число-импульсный код только от программы и только в тех случаях, когда предусматривается усложнение какой-либо аварийной, ситуации. Сумматор 20 в блоке 11 выполняет свои функции без приоритета перед какимлибо напряжением, алгебраически их суммируя.-Сумматор 20 блока 11 выдает напряжение в контрольно-измерительный прибор 13 данного зависимого параметра (основное напряжение) и, кроме того, также выдает и синхронно меняющиеся с ним напряжения, идущие на формирование зависимых параметров с многоступенчатой зависимостью от данного зависимого параметра, что необходимо для моделирования сложных технологических процессов. С этой целью предусмотрена возможность соединения выхода сумматора 20 каждого блока 11 к элементу 12 любого другого блока- И-моделирования зависимого параметра.
Применение, сумматора 20 (напряжений) в блоке 11 моделирования зависимого параметра показано на фиг. 3.
Таким образом, блоки 8, моделирующие независимые параметры, блоки 11, моделирующие зависимые параметры, а также бло. ки 11, моделирующие параметры с многоступенчатыми зависимостями одних зависимых параметров от других зависимых параметров, соединенные между собой через элементы 12 посредством напряжений с различными по величине и знаку коэффициентами (установленными в сумматорах 20) и, кроме того, контрольно-измерительные приборы 9 и 13 и дискретные сигнализаторы 14 (транспаранты предварительной сигнализации, сигнальные лампы, сирены и т.п.) образуют модель реальнодействующего объекта.
Моделирование медленно развивающихся аварийных ситуаций осуществляется через преобразователи 5 и 21, соединенные с блоком 1 задания программы, а на заверщающем этапе подключаются соответствующие элементы блока. 15, моделирующие аварийные состояния.
Блок 15 - это набор триггеров и реле, выходы которых соединены с входами узлов 10 и сумматоров 20, а также с дискретными сигнализаторами 14. Входы элементов блока 15 соединены с блоком 1 задания программы.
Моделирование мгновенно наступающих аварийных состояний (разрыв трубопровода, короткое замыкание электрической цепи и т.п.) осуществляется блоком 15, связанным с блоком 1, а дальнейщее (иногда начальное) развитие аварийной ситуации осуществляется преобразователями 5 и 21 блоков 8 и 11, также связанными с блоком 1
О задания программы.
Контроль действий оператора осуществляется блоком 16, который обеспечивает запись управляющих воздействий обучаемого на регулируемые параметры и фиксирование
на этой же ленте отметок времени, посылаемых блоком 1,и необходимых для сравнения записи с циклограммой управляющих воздействий опытного оператора, выполнявщего эту же технологическую операцию на реально действующем объекте или на этом же
0 устройстве.
Генератор 6 тактовых импульсов выдает прямоугольные импульсы типа меандр с постоянной опорной частотой. Эти импульсы поступают на делитель 17, который имеет пять выходов для выдачи импульсов- с опор ной частотой и с частотами, уменьшенными в 2 раз, где п 1, 2, 3, 4.
Импульсы от делителя 17 поступают к распределителю 4 с частотой, уменьщенной в 2 раза, а к Ключам 7 кроме импульсов опорной частоты подводятся еще и импульсы четырех указанных частот.
Каждый ключ 7 имеет возможность ступенчатого подключения к выходам делителя 17 частоты. Больщему углу разворота ключа вправо или влево от нейтрального положе ния соответствует больщая степень положительного или отрицательного воздействия на данный независимый параметр, так как правая половина ключа 7 соединена с входом «Больще, а левая - с входом «Меньше соответствующего преобразователя 5 в
0 блоке 8.
Таким образом, работа ключей 7 управления независимыми параметрами устройства аналогична их работе на реальном пуль те оператора.
Для помощи обучаемому в овладении операциями контроля и управления данным моделируемым технологическим процессом могут выдаваться командные (обучающие) сигналы о последовательности, частоте и продолжительности обращения к соответствуюQ щим контрольно-измерительным приборам и органам управления. Командные (обучающие) сигналы выдаются загоранием индикаторов 18 позиций, расположенных под каждым контрольно-измерительным прибором и рядом с каждым органом управления (или
5 вмонтированных в каждом, контрольно-измерительном приборе и каждом ключе управления). Выбор одного или нескольких индикаторов 18, время и продолжительность их
работы (синхронно с отрабатываемым упражнением) запрограммированы и осуществляются подачей одиночных импульсов из блока 1 в формирователь 19 командных сигналов. Формирователь 19 является набором триггеров, выход каждого из которых соединен с соответствующим индикатором 18 позиций.
Программы, вкладываемые в блок 1, могут отражать не только реальный процесс в реальном масщтабе времени, но могут быть или упрощенными - без «забросов параметра до ввода объекта в аварийное состояние, или усложненными - с «забросом параметров в состояние, когда «авария моделируемого объекта неминуема и только грамотные действия обучаемого, имеющего опыт, помогут избежать этого, или с вводом «нестандартного режима, вызванного определенной поломкой.
Кроме того, программы могут воспроизводить аварийные ситуации, которые на реальном объекте пока не возникали или их возникновение грозит катастрофой для объекта. Воспроизведение одной и той же технологической ситуации в замедленном или в ускоренном темпе можно осуществлять за счет изменения опорной частоты, выдаваемой генератором 6.
Программы длительно протекающих технологических циклов (например пуск энергоблока, останов энергоблока и т.п.) могут, быть запрограммированы на нескольких съемных коммутационных платах блока 1.
В качестве контрольно-измерительных приборов на табло 2 могут применяться индикаторы любых типов: стрелочные, щелевые, цифровые, на электронноглучевых трубках и т.п.
В качестве элементов 12 могут быть применены, например, блоки запаздывания с записью сигнала на магнитной ленте и т.п.
Если устройство подготавливается к упражнению, которое имитирует срединный фрагмент-какой-либо технологической операции, то инструкцией по подготовке устройства предусматривается заполнение примерно на 0,5 емкости всех преобразователей 5 в блоках 8 (как связанных с блоком 1, так и 0 связанных с ключами 7 пульта 3).
Это необходимо для того, чтобы обучаемый мог при необходимости сразу же работать на уменьшении какого-либо параметра, т.е. чтобы данный преобразователь 5 не находился в нулевом положении в момент подачи на его вход «меньше первой серии число-импульсного кода от ключа 7.
Роль генератора 6 тактовых импульсов, многоканального распределителя 4, делителя 17 частоты и блока 1 задания программ Q может выполнить цифровая управляющая микро-ЭВМ.
Применение предлагаемого устройства для обучения операторов систем управления, созданного на базе моделирующих блоков, преобразующих число-импульсные ко5. ды в напряжение, позволяет с небольщими материальными затратами создавать тренажеры, максимально приближенные к информационным моделям реально действующих объектов как в конструктивнГом оформлении, так и по моделированию дина.мики технологических процессов. А это повышает качество подготовки операторов, сокращает время их обучения и стажировки, представляет возможность постоянно поддерживать высокую противоаварийную натренированность у операторов, управляющих.объектами с высокой степенью автоматизации технологических процессов.
qJuz.S
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Устройство для обучения операторов систем управления | 1977 |
|
SU734796A1 |
| Кипятильник для воды | 1921 |
|
SU5A1 |
