2. Устройство ПОП.1, отличающееся тем, что блок управления выполнен в виде двук элементов И, (элементов ИЛИ и НЕ, четырех нуль-индикаторов, четырех нормализаторов сигналов, двух элементов эквивалентности и трех ключей, причем выходы первых двзгх нормализаторов сигналов соединены с входами первого элемента эквивалентности, выход которого соединен с одним из входов первого элемента И, другой вход которого подключен к выходу элемента НЕ и одному из входой второго ключа, второй вход которого соединен с входами второго нормализатора сигналов и является третьим входом блока управления, выход первого элемента И соединен с одним из входов элемента ИЛИ, второй вход которого соединен с выходом третьего нуль-индикатора, вход которого является вторым входом блока управления, выход второго нуль-индикатора соединен с третьим входом элемента ИЛИ, выход которого соединен с одним из входов первого ключа, другой вход
которого соединен с входом первого ;нормализатора сигналов и является первым входом блока управления, выхо Т1 етьего нуль-индикатора соединен с ,одним из входов второго элемента И, второй вход которого соединен с выходом второго элемента эквивалентности входы которого соединены с выходами третьего и четвертого нормализаторов сигналов, вход третьего нормализатор ра сигналов объединен с входом третьего нуль-индикатора и является четвертым входом блока управления, вход четвертого нормализатора сигналов объединен с входом четвертого нульиндикатора и является пятым входом блока управления, шестым йходом которого является один из входов третьего ключа, выход четвертого нульиндикатора соединен с третьим входом (Второго элемента И, выход которого .соединен с одним из входов третьего ;к1;юча и с входом элемента НЕ, выходы всех трех ключей соединены между со|бой и являются выходом блока управления .


| название | год | авторы | номер документа |
|---|---|---|---|
| Реверсивный электропривод постоянного тока | 1987 |
|
SU1422351A1 |
| Устройство для управления водоснабжением участка гидрошахты | 1982 |
|
SU1115020A1 |
| Устройство для централизованного контроля параметров | 1986 |
|
SU1348777A1 |
| Частотно-регулируемый асинхронный электропривод | 1985 |
|
SU1282302A1 |
| Реверсивный вентильный электродви-гАТЕль | 1979 |
|
SU813608A1 |
| Электропривод переменного тока | 1986 |
|
SU1378004A1 |
| УСТРОЙСТВО ДЛЯ ОПРЕДЕЛЕНИЯ РЕЗОНАНСНЫХ ЧАСТОТ ОБЪЕКТА | 1991 |
|
RU2025684C1 |
| НАВИГАЦИОННЫЙ КОМПЛЕКС ЛЕТАТЕЛЬНОГО АППАРАТА | 2000 |
|
RU2170409C1 |
| Устройство для определения резонансных частот объекта | 1990 |
|
SU1744554A1 |
| СИЛОКОМПЕНСИРУЮЩИЙ ЭЛЕКТРОПРИВОД СБАЛАНСИРОВАННОГО МАНИПУЛЯТОРА | 2011 |
|
RU2454694C1 |

1. УСТРОЙСТВО ДЛЯ УПРАВЛЕНИЯ КОНВЕЙЕРНОЙ ЛИНИЕЙ, содержащее приводы, регуляторы скорости, блоки срав- ; нения и подключенные к ним датчики скорости конвейеров, отличающееся тем, что, с целью повышения точности и быстродействия, оно снабжено блоками пуска и торможения .по числу конвейеров в линии, блоком определения текущего значения средней скорости конвейера в линии, блоком управления, причем выход блока управления подключен к входу первого регулятора скорости, выход каждого регу-. лятора скорости подсоединен через соответствующий блок пуска и торможения к приводу соответствующего конвейера, выходы датчиков скорости первого и последнего конвейеров в линии подключены через блоки сравнения соответственно к регуляторам скорости первого и последнего конвейеров, первый вход блока управления подключен к выходу блока сравнения заданной величины скорости конвейера с действительной скоростью, второй - к датчику скорости этого конвейера, третий - к выходу четвертого блока сравнения, датчики скорости всех конвейеров через блок W определения средней величины скорости соединены с одним из входов четвертого блока сравнения, четвертый и пятый входы блока управления подключены к блокам сравнения скоростей смежных конвейеров, шестой вход подсоединен через сумматор к блокам сравнения скоростей смежных конвейеров, выход блока управления подключен к регулятору СП скорости промежуточного конвейера, а СП выходы каждого регулятора скорости через соответствующие блоки пуска соеУ1 динены с соответствующими приводами.
Устройство для управления конвейерной линией относится к средствам контроля и управления приводом конвейера в линии и может быть использовано в системах согласования скоростей приводов различных технологических линий, например конвейерной линии роторного экскаватора.
Известны устройства, содержащие блоки управления приводами и подключенные к ним через блоки сравнения заданного и действительного -значения скорости датчики действительного значения скорости ленты конвейеров.
Недостатком такого устройства яв ляется то,:что оно не позволяет согласовать скорости смежных конвейеров при, пуске и остановке. Вследствие этого наблюдаются просыпи транспортируемого материала в местах перегрузки с на конвейер и опорожнения участков ленты.
Известно также устройство для уп- равления конвейерной линией, содержащее приводы, регуляторы скорости, блоки сравнения и подключенные к ним датчики скорости конвейеров.
Недостатками этого устройства являются низкая точность и быстродействие,.
Целью изобретения является повышение точности и быстродействия.
Цель достигается тем, что устройство для управления конвейерной линией, содержащее приводы, регуляторы скорости, блоки сравнения и подключенные к ним датчики скорости конвейеров.
снабжено блоками пуска и торможения по числу конвейеров в линии, блоком
определения текущего значения средней
скорости конвейера в линии, блоком управления, причем выход блока згправления подключен к входу первого регзглятора скорости, ход каждого регулятора скорости подсоединен через соответствующий блок регулируемого пуска и торможения к приводу соответствующего конвейера, выходы датчиков скорости первого и последнего конвейеров
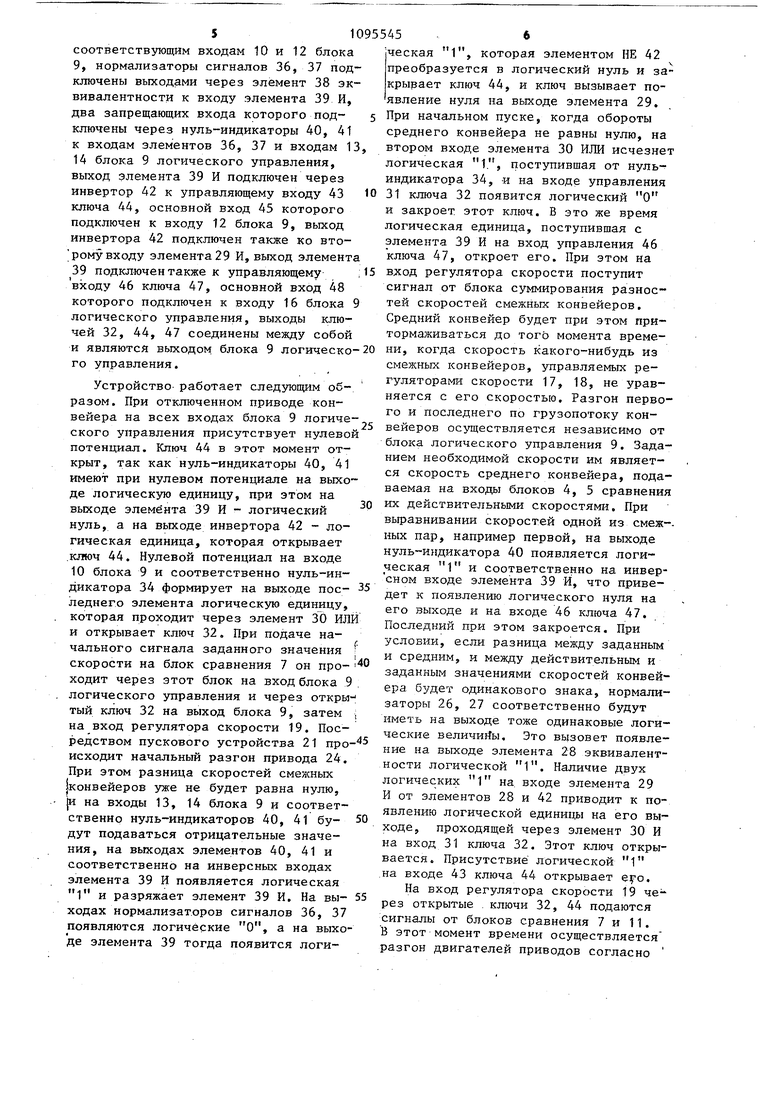
в линий подключены через блоки сравнения соответственно к регуляторам скорости первого и последнего конвейеров, первый вход блока управления подключен к выходу блока сравнения заданной j величины скорости конвейера с действительной скоростью, второй - к датчику скорости этого конвейера, третий к выходу четвертого блока сравнения. датчики скорости всех конвейеров че рез блок определения средней величины скорости соединены с одним из вхо дов четвертого блока сравнения, четвертый и пятый входы блока управлени подключены к блокам сравнения скорое тей смежных конвейеров, шестой вход подсоединен через сумматор к блокам сравнения скоростей смежных конвейеров, выход блока управления подключен к регулятору скорости промежуточ ного конвейера, а выходы каждого регулятора скорости через соответствую щие блоки пуска соединены с соответствующими приводами. Блок управления выполнен в виде двух элементов И, элементов ИЛИ и НЕ четырех нуль-индикаторов, четьфех нормализаторов сигналов, двух элемен тов эквивалентности и трех ключей, причем выходы первых двух нормализа|торов сигналов соединены с входами первого элемента эквивалентности, вы ход которого соединен с одним из вхо дов первого элемента И, другой вход которого подключен к выходу элемента НЕ и одному из входов второго ключа, второй вход которого соединен с входами второго нормализатора сигналов и является третьим входом блока управления, выход первого элемента И соединен с одним из входов элемента ИЛИ, второй вход которого соединен с выходом третьего нуль-индикатора, вход которого является вторым входом блока управления, выход второго нуль-индикатора соединен с третьим входом элемента ИЛИ, выход которого соединен с одним из входов первого ключа, другой вход которого соединен с входом первого нормализатора сигналов и является первым входом блока управления, выхо третьего нуль-индикатора соединен с одним из входов второго элемента И, второй вход которого соединен с выходом второго, элемента эквивалентности, входы которого соединены с выходами третьего и четвертого нормализаторов сигналов, вход третьего нормализатора сигналов объединен с входом третьего нуль-индикатора и является четвертым входом блока управления, вход четвертого нормализатора сигнала объединен с входом четвертого нуль-индикатора и является пятым входом блока управления, шестым входом которого является один из входов третьего ключа, выход четвертого нульиндикатора соединен с третьим входом второго элемента И, выход которого соединен с одним из входов третьего ключа и с входом элемента НЕ, выходы всех трех ключей соединены между собой и являются выходом блока управления . На фиг.1 приведена структурная схема устройства; на фиг.2 - функциональная схема блока управления. Устройство для управления конвейерной линией, например, состоящей из трех конвейеров, состоит из датчиков скорости конвейеров 1, 2, 3, подключенных к блокам сравнения 4 и 5, к блоку определения величины средней скорости конвейера в линии 6, при этом датчик скорости 2 подключен через блок 7 сравнения с заданной величиной скорости к входу 8 блока 9 логического управления и подключен к входу 10 и через блок 11 сравнения заданной скорости с величиной средней скорости конвейера в линии к входу ;12 блока 9 логического управления, выходы блоков 4,5 сравнения соответственно подключены к входам 1-3,, 14 блока 9 логического управления, через сумматор 15 - к входу 16 блока 9 логического управления, а такнсе подключены соответственно к регуляторам скорости 17, 18, вход регулятора скорости 19 подключен к выходу блока 9 логического управления, выходы регуляторов скорости 17, 18, 19 подсоединены соответственно через блоки 20, 21, 22 регулируемого пуска и торможения к приводам 23, 24, 25 конвейеров, кроме того, логическое устройство содержит нормализаторы сигналов 26, 27, подключенные к элементу 28 эквивалентности, выход которого подсоединен через элемент 29 И и элемент 30 ИЛИ к входу 31 ключа 32, основной вход 33 которого подключен к входу 8 блока 9, при этом второй и третий входы элемента 30 ИЛИ подключены через нуль-индикаторы 34, 35 к соответствующим входам 10 и 12 блока 9, нормализаторы сигналов 36, 37 подключены выходами через элемент 38 эквивалентности к входу элемента 39 И, два запрещающих входа которого подключены через нуль-индикаторы 40, 41 к входам элементов 36, 37 и входам 13 14 блока 9 логического управления, выход элемента 39 И подключен через инвертор 42 к управляющему входу 43 ключа 44, основной вход 45 которого подключен к входу 12 блока 9, выход инвертора 42 подключен также ко второму входу элемента 29 И, выход элемент 39 подключен также к управляющему входу 46 ключа 47, основной вход 48 которого подключен к входу 16 блока логического управления, выходы ключей 32, 44, 47 соединены между собой и являются выходом блока 9 логическо го управления. Устройство- работает следующим образом. При отключенном приводе конвейера на всех входах блока 9 логиче ского управления присутствует нулево потенциал. Ключ 44 в этот момент открыт, так как нуль-индикаторы 40, 41 имеют при нулевом потенциале на выхо де логическую единицу, при этом на выходе элемента 39 И - логический нуль, а на выходе инвертора 42 - логическая единица, которая открывает .ключ 44. Нулевой потенциал на входе 10 блока 9 и соответственно нуль-индикатора 34 формирует на выходе последнего элемента логическую единицу, которая проходит через элемент 30 ИЛ и открывает ключ 32. При подаче начального сигнала заданного значения скорости на блок сравнения 7 он проходит через этот блок на вход блока 9 логического управления и через откры тый ключ 32 на выход блока 9, затем на вход регулятора скорости 19. Посредством пускового устройства 21 про исходит начальный разгон привода 24. При этом разница скоростей смежных |конвейеров уже не будет равна нулю, |и на входы 13, 14 блока 9 и соответственно нуль-индикаторов 40, 41 будут подаваться отрицательные значения, на выходах элементов 40, 41 и соответственно на инверсных входах элемента 39 И появляется логическая 1 и разряжает элемент 39 И. На выходах нормализаторов сигналов 36, 37 появляются логические О, а на выхо де элемента 39 тогда появится логическая 1, которая элементом НЕ 42 преобразуется в логический нуль и закрывает ключ 44, и ключ вызывает появление нуля на выходе элемента 29, При начальном пуске, когда обороты среднего конвейера не равны нулю, на втором входе элемента 30 ИЛИ исчезнет логическая 1, поступившая от нульиндикатора 34, и на входе управления 31 ключа 32 появится логический О и закроет этот ключ. В это же время логическая единица, поступившая с элемента 39 И на вход управления 46 ключа 47, откроет его. При этом на вход регулятора скорости поступит сигнал от блока суммирования разностей скоростей смежных конвейеров. Средний конвейер будет при этом притормаживаться до того момента времени, когда скорость какого-нибудь из смежных конвейеров, управляемых регуляторами скорости 17, 18, не уравняется с его скоростью. Разгон первого и последнего по грузопотоку конвейеров осуществляется независимо от блока логического управления 9. Заданием необходимой скорости им является скорость среднего конвейера, подаваемая на входы блоков 4, 5 сравнения их действительными скоростями. При выравнивании скоростей одной из смеж-ных пар, например первой, на выходе нуль-индикатора 40 появляется логическая 1 и соответственно на инверсном входе элемента 39 И, что приведет к появлению логического нуля на его выходе и на входе 46 ключа 47. Последний при этом закроется. При условии, если разница между заданным и средним, и между действительным и заданным значениями скоростей конвейера будет одинакового знака, нормализаторы 26, 27 соответственно будут иметь на выходе тоже одинаковые логические величины. Это вызовет появление на выходе элемента 28 эквивалентности логической 1. Наличие двух логических 1 на входе элемента 29 И от элементов 28 и 42 приводит к появлению логической единицы на его выходе, проходящей через элемент 30 И на вход 31 ключа 32. Этот ключ открывается. Присутствие логической 1 на входе 43 ключа 44 открывает . На вход регулятора скорости 19 через открытые ключи 32, 44 подаются сигналы от блоков сравнения 7 и 11. В этот момент времени осуществляется разгон двигателей приводов согласно заданного значения и происходит одновременная коррекция по средней скорости конвейеров в линии. Такой процесс осуществляется до тех пор, пока сигна лы, пропорциональные разностям скоростей, поступаемые с блоков сравнения 7 и 11 на входы 8, 12 блока 9 логического управления и соответственно на входы нормализаторов 26, 27, будут одинакового знака, т. е. заданное зна чение и среднее значение одновременно или больше, или меньше действительного значения скорости среднего конвейера. В-противном случае на выходе эле мента 28 эквивалентности появится логический О, который вызовет появление также О на выходе элементов 29, 30 и закроет ключ 32. Этот момент времени будет характеризоваться управ лением привода среднего конвейера только средним значением, так как будет открыт только ключ 44, и на вход регулятора скорости 19 будет подавать ся толькд разность среднего и действительного значений скоростей конвейера от блока 11 сравнения через вход 12 блока 9 логического управления, ключ 44. При равенстве значений средней и текущей скорости конвейера на выходе блока 11 сравнения образуется нуль и привод 24 станет управляться по уровню заданного значения скорости так как у нуль-индикатора 35 при нуле
фиг.1 на его входе, на выходе его появится логическая t и откроет кл(оч 32. На входе регулятора 19 скорости появится сигнал с выхода блока 7 сравнения, через вход 8 блока 9 логического управления, вход 33 ключа 32, выход блока 9 логического управления этот процесс регулирования будет продолжаться до конца пуска, когда произойдет выравнивание заданно го и фактического значений скорости, Точно также устройство работает и в процессе остановки конвейера. Таким образом, предложенное устройство управления конвейерной линией обеспечивает более точное согласование скоростей конвейеров в линии во время их пуска и торможения за счет приоритетного регулирования именно по критерию согласования скоростей смежных конвейеров. Отработка же системой регулирования задающего воздействия осуществляется после удовлетворения условий регулирова ния по критерию согласования ско|ростей. Кроме того, устройство обеспечивает оптимальное по быстродействию торможение конвейера вследствие применения регулируемого тормозного устройства на всех конвейерах.
| Шолтыш В.П | |||
| К разработке автоматических систем управления электроприводами мощных конвейерных линий | |||
| Горный журнал, № 10, 1972 | |||
| Устройство для управления конвейерной линией | 1979 |
|
SU876525A1 |
| Разборное приспособление для накатки на рельсы сошедших с них колес подвижного состава | 1920 |
|
SU65A1 |
| ; | |||
