Изобретение относится к автоматическому управлению и может быть использовано при создании силокомпенсирующих электроприводов сбалансированных манипуляторов и погрузочно-разгрузочных роботов.
Известен электропривод сбалансированного манипулятора, содержащий последовательно соединенные первый сумматор, регулятор скорости, второй сумматор, регулятор тока, тиристорный преобразователь, датчик тока, двигатель и исполнительный механизм, а также датчик скорости, вход которого подключен ко второму выходу двигателя, а выход соединен со вторым входом первого сумматора, при этом второй выход датчика тока соединен со вторым входом второго сумматора (см. Сбалансированные манипуляторы. И.Л. Владев, В.Н. Данилевский, П.Б.Ионов и др. Под ред. П.Н.Белянина. - М., 1988, с.165).
Недостатком данного электропривода является то, что он не предусматривает сохранение показателей качества управления скоростью вертикального перемещения, связанного с исполнительным механизмом груза при изменении силы тяжести груза в широких пределах.
Известен также самонастраивающийся электропривод, содержащий последовательно соединенные первый сумматор, инерционное дифференцирующее звено, блок умножения, второй сумматор, второй вход которого через апериодическое звено подключен к выходу первого сумматора, усилитель, электродвигатель, редуктор, на выходном валу которого установлен датчик положения, выход которого подключен ко второму входу первого сумматора, первый вход которого соединен с входом электропривода, а также датчик скорости, установленный на выходном валу электродвигателя, последовательно соединенные датчик тока электродвигателя, третий сумматор и интегратор, а также блок деления, отличающийся тем, что второй вход третьего сумматора через первый релейный элемент подключен к выходу датчика скорости, а также к входам первого выпрямителя и второго релейного элемента, первый вход блока деления через второй выпрямитель соединен с выходом интегратора, его второй вход подключен к выходу первого выпрямителя, а выход - к первому входу элемента выборки-хранения, второй вход которого соединен с выходом второго релейного элемента, а выход через функциональный преобразователь, реализующий кусочно-линейную аппроксимацию нелинейной функции, обратной частоте среза амплитудно-частотной характеристики электропривода и зависящей от изменяющегося суммарного приведенного момента инерции ротора электродвигателя и вращающихся частей редуктора с объектом управления - со вторым входом блока умножения (см. патент RU 2397529 С2, опубл. 20.08.2010).
Данное устройство по своей технической сущности является наиболее близким к предлагаемому изобретению. Однако его недостатком является то, что оно обеспечивает подстройку электропривода к изменению только суммарного момента инерции (в том числе из-за изменения силы тяжести груза), причем только для электропривода постоянного тока.
Задачей, на решение которой направлено заявляемое техническое устройство, является управление вертикальным перемещением груза сбалансированного манипулятора с компенсацией силы тяжести груза.
Технический результат, который может быть получен при реализации заявляемого технического решения, выражается в формировании дополнительного сигнала управления моментом электродвигателя, пропорционального прикладываемому к грузу внешнему усилию, при этом обеспечивается манипулирование грузом при силовой компенсации его тяжести.
Поставленная задача решается тем, что силокомпенсирующий электропривод сбалансированного манипулятора содержит последовательно соединенные первый сумматор, регулирующий усилитель момента, электродвигатель, передаточное устройство (например, редуктор, пантограф и грузовой блок) и объект управления (груз), а также второй сумматор, дополнительно введены задатчик минимального момента, выход которого соединен с первым входом первого сумматора, задатчик силы тяжести груза, выход которого соединен с первым входом второго сумматора, последовательно соединенные датчик усилия, вычислительный блок и первый ключ, выход которого соединен со вторым входом первого сумматора, регулятор усилия, выход которого соединен со вторым входом ключа, а вход связан с выходом второго сумматора и вторым входом вычислительного блока, кнопка сброса, выход которой соединен с третьим входом вычислительного блока, индикатор автоматического режима работы, подключенный к первому выходу вычислительного блока, индикатор ручного режима работы, подключенный ко второму выходу вычислительного блока, третий выход которого соединен со вторым входом второго сумматора, последовательно соединенные задатчик момента и второй ключ, выход которого соединен с третьим входом первого сумматора, кнопка пуска, выход которой соединен с четвертым входом вычислительного блока, вход датчика усилия подключен к выходу передаточного устройства (между пантографом и грузовым блоком), выход датчика усилия соединен с третьим входом второго сумматора, а второй вход второго ключа соединен с четвертым выходом вычислительного блока.
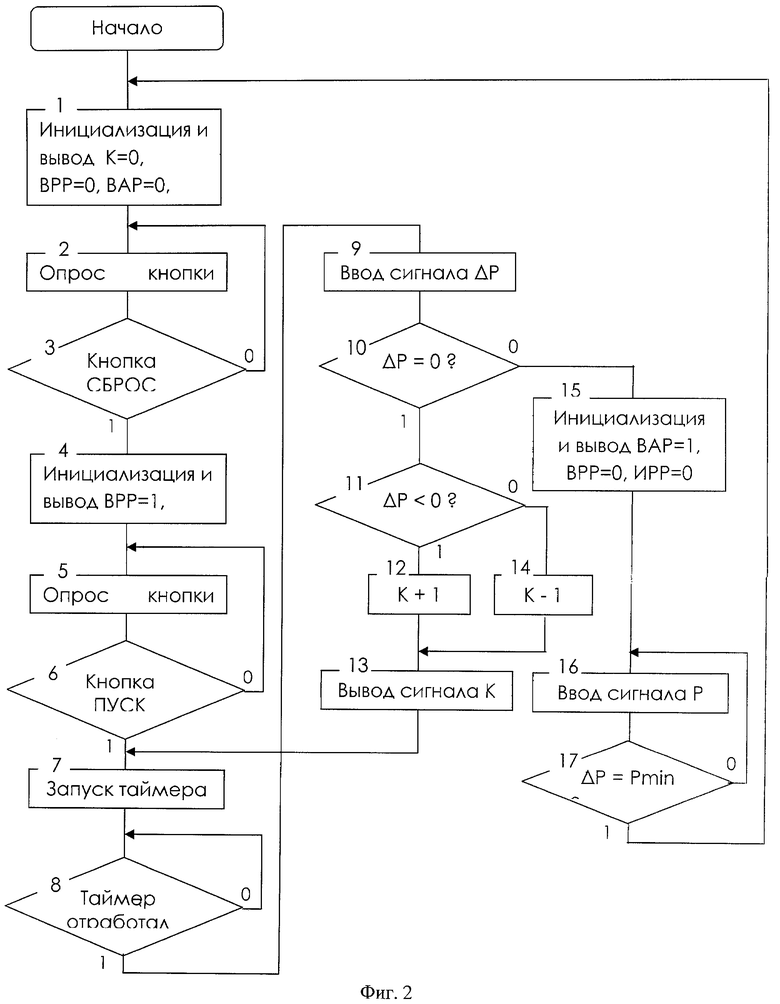
На фиг.1 приведена функциональная схема силокомпенсирующего электропривода сбалансированного манипулятора.
На фиг.2 приведена структурная схема алгоритма работы вычислительного блока.
Силокомпенсирующий электропривод сбалансированного манипулятора (см. фиг.1) содержит последовательно соединенные первый сумматор 1, регулирующий усилитель момента 2, электродвигатель 3, передаточное устройство 4, редуктор, пантограф и грузовой блок и объект управления 5 (груз), а также второй сумматор 6, задатчик минимального момента 7, выход которого соединен с первым входом первого сумматора 1, задатчик силы тяжести груза 8, выход которого соединен с первым входом второго сумматора 6, последовательно соединенные датчик усилия 9, вычислительный блок 10 и первый ключ 11, выход которого соединен со вторым входом первого сумматора 1, регулятор усилия 12, выход которого соединен со вторым входом первого ключа 11, а вход связан с выходом второго сумматора 6 и вторым входом вычислительного блока 10, кнопка сброса 13, выход которой соединен с третьим входом вычислительного блока 10, индикатор автоматического режима работы 14, подключенный к первому выходу вычислительного блока 10, индикатор ручного режима работы 15, подключенный ко второму выходу вычислительного блока 10, третий выход которого соединен с вторым входом второго сумматора 6, последовательно соединенные задатчик момента 16 и второй ключ 17, выход которого соединен с третьим входом первого сумматора 1, кнопка пуска 18, выход которой соединен с четвертым входом вычислительного блока 10, вход датчика усилия 9 подключен к выходу передаточного устройства 4 (между пантографом и грузовым блоком), выход датчика усилия 9 соединен с третьим входом второго сумматора 6, а второй вход второго ключа 17 соединен с четвертым выходом вычислительного блока 10.
Силокомпенсирующий электропривод сбалансированного манипулятора работает следующим образом.
При включении силокомпенсирующего электропривода сбалансированного манипулятора он переходит в исходное состояние, в котором на всех выходах вычислительного блока 10 сигналы равны нулю. Нулевой сигнал на первом выходе вычислительного блока 10 приводит к тому, что первый ключ 11 размыкает контур автоматического регулирования усилия, состоящий из задатчика силы тяжести груза 8, второго сумматора 6, регулятора усилия 12, первого ключа 11, первого сумматора 1, регулирующего усилителя момента 2, электродвигателя 3, передаточного устройства 4 и датчика усилия 9. При этом индикатор автоматического режима работы 14, индикатор ручного режима работы 15 выключены. Нулевой сигнал с четвертого выхода вычислительного блока 10 поступает на второй вход второго ключа 17, который отключает от третьего входа первого сумматора выход задатчика момента 16. Поэтому при первоначальном включении силокомпенсирующего электропривода сбалансированного манипулятора на первый сумматор 1 поступает только сигнал от задатчика минимального момента 7, соответствующего ненагруженному сбалансированному манипулятору, когда к его грузовому блоку исполнительного устройства 4 не подключен никакой объект управления 5 (груз). При этом сигнал от задатчика минимального момента 7 через первый сумматор 1 поступает на вход регулирующего усилителя момента 2, который на своем выходе формирует сигнал, поступающий на вход электродвигателя 3 и создающий на валу электродвигателя 3 момент, соответствующий такому развиваемому электродвигателем усилию, при котором он может удерживать ненагруженное передаточное устройство неподвижно. Сигнал на выходе задатчика минимального момента 7 подбирается заблаговременно, но при возможном самопроизвольном движении передаточного устройства 4 может быть с помощью задатчика минимального момента 16 скорректирован оператором сбалансированного манипулятора до его полной остановки в ненагруженном состоянии. После подключения к передаточному механизму объекта управления 5 (груза) оператор сбалансированного манипулятора нажимает кнопку сброса 13, выходной сигнал которой поступает на третий вход вычислительного блока 10. По этому сигналу вычислительный блок 10 формирует на своем четвертом выходе сигнал, поступающий на второй вход второго ключа 17, по которому последний подключает выход задатчика момента 16 к третьему входу первого сумматора 1. При этом силокомпенсирующий электропривод сбалансированного манипулятора переходит в ручной режим работы, а вычислительный блок 10 на своем втором выходе формирует сигнал, по которому включается индикатор ручного режима работы 15. В ручном режиме работы управление перемещением объекта управления 5 (груза) по вертикали осуществляется оператором сбалансированного манипулятора при помощи задатчика момента 16, когда объект управления 5 переводится в исходную точку диапазона перемещения по вертикали (например, в среднюю), а скорость и ускорение движения объекта управления 5 определяются уровнем сигнала задатчика момента 16. Этот сигнал в первом сумматоре 1 складывается с выходным сигналом задатчика минимального момента 7 и поступает на вход регулирующего усилителя момента 2, который создает на валу электродвигателя 3 момент, соответствующий такому развиваемому электродвигателем усилию, при котором он с помощью передаточного устройства 4 может удерживать объект управления 5 на весу и перемещать его по вертикали, преодолевая его силу тяжести, а также силу тяжести и силу сопротивления механических элементов, входящих в состав передаточного устройства 4. После установки объекта управления 5 в требуемой точке диапазона перемещения по вертикали электродвигатель 3 с помощью задатчика момента 16 останавливается в таком положении, когда создаваемое им усилие полностью компенсирует не только силу тяжести объекта управления 5, но силу тяжести и силу сопротивления элементов механической цепи, соединяющей электродвигатель 3 с объектом управления 5.
Заблаговременно установленный сигнал задатчика силы тяжести груза 8, соответствующий среднему весу Рср объекта управления 5 данного типа, поступает на первый вход второго сумматора 6, на третий вычитающий вход которого поступает сигнал от датчика усилия 9, пропорциональный фактической силе тяжести Р объекта управления 5. В общем случае фактическая сила тяжести Р объекта управления 5 не равна заранее установленному среднему значению силы тяжести Рср объекта управления 5 данного типа, поэтому в результате на выходе второго сумматора 6 формируется сигнал рассогласования ΔР, пропорциональный разности (Рср-Р) и отличающийся в общем случае от нулевого значения, соответствующего полной компенсации силы тяжести объекта управления 5 и компенсирующего ее усилия, развиваемого электродвигателем 3. Компенсация веса объекта управления 5 осуществляется при нажатии оператором сбалансированного манипулятора кнопки пуска 18, сигнал от которой поступает на четвертый вход вычислительного блока 10. По этому сигналу вычислительный блок 10 переходит к процессу компенсации сигнала ΔР, поступающего на второй вход вычислительного блока 10. Компенсация сигнала ΔР осуществляется путем формирования на третьем выходе вычислительного блока 10 линейно нарастающего по амплитуде сигнала компенсации, поступающего на второй вход второго сумматора 6 и имеющего такую полярность, которая приводит к уменьшению величины сигнала рассогласования усилий ΔР. Темп нарастания сигнала компенсации на втором выходе вычислительного блока 10 обеспечивается таким, чтобы при максимально допустимом рассогласовании сигналов от датчика усилия 9 и задатчика силы тяжести груза 8 не происходило рывков в движении объекта управления 5. В процессе компенсации сигнала ΔР вычислительный блок проверяет на равенство нулю значения выходного сигнала ΔР второго сумматора 6. Когда сигнал ΔР становится равным нулю, вычислительный блок 10 формирует на своем первом выходе сигнал, который включает индикатор 14 перехода силокомпенсирующего электропривода сбалансированного манипулятора в автоматический режим работы, оповещая оператора сбалансированного манипулятора об окончании процесса полной компенсации силы тяжести объекта управления 5. Одновременно выходной сигнал с первого выхода вычислительного блока 10 поступает на первый вход первого ключа 11, который подключает выход блока регулирования усилия 12 ко второму входу первого сумматора 1 и замыкает контур управления усилием в автоматическом режиме работы электропривода. Поскольку сигнал на выходе второго сумматора 6 равен нулю, сигнал на выходе регулирующего усилителя момента 2 остается соответствующим суммарному сигналу от задатчика минимального момента 7 и задатчика момента 16, и объект управления 5 остается неподвижным. При переходе в автоматический режим работы вычислительный блок формирует на своем втором выходе сигнал выключения индикатора ручного режима работы 15.
Автоматический режим соответствует штатной деятельности оператора сбалансированного манипулятора, когда он с помощью закрепленной на грузовом блоке ручки (на фиг.1 не показано) или воздействуя вручную непосредственно на объект управления 5 (груз) прилагает направленные в вертикальном направлении усилия. Эти усилия в зависимости от их величины и продолжительности, а также сил трения и суммарной силы инерции электродвигателя 3, передаточного устройства 4 и объекта управления 5 приводят к соответствующему перемещению объекта управления 5 в требуемом оператору сбалансированного манипулятора направлении. Эти усилия вызывают пропорциональное их величине изменение показаний датчика усилия 9 на величину ΔР, что вызывает появление такого же сигнала на выходе второго сумматора 6 и, следовательно, на входе регулятора усилия 12. По сигналу ΔР регулятор усилия 12 формирует сигнал управляющего воздействия, например, по закону пропорционально-дифференциального управления, и выдает его через замкнутый первый ключ 11 на второй вход первого сумматора 1. Сигнал управляющего воздействия, сформированный регулятором 12, складывается первым сумматором 1 с выходными сигналами задатчиков момента 7 и 16 и подается на вход регулирующего усилителя момента 2. Изменение сигнала на входе регулирующего усилителя момента 2 приводит к изменению его выходного сигнала, поступающего на электродвигатель 3 и определяющего момент на валу электродвигателя 3. Поэтому в результате приложения внешнего усилия к объекту управления 5 происходит изменение момента на валу электродвигателя 3, причем таким образом, что этот измененный момент создает дополнительное усилие, перемещающее объект управления 5 в течение приложения к нему внешнего воздействия. Таким образом, электродвигатель 3, кроме компенсации силы тяжести объекта управления 5, оказывает на него дополнительное воздействие, соответствующее приложенному к нему внешнему усилию и позволяющее преодолевать силы трения механических элементов кинематической цепи электродвигатель 3 - объект управления 5. Движение объекта управления 5 независимо от его направления происходит со скоростью, соответствующей величине приложенного к нему оператором сбалансированного манипулятора внешнего усилия, до тех пор, пока оператор прилагает это усилие, а стремление объекта управления 5 двигаться по инерции после снятия внешнего усилия оператор сбалансированного манипулятора может прекратить приложением к нему внешнего усилия, противоположного направлению движения объекта управления 5 по инерции.
Если массогабаритные параметры объекта управления 5 или его расположение по высоте не позволяют оператору сбалансированного манипулятора непосредственно воздействовать на объект управления 5 или ручку грузового блока передаточного устройства 4, то оператор может воспользоваться дистанционным управлением с помощью задатчика момента 16, перемещая объект управления 5 по вертикали в требуемом направлении, но во избежание рывков и раскачивания груза со скоростью, существенно меньшей скорости, допустимой при непосредственном силовом воздействии на объект управления 5 (или ручку грузового блока манипулятора).
При окончании манипулирования перемещением объекта управления 5 (в том числе и в горизонтальной плоскости) оператор сбалансированного манипулятора отключает объект управления 5 от передаточного устройства 4, в результате чего уменьшается уровень выходного сигнала датчика усилия 9. Поскольку выходной сигнал датчика усилия 9 постоянно поступает на первый вход вычислительного блока 10, это позволяет вычислительному блоку 10 обнаруживать момент отключения груза от сбалансированного манипулятора. Поэтому в момент отключения груза вычислительный блок 10 изменяет сигналы на своих первом и втором выходах. Сигнал с первого выхода вычислительного блока 10 поступает на первый вход первого ключа 11 и на индикатор автоматического режима работы 14. При этом первым ключом 11 размыкается контур регулирования усилия и одновременно выключается индикатор автоматического режима работы 14. В результате этого действия прекращается поступление управляющего воздействии от регулятора усилия 12 на второй вход первого сумматора 1. Сигнал с четвертого выхода вычислительного блока 10 поступает на второй вход второго ключа 17, по которому второй ключ 17 отключает задатчик момента 16 от третьего входа первого сумматора 1. Поэтому силокомпенсирующий электропривод сбалансированного манипулятора переходит в исходное состояние балансировки веса передаточного устройства 4. После подключения к передаточному устройству 4 следующего объекта управления того же типа для выполнения манипулирования грузом необходимо последовательно нажать кнопки сброса 13 и пуска 18 силокомпенсирующего электропривода сбалансированного манипулятора.
При переходе к манипулированию объектом управления 5 другого типа необходимо задатчиком силы тяжести груза 8 установить новое значение сигнала среднего веса груза Рср.
Вычислительный блок 10 целесообразно реализовать на базе микроконтроллера, содержащего в качестве терминальных блоков таймер, двухканальный АЦП, одноканальный ЦАП и блоки ввода-вывода дискретных сигналов и работающего по программе, алгоритм которой приведен на фиг.2.
При пуске программы в блоке 1 выполняется первоначальная установка в нулевое состояние и вывод на соответствующие выходы вычислительного блока 10 сигнала включения автоматического режима работы ВАР (на первый выход вычислительного блока 10), сигнала индикации ручного режима работы ИРР (на второй выход вычислительного блока 10), сигнала компенсации К (через ЦАП на третий выход вычислительного блока 10) и сигнала включения ручного режима работы ВРР (на четвертый выход вычислительного блока 10). Затем блоками 2 и 3 осуществляется проверка нажатия кнопки сброса 13 и при его обнаружении переход на выполнение блоком 4 перевода силокомпенсирующего электропривода сбалансированного манипулятора в режим ручного управления с соответствующей его индикацией. С помощью блоков 5 и 6 организован анализ нажатия кнопки пуска 18, при обнаружении которого блоком 7 выполняется запуск таймера на определенный для выбранного темпа компенсации период управления, а блоком 8 ожидается окончание отработки таймером этого периода, после чего осуществляется переход к процессу компенсации силы тяжести груза. Процесс компенсации начинается блоком 9 с ввода через соответствующий второму входу вычислительного блока 10 канал АЦП текущего значения разностного сигнала ΔР. Этот сигнал проверяется блоком 10 на равенство нулю, и при отсутствии этого признака выполняется переход к проверке знака сигнала ΔР в блоке 11. При отрицательном значении сигнала ΔР блоком 12 выполняется увеличение сигнала компенсации K на единицу, при положительном знаке ΔР блоком 14 выполняется уменьшение сигнала компенсации К на единицу. После модификации сигнала компенсации K он с помощью ЦАП блоком 13 выводится на третий выход вычислительного блока 10 с последующим переходом программы к блоку 7 организации следующего цикла компенсации и с повторением цепочки блоков программы 7, 8, 9, 10, 11, 12 (14) и 13 до тех пор, пока блок 10 не обнаружит признака нулевого значения сигнала рассогласования ΔР. При этом осуществляется переход к блоку 15, который организует переход к автоматическому режиму работы силокомпенсирующего электропривода сбалансированного манипулятора с изменением состояния сигналов ВАР, ВРР и ИРР на противоположное. Затем выполняется переход к блокам 16 и 17, организующими ввод через канал АЦП, связанный с первым входом вычислительного блока 10 текущего значения сигнала усилия и проверку его по уровню, который при работе сбалансированного манипулятора с грузом не должен быть меньше минимального значения Pmin. При отсутствии груза (объекта манипулирования 5), когда Р>Pmin, блок 17 выполняет переход к блоку 1 начала программы, подготавливая тем самым сбалансированный манипулятор к работе со следующим грузом.
| название | год | авторы | номер документа |
|---|---|---|---|
| ФУНКЦИОНАЛЬНО-МОДЕЛИРУЮЩИЙ СТЕНД ДЛЯ СОЗДАНИЯ УСЛОВИЙ ИНТЕРАКТИВНОГО БЕЗОПОРНОГО ПРОСТРАНСТВА И ПОНИЖЕННОЙ ГРАВИТАЦИИ | 2012 |
|
RU2518478C2 |
| СИСТЕМА УПРАВЛЕНИЯ ВЕРТИКАЛЬНЫМ ПЕРЕМЕЩЕНИЕМ ОБУЧАЕМОГО НА ТРЕНАЖЕРЕ ВЫХОДА В КОСМОС | 2007 |
|
RU2355039C1 |
| ТРЕНАЖЕР ВНЕКОРАБЕЛЬНОЙ ДЕЯТЕЛЬНОСТИ КОСМОНАВТОВ | 2012 |
|
RU2506648C1 |
| Самонастраивающийся электропривод робота | 1990 |
|
SU1773714A1 |
| МНОГОФУНКЦИОНАЛЬНЫЙ УЧЕБНО-ТРЕНИРОВОЧНЫЙ КОМПЛЕКС ДЛЯ ПОДГОТОВКИ КОСМОНАВТОВ (АСТРОНАВТОВ) К ВНЕКОРАБЕЛЬНОЙ ДЕЯТЕЛЬНОСТИ (ВАРИАНТЫ) | 2013 |
|
RU2524503C1 |
| Устройство для управления приводом робота | 1990 |
|
SU1764990A1 |
| САМОНАСТРАИВАЮЩИЙСЯ ЭЛЕКТРОПРИВОД РОБОТА | 1990 |
|
RU2037173C1 |
| УСТРОЙСТВО ДЛЯ УПРАВЛЕНИЯ ПРИВОДОМ РОБОТА | 1992 |
|
RU2028931C1 |
| Устройство для управления приводом робота | 1990 |
|
SU1781027A1 |
| Устройство для управления приводом робота | 1989 |
|
SU1754438A1 |
Изобретение относится к автоматическому управлению и может быть использовано при создании силокомпенсирующих электроприводов сбалансированных манипуляторов и погрузочно-разгрузочных роботов. Техническим результатом является управление вертикальным перемещением груза сбалансированного манипулятора с компенсацией силы тяжести груза. Сущность изобретения состоит в том, что система управления осуществляет такое регулирование, при котором электродвигатель развивает усилие, равное силе тяжести груза и направленное так, что компенсирует ее. При таком регулировании манипулирование грузом осуществляется за счет приложенного оператором усилия. Силокомпенсирующий электропривод сбалансированного манипулятора содержит последовательно соединенные первый сумматор, регулирующий усилитель момента, электродвигатель, передаточное устройство (например, редуктор, пантограф и грузовой блок) и объект управления (груз), а также второй сумматор, дополнительно введены задатчик минимального момента, задатчик силы тяжести груза, последовательно соединенные датчик усилия, вычислительный блок и первый ключ, регулятор усилия, кнопка сброса, индикатор автоматического режима работы, индикатор ручного режима работы, последовательно соединенные задатчик момента и второй ключ. 2 ил.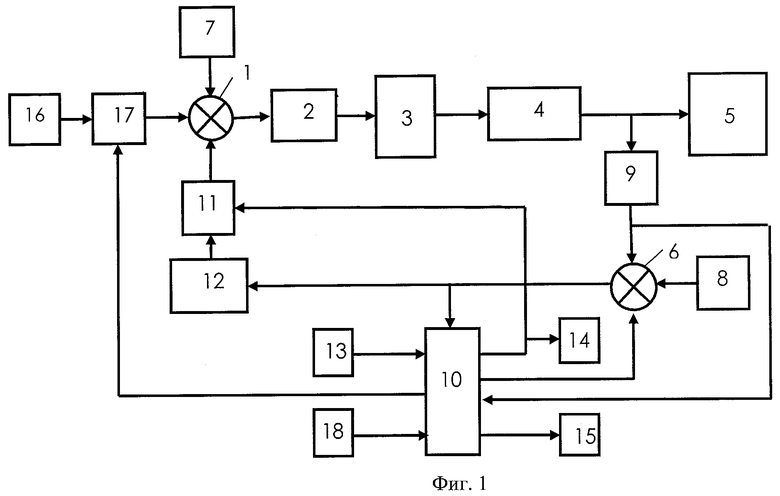
Силокомпенсирующий электропривод сбалансированного манипулятора, содержащий последовательно соединенные первый сумматор, отличающийся тем, что в него дополнительно введен задатчик минимального момента, регулирующий усилитель момента, электродвигатель, передаточное устройство и объект управления (груз), а также второй сумматор, задатчик силы тяжести груза, выход которого соединен с первым входом второго сумматора, последовательно соединенные датчик усилия, вычислительный блок, установленный с возможностью выделения сигнала автоматической компенсации изменения усилия, и первый ключ, выход которого соединен со вторым входом первого сумматора, регулятор усилия, выход которого соединен со вторым входом ключа, а вход связан с выходом второго сумматора и вторым входом вычислительного блока, кнопка сброса, выход которой соединен с третьим входом вычислительного блока, индикатор автоматического режима работы, подключенный к первому выходу вычислительного блока, индикатор ручного режима работы, подключенный ко второму выходу вычислительного блока, третий выход которого соединен со вторым входом второго сумматора, последовательно соединенные задатчик момента и второй ключ, выход которого соединен с третьим входом первого сумматора, кнопка пуска, выход которой соединен с четвертым входом вычислительного блока, вход датчика усилия подключен к выходу передаточного устройства, выход датчика усилия соединен с третьим входом второго сумматора, а второй вход второго ключа соединении с четвертым выходом вычислительного блока.
| САМОНАСТРАИВАЮЩИЙСЯ ЭЛЕКТРОПРИВОД | 2008 |
|
RU2397529C2 |
| Следящий электропривод | 1984 |
|
SU1275368A1 |
| DE 3306877 А1, 04.10.1984 | |||
| JP 2001225287 А, 21.08.2001. | |||

