(54) УСТРОЙСТВО ДЛЯ УПРАВЛЕНИЯ КОНВЕЙЕРНОЙ ЛИНИЕЙ

| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для управления запуском конвейерной линии | 1974 |
|
SU570525A1 |
| Устройство для управления работой перегрузочного пункта | 1986 |
|
SU1363138A1 |
| Устройство для погрузки сыпучих материалов в железнодорожные транспортные средства | 1978 |
|
SU768735A1 |
| Способ автоматического выбора маршрута рудничного поезда и устройство для его осуществления | 1979 |
|
SU870231A1 |
| Устройство для дозированной загрузки по массе вагонов сыпучим грузом | 1983 |
|
SU1137326A1 |
| Устройство для управления приводом конвейерной установки | 1984 |
|
SU1191391A1 |
| УСТРОЙСТВО для ИСКРОБЕЗОПАСНОГО УПРАВЛЕНИЯ КОНВЕЙЕРОМ РАЗВЕТВЛЕННОЙ КОНВЕЙЕРНОЙ ЛИНИИ | 1969 |
|
SU248038A1 |
| Способ автоматизированного управления рабочим процессом роторного экскаватора и система управления для его осуществления | 1985 |
|
SU1686078A1 |
| Устройство для управления загрузкой ленточного конвейера | 1983 |
|
SU1090644A1 |
| Устройство для управления системой конвейеров | 1976 |
|
SU591370A1 |
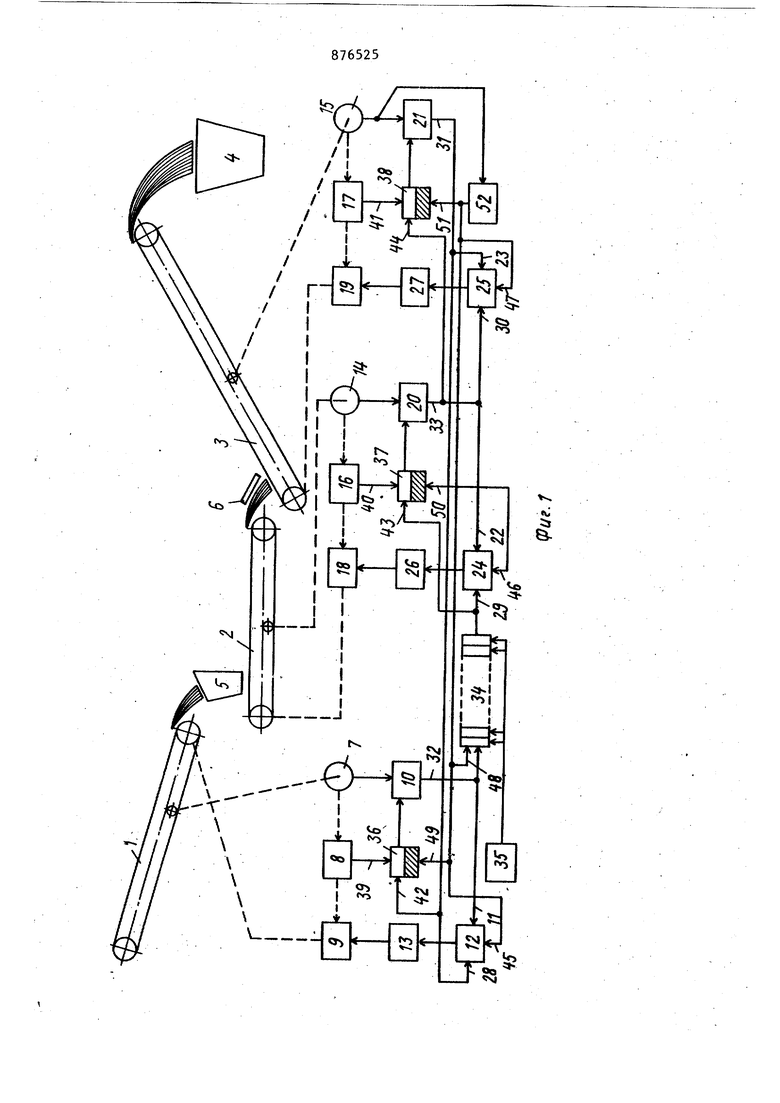
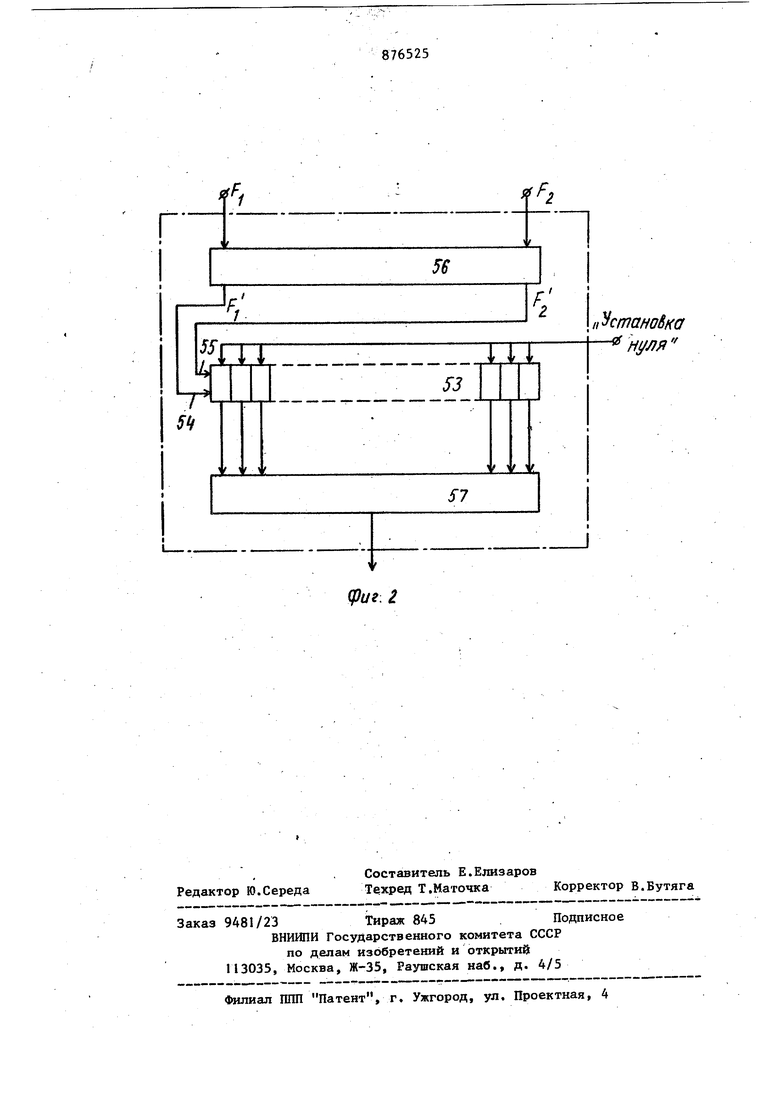
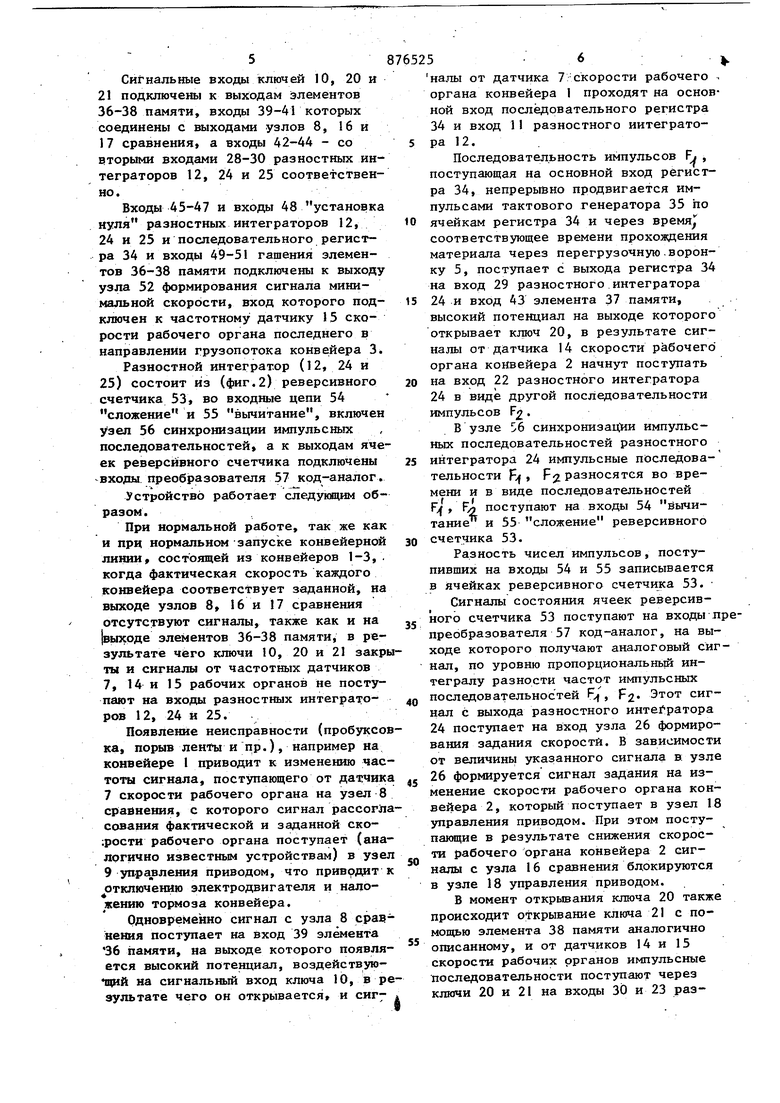
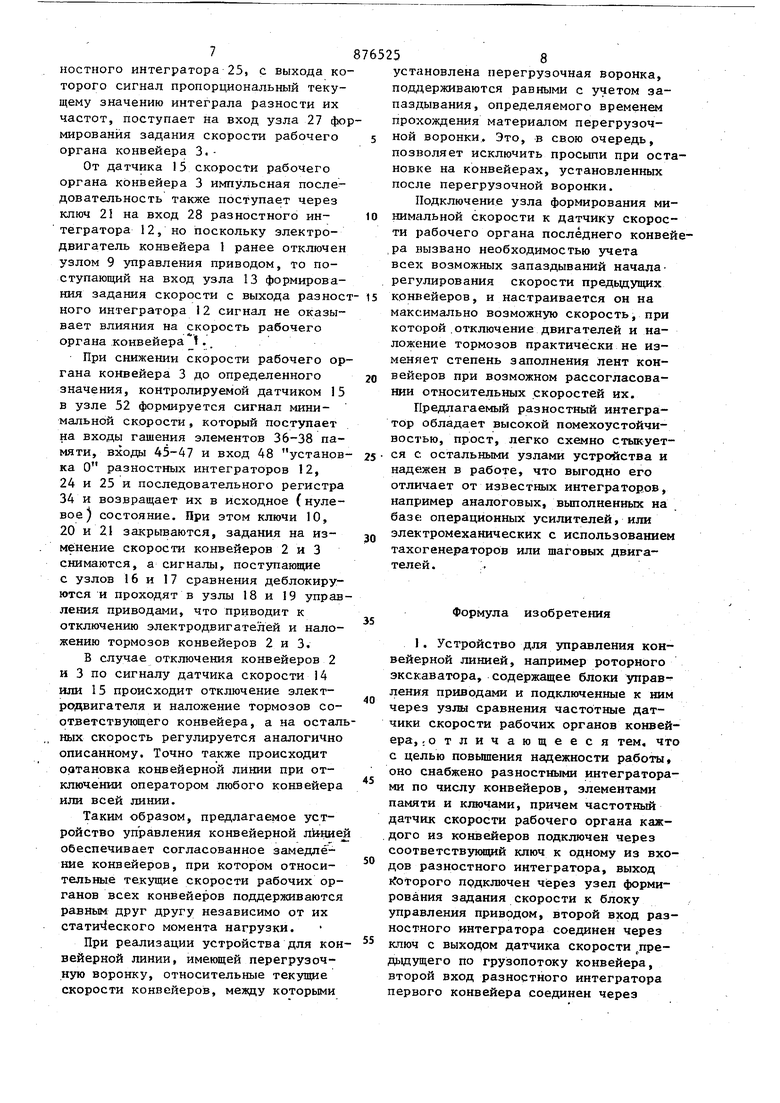
Устройство для управления конвейе ной линией относится к средствам управления экскаваторами, отвалообразователей и подобных им машин, а также к установкам непрерывного тран порта, оборудованных ленточными кон вейерами. Известны устройства управления конвейерной линией, содержащее блоки управления приводами, обеспечивающие при остановках конвейерной линии отключение от сети электродвигателя и наложение тормозов р j. Известны устройства управления конвейерной линией, содержащие блоки управления приводами и подключенные к ним через узлы сравнения частотные датчики скорости рабочих органов кон вейеров. Отключение пускового устройства любого конвейера вызывает отключение пускового устройства конвейера, производящего на него нагрузку, т.е. отключаются и затормаживаются все предьодущие по грузопотоку конвейера. Конвейера, расположенные после остановившегося конвейера, продолжают работать Ц2. Недостатком известных устройств явйяется то, что моменты приводов конвейеров в процессе остановки не регулируются и что отключение принимающего материал конвейера всегда производится раньше, чем отключается загружающий его конвейер. На конвейерных линиях, оборудованных перегрузочными воронками, также неизбежны переполнения лент, так как принимающие от них материал конвейера отключаются раньше, загружающих перегрузочные воронки конвейеров. Переполнение лент, кроме просыпей, вызывает ухудшение условий повторного пуска, а опорожнение связано с нарушением непрерывности транспортного потока, что в случае конвейерной линии, производящей непосредственную нагрузку в железнодорожные составы. 38 является причиной неравномерной загрузки вагонов при последующем запуске конвейерной линии. Все это снижает надежность работы конвейернойлинии. Указанные недостатки обусловили невозможность применения известных устройств для роторных экскаваторов, конвейерные линии которых оборудованы перегрузочными воронками, а отдель ные конвейера в процессе работы занимают различные углы в вертикальной плоскости. Цель Изобретения - повышение надежности работы конвейерной линии. Поставленная цель достигается тем что устройство снабжено разностными интеграторами по числу конвейеров, элементами памяти и ключами, причем частотный датчик скорости рабочего органа каждого из конвейеров подклю. чен через ключ соответствующий к одн му .входу разностного интегратора, вы ход которого подключен через узел формирования задания скорости к блоку управления приводом, второй вход раз ностного интегратора соединен через ключ с выходом датчика скорости пред дущего .по грузопотоку конвейера, вто рой вход разностного интегратора первого конвейера соединен через другой ключ с выходом частотного дат чика скорости рабочего органа послед него конвейера, в сигнальные входы ключей подсоединены к выходам элементов памяти, входы которых соедине ны с выходом узла сравнения и вторым входом разностного интегратора соответствующего конвейера. Для возможности применения устрой ства для конвейерной линии, оборудованной перегрузочными воронками, оно.снабжено последовательным регист ром и генератором тактовых импульсов причем выход частотного датчика скорости рабочего органа и второй вход разностного интегратора смежных конвейеров, между которыми установлена перегрузочная воронка, соединень через последовательный регистр, цепь продвигающих импульсов которого под ключена к генератору тактовых импуль сов. Для учета запаздывания начала регулирования скорости предыдущих конвейеров, устройство снабжено Узло формирования сигнала минимальной ско рости, вход которого подключен к час тотному датчику скорости рабочего органа последнего в направлении гру-,зопотока конвейера, а входы установка нуля разностных интеграторов, последовательного регистра и входы гашения элементов памяти подключены к выходу узла формирования сигнала минимальной скорости. В свою очередь разностный интегратор выполнен в виде узла синхронизации импульсных последовательностей, реверсивного счетчика импульсов и преобразователя код-аналог, причем входные цепи сложения и вычитания счетчика импульсов включены к блоку синхронизации импульсных последовательностей, а выходы реверсивного Счетчика подключены ко входу преобразователя код-аналог. На фиг. 1 приведена схема устройства; на фиг. 2 - схема разностного интегратора. Конвейерная линия, например роторного экскаватора, состоит из расположенных друг за другом конвейеров 1-3 (фиг.1), связанных общим транспортным потоком, поступающим в принимающий бункер 4. В местах перегрузки установлены перегрузочная воронка 5 и направляющий щит 6. Частотный датчик 7 скорости рабочего органа ( ленты) конвейера 1 подключен через узел 8 сравнения к блоку 9 управления приводом, как и в известных устройствах, и через ключ 10 ко входу 11 разностного интегратора 12, выход которого подключен через узел 13 формирования задания скорости к блоку 9 управления приводом. Соответственно датчики 14 и 15 скорости рабочих органов конвейеров 2 и 3 через узль 16 и 17 сравнения к блокам 18 и 19 управления приводами и через ключи 20 и 21 ко входам 22 к 23 разностных интеграторов 24 и 25J, выходы которого подключены через узлы 26 и 27 формирования задания скорости к блокам 18 и 19 управления приводами. Вторые входы 28-30 разностных интеграторов 12, 24 и 25 соединены соответственно с выходами 31-33 ключей 21, 10 и 20. Причем выход 32 ключа 10 конвейера: 1, после которого установлена перегрузочная воронка 5, соединен со входом 29 разностного нитегратора 24 конвейера 2 через последовательный регистр 34, цепь продвигающих импульсов которого подключена у генератору 35 тактовых импульсов. Сигнальные входы ключей 10, 20 и 21 подключены к выходам элементов 36-38 памяти, входы 39-41 которых соединены с выходами узлов 8, 16 и 17 сравнения, а входы 42-44 - со вторыми входами 28-30 разностных интеграторов 12, 24 и 25 соответственно. Входы 45-47 и входы 48 установка нуля разностных интеграторов 12, 24 и 25 и последовательного регистра 34 и входы 49-51 гашения элементов 36-38 памяти подключены к выходу узла 52 формирования сигнала минимальной скорости, вход которого подключен к частотному датчику 15 скорости рабочего органа последнего в направлении грузопотока конвейера 3. Разностной интегратор (12, 24 и 25) состоит из (фиг.2) реверсивного счетчика 53, во входные цепи 54 сложение и 55 вычитание, включен узел 56 синхронизации импульсных последовательностей а к выходам яче ек реверсивного счетчика подключены -входы преобразователя 57 код-аналог. Устройство работает следунядим образом. При нормальной работе, так же как и при нормальном запуске конвейерной линии у состоящей из конвейеров 1-3, . когда фактическая скорость каждого конвейера соответствует заданной, на выходе узлов 8, 16 и 17 сравнения отсутствуют сигналы, также как и на {выходе элементов 36-38 памяти, в результате чего ключи 10, 20 и 21 закр ты и сигналы от частотных датчиков 7, 14 и 15 рабочих органов не поступают на входы разностных интеграторов 12, 24 и 25. Появление неисправности (пробуксо ка, порыв ленты и пр.), например на конвейере 1 приводит к изменению час тоты сигнала, поступающего от датчик 7 скорости рабочего органа на узел 8 сравнения, с которого сигнал рассогла сования фактической и заданной ско:рости рабочего органа поступает (аналогично известным устройствам) в узел 9 управления приводом, что привр щт к этключению электродвигателя и наложению тормоза конвейера. Одновременно сигнал с узла 8 сравнения поступает на вход 39 элемента 36 памяти, на выходе которого появляется высокий потенциал, воздействующий на сигнальный вход ключа 10, в ре зультате чего он открывается и сиг7 5 6 налы от датчика 7 -скорости рабочего . органа конвейера 1 проходят на основной вход последовательного регистра 34 и вход 1I разностного иитегратора 12. Последовательность импульсов FJ, поступающая на основной вход регистра 34, непрерьюно продвигается импульсами тактового генератора 35 по ячейкам регистра 34 и через время соответствующее времени прохождения материала через перегрузочную.воронку 5, поступает с выхода регистра 34 на вход 29 разностного интегратора 24 и вход 43 элемента 37 памяти, высокий потенциал на выходе которого открывает ключ 20, в результате сигналы от датчика 14 скорости рабочего органа конвейера 2 начнут поступать на вход 22 разностного интегратора 24 в виде другой последовательности импульсов р2. В узле S6 синхронизации импульсных последовательностей разностного интегратора 24 импульсные последовательности F F разносятся во времени и в виде последовательностей F/J поступают на входы 54 вычитанке и 55 реверсивного счетчика 53. Разность чисел импульсов, поступивщих на входы 54 и 55 записывается в ячейках реверсивного счетчика 53. Сигналы состояния ячеек реверсивного счетчика 53 поступают на входы препреобразователя 57 код-аналог, на выходе которого получают аналоговый сигнал, по уровню пропорциональньй интегралу разности частот импульсных последовательностей F , р2« Этот сигнал с выхода разностного инте ратора 24 поступает на вход узла 26 формирования задания скорости. В зависимости от величины указанного сигнала в; узле 26 формируется сигнал задания на изменение скорости рабочего органа конвейера 2, который поступает в узел 18 управления приводом. При этом поступающие в результате снижения скорости рабочего органа конвейера 2 сигналы с узла 16 сравнения блокируются в узле 18 управления приводом. В момент открьшания ключа 20 также происходит открывание ключа 21 с помощью элемента 38 памяти аналогично описанному, и от датчиков 14 и 15 скорости рабочих органов импульсные последовательности поступают через ключи 20 и 21 на входы ЗО и 23 разпостного интегратора 25, с выхода которого сигнал пропорциональный текущему значению интеграла разности их частот, поступает на вход узла 27 формирования задания скорости рабочего органа конвейера 3.От датчика 15 скорости рабочего органа конвейера 3 импульсная последовательность также поступает через ключ 21 на вход 28 разностного интегратора 12, но поскольку электродвигатель конвейера 1 ранее отключен узлом 9 управления приводом, то поступающий на вход узла 13 формирования задания скорости с выхода разностного интегратора 12 сигнал не оказывает влияния на скорость рабочего органа конвейера t.
При снижении скорости рабочего органа конвейера 3 до определенного значения, контролируемой датчиком 15 в узле 52 формируется сигнал минимальной скорости, который поступает на входы гашения элементов 36-38 памяти, входы 45-47 и вход 48 установка О разностных интеграторов 12, 24 и 25 и последовательного регистра 34 и возвращает их в исходное (нулевое ) состояние. При этом ключи 10, 20 и 21 закрываются, задания на изменение скорости конвейеров 2 и 3 снимаются, а сигналы, поступающие с узлов 16 и 17 сравнения деблокируются и проходят в узлы 18 и 19 управления приводами, что приводит к отключению электродвигателей и наложению тормозов конвейеров 2 и 3.
В случае отключения конвейеров 2 и 3 по сигналу датчика скорости 14 или 15 происходит отключение электродвигателя и наложение тормозов соответствзпощего конвейера, а на остальных скорость регулируется аналогично описанному. Точно также происходит остановка конвейерной линии при отключении оператором любого конвейера или всей линии.
Таким образом, предлагаемое устройство управления конвейерной обеспечивает согласованное замедление конвейеров, при котором относительные текущие скорости рабочих органов всех конвейеров поддерживаются равным друг другу независимо от их статического момента нагрузки.
При реализации устройства для конвейерной линии, имеющей перегрузочную воронку, относительные текущие скорости конвейеро:в, между которыми
установлена перегрузочная воронка, поддерживаются равными с учетом запаздывания, определяемого временем прохождения материалом перегрузочной воронки. Это, в свою очередь,
позволяет исключить просыпи при остановке на конвейерах, установленных после перегрузочной воронки.
Подключение узла формирования мииимальной скорости к датчику скорости рабочего органа последнего конвейера вызвано необходимостью учета всех возможных запаздываний начала регулирования скорости предыдущих
конвейеров, и настраивается он на максимально возможную скорость, при которой.отключение двигателей и наложение тормозов практически не изменяет степень заполнения лент конвейеров при возможном рассогласовании относительных скоростей их.
Предлагаемый разностный интегратор обладает высокой помехоустойчивостью, прост, легко схемно стьжуется с. остальными узлами устройства и надежен в работе, что выгодно его отличает от известных интеграторов, например аналоговых, вьтолненных на базе операционных усилителей, или
электромеханических с использованием тахогенераторов или шаговых двигателей. .
Формула изобретения
другой ключ с выходом частотного датчика скорости рабочего органа последнего конвейера, а сигнальные входы ключей подсоединены к выходам элементов памяти, входы которых соединены с выходом узла сравнения и вторым входом разностного интегратора соответствуняцего конвейера,
и генератором тактовых импульсов, причем выход частотного датчика скорости рабочего органа через ключ и второй вход разностного интегратора смежных конвейеров, между которыми установлена перегрузочная воронка, соединень между собой через последовательный регистр, цепь продвигающих импульсов которого подключена к генератору тактовых импульсов.
Источники информации, принятые во внимание при экспертизе
iQ/Ч /J
Y
f
I , .
II
-«-J
N
I J
I o
I
I
JL.
J
«M
i:
IK,
:s &.
JVI
я
o
N i
vj
s
«Nl
Г
7 f/
V f
постановка
- HI/ЛЯ
S3
V V
(риг. 2
