Изобретение относится к машиностроению, в частности к приводам, например, сверлильных станков. Известны приводы станков, содержа щйе кинематическую цепь главного дви жения с несамотормозящейся винтовой передачей для разгрузки механизма по дачи, винт которой жестко связан со итинделем 1. Недостатком известных приводов является то, что без смены винта нелйзя изменить соотношение разгружа ющих осевых сил. Цель изобретения - расширение области использования. Для достижения поставленной цели привод снабжен дифференциальным меха низмом, звеном настройки и дополнительной кинематической цепью, параллельной основной, конечное звено которой жестко установлено на винте Лричем ведомые элементы дифференциала соединены с обеими цепями и в од ной из них установлено звено настрой ки. На. чертеже изображена схема приво да станка. Привод содержит станину 1, пиноль 2, ишиндель 3, инструмент 4,. винт 5 П - ;стерни 6 и 7, звенья 8 и 9 нас ройки, дифференциал 10, электродгигатель 11, реечную передачу 12 13, звено 14 настройки и электродвигатель 15. В отверстии корпуса станины 1 установлена пиноль 2. В пиноли 2 ус тановлен шпиндель 3, соединенный с винтом 5. В шпинделе 3 закреплен инструмент, обрабатывающий деталь 16 В кинематической цепи главного движе ния установлен дифференциальный глеханизм 10. Ведомые элементы дифференциального механизма соединены с параллельными кинематшгескими цепями, содержащими звенья настройки 8 и 9 , выполненными например, в форме сменных колес. Конечными -звеньями параллельных кинематических цепей является гайка, связанная с шестерней 7, соединенная с винтом 5, и шестерня б, соединенная шпонкой с винтом 5. Кинематическая цепь подачи содержит электродвигатель 15, звено настройки 14 и реечную передачу 13-12, связанную с пинолью. В процессе работы привода от электродвигателя 11 через дифференциальный механизм 10, параллельные кинематические цепи, звенья 8 и 9 настройки и кинематические пары шестерен б и 7 получает вращение шпиндель 3 с инструментом 4. Одновременно от электродвигателя 15 через звено настройки 14 и реечную передачу получает движение подачу пиноль 2 привода станка. В процессе обработки составляющие, сил резания д. ;р и РХ нагружают шп21ндель. При передаче крутящего момента в винтовой передаче 7-5 возникает осевая сила Р, которая направлена противоположно сост вляющей РХ и частично или полностью раз1ружают от нее механизм подачи. Так как при передаче крутящего момента чечереэ кинематическую пару 6-5 осевой силы не возникает, то перераспр еделение мощности,передаваемой параллельными кинематическими цепями, вызывает изменение осевой силы Р при определенном значении Р. Перераспределение мощности между указанными кинематичесикими цепями осуществляется изменением передаточного отношения одного из звеньев 8 или 9 настройки. Применение предлагаемого привода станка позволяет изменять величину разгружающей силы и, следовательно, расширяет область возможного применения .
ПРИВОД СТАНКА, содержащий кинематическую цепь главного движения с несамотормозящейся винтовой передачей для разгрузки механизма подачи, винт которой жестко связан со шпинделем, отличающийся агем, что, с целью расширения области использбёания, привод снабжен дифференциальным механизмом, звеном настройки и дополнительной кинематической цепью, параллельной основной, конечное звено которой жестко установлено на винте, причем ведомые элементы дифференциала соединены с обеими цепями и в одной из них установлено насчзройки.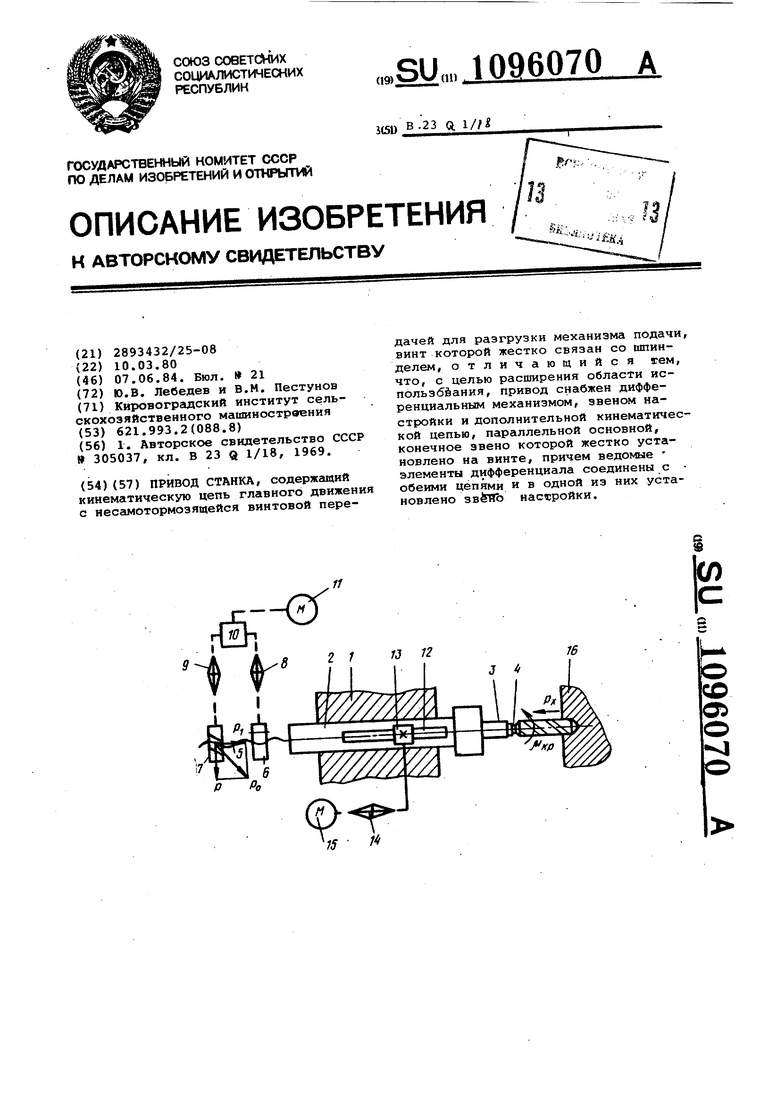
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| ШПИНДЕЛЬНЫЙ УЗЕЛ МЕТ.\ЛЛОРЕЖУЩЕГО СТАНКА | 0 |
|
SU305037A1 |
| Прибор для равномерного смешения зерна и одновременного отбирания нескольких одинаковых по объему проб | 1921 |
|
SU23A1 |
