Изобретение относится к станкостроению, в частности к станкам для финишной обработки.
Цель изобретения - упрощение конструкции привода.
На фиг.1 изображена кинематическая схема предлагаемого привода станка; на фиг.2 - электрическая схема управления.
Привод содержит корпус 1, пиноль 2, гайку 3, муфты 4 и 5, тормоз 6, рейку 7, реечное колесо 8, винт 9, гайку 10, шпиндель 11, шарниры 12 и 13, хонинговальную головку 14, воздействующую на заготовку 15, стол 16, электродвигатель 17, задающее устройство 18, распределительное устройство 19, усилители 20и 21, распределительное устройство 22, катушку 23 тормоза б и катушки 24 и 25 муфт 4 и 5.
Все узлы и механизмы привода расположены в корпусе 1. Здесь же на цилиндрических направляющих поступательного движения установлена пиноль 2. В последней на подшипниках установлен шпиндель 11, который через поочередно включаемые муфты соединен с пинолью. На линоли нарезана рейка 7, с которой находится в зацеплении реечное колесо 8, связанное с тормозом 6, Обрабатываемую заготовку 15 закрепляют на столе станка. Гайка 10 установлена на шпинделе 11 и соединена с якорем муфты 5, установленной на пиноли 2.
Задающее устройство 18 соединено с распределительным устройством 19, которое через усилители 20 и 21 соединено с распределительным устройством 22 и катушкой 23, а также с катушками 24 и 25 муфт 4 и 5.
Привод работает следующим образом.
При включении электродвигателя 17 вращение получают винт 9, шпиндель 11 и инструмент 14. Одновременно вращаются гайки 3 и 10. При включении катушки 24 муфта 4 замыкается, гайка 3 соединяется с пинолью, и последняя при открытом тормозе 6 вместе со шпинделем 11 и инструментом 14 перемещается вниз. В нижней точке путевая автоматика (не показана) переключает катушки 24 и 25, включается муфта 5, и
левая винтовая передача гайка 10 - винт 9 возвращает пиноль 2 со шпинделем 11 и инструментом 14 в исходное положение. Затем цикл обработки повторяется до окончания процесса. В исходном положении выключаются муфты 24 и 25 и включается тормоз 6. Для изменения скорости вращения инструмента установлен регулируемый двигатель 17. Изменение скорости поступательного движения инструмента 14 достигается системой управления инверсно включенных катушек 23 и одной из катушек 24 или 25. Задающее устройство 18 вырабатывает сигналы питания катушек 23-25 прямоугольной формы, изменяя скважность которых, получают необходимую скорость поступательного движения.
Сочетание основных элементов обеспечивает получение качественно нового свойства привода, которое состоит в том, что простыми-средствами обеспечивается регулирование сплошного движения формообразования в широком диапазоне, охватывающем потребность практики.
Формула изобретения Привод хонинговального станка, содержащий электродвигатель, связанный посредством кинематических цепей
вращательного и поступательного движения со шпинделем инструмента, и механизм управления, отличающийся тем, что, с целью упрощения конструкции, он снабжен размещенной концентрично шпинделю
пинолью, -установленной с возможностью вращения, а кинематические цепи вращательного и поступательного движения выполнены в виде двух соосно расположенных и противоположно направленных несамотормозящихся винтовых передач с общим винтом, связанным с электродвигателем, и двух электромагнитных муфт, посредством которых гайки указанных винтовых передач связаны с пинолью, причем последняя соединена с дополнительно.введенным в привод электромагнитным тормозом, который в механизм управления с указанной парой муфт включен инверсно.
20
V
21
| название | год | авторы | номер документа |
|---|---|---|---|
| Исполнительный орган технологического ротора | 1986 |
|
SU1349967A1 |
| Силовая головка | 1989 |
|
SU1742035A1 |
| Привод,например,хонинговальногоСТАНКА | 1971 |
|
SU795871A1 |
| Резьбонарезная силовая головка | 1982 |
|
SU1047647A1 |
| Станок для намотки обмоток электрических катушек | 1980 |
|
SU1023418A1 |
| Токарный станок | 1978 |
|
SU994118A2 |
| Автомат для изготовления электрических катушек | 1977 |
|
SU728175A1 |
| Зубодолбежный станок | 1987 |
|
SU1569118A1 |
| ПРИВОД УПРАВЛЕНИЯ ЯДЕРНЫМ РЕАКТОРОМ | 2014 |
|
RU2563890C2 |
| Способ зачистки осевых каналов роторов турбин и устройство для его осуществления | 1990 |
|
SU1784448A1 |
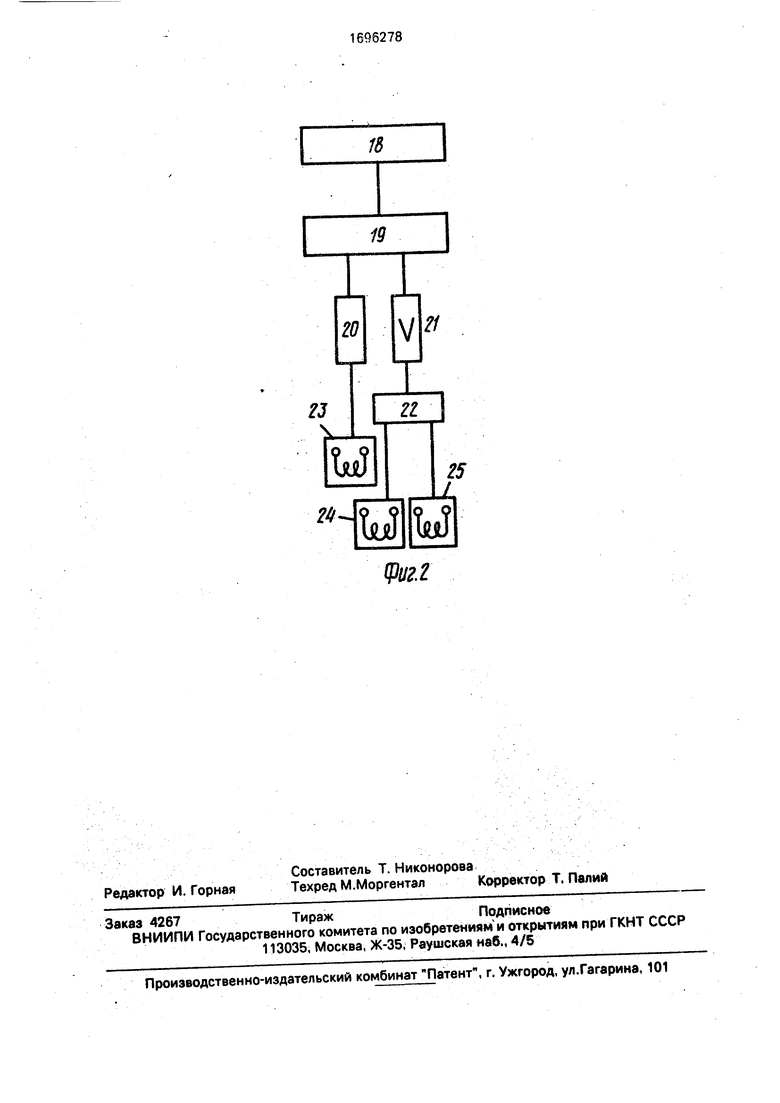
Изобретение относится к машиностроению и позволяет упростить конструкцию привода. Для этого привод хонинговального станка, содержащий электродвигатель, связанный посредством кинематических цепей вращательного и поступательного движения со шпинделем 11 инструмента, и механизм управления, снабжен размещенной концентрично шпинделю пинолью 2, установленной с возможностью вращения. Кинематические цепи вращательного и , поступательного движения выполнены в виде двух соосно расположенных и противоположно направленных несамотормозящихся винтовых передач с общим винтом 9, связанным с электродвигателем 17, и двух электромагнитных муфт 4 и 5, посредством которых гайки 3 и 10 указанных винтовых передач связаны с пинолью 2 Причем последняя соединена с дополнительно введенным в привод электромагнитным тормозом 6, который в механизм управления с указанной парой муфт 4 и 5 включен инверсно. 2 ил. 17 W Ё о ю о ю VI 00 Ј
23
2421
Фиг
| Куликова С.И | |||
| и др | |||
| Прогрессивные методы хонингования | |||
| - М.: Машиностроение, 1983, с | |||
| Прибор для массовой выработки лекал | 1921 |
|
SU118A1 |
