1 . Изобретение относится к устройствам для строительства и ремонта желе нодорожного пути, в частности к системам управления рабочими органами для уплотнения балласта железнодорож ного пути непрерывного действия. Известна система управления рабочим органом для уплотнения балласта железнодорожного пути, содержащая гидроцилиндр прижатия уплотнительных поверхностей рабочего органа к балла ту, связанныйс .блоком управленияу включающим датчик давления, подключенный к рабочей полости гидроцилинд ра, задатчик давления, усилитель и гидрораспределитель, выход которого подключен к гидроцилиндру прижатияС Однако известная система не обеспечивает эффективного управления про цессом уплотнения балласта железнодорожного пути при изменении скорост перемещения рабочего органа и как следствие не обеспечивает равномерно го уплотнения балласта. Как показьшает опыт эксплуатации рабочих органов непрерывного действи скорость их перемещения в процессе работы приходится менять ввиду различных условий уплотнения балласта. Цель изобретения - повьшение эффективности системы управления рабочим органом для уплотнения балласта железнодорожного пути путем регулирования изменений напора балласта на рабочий орган при изменений скорости его движения. Поставленная цель достигается тем, что система управления рабочим органом для уплотнения балласта железнодорожного пути5 содержащая ,гидро ц1шиндр -Прижатия уплотнительных поверхностей- рабочего органа к балласту, связанный с блоком управления включающим в себя датчик давления, подключенный к рабочей полости указанного гидроцилиндра, задатчик давления и гидрораспределитель, выход которого подключен к гидроцилиндру прижатия, снабжена элементом сравнения, датчиком скорости рабочего орга на, мерным катком, нелинейным корpeктиpyюIци элементом и сумматором, при этом датчик скорости рабочего органа соединен с одним из входов сумматора, второй вход которого соединен с задатчиком давления, а выход - с: э.пе -тентом сравнения, причем датчик длплеиия подключен к элементу сранприия, Быход которого через уси324 2 литель соединен с входом гидрораспределителя. На чертеже изображена принципиальная схема системы управления рабочим органом для уплотнения балласта железнодорожного пути. Объектом воздействия является рабочий орган 1 для уплотнения балласта железнодорожного пути, содержаксий корпус с встроенным вибровозбудителем и уплотнительными клиньями 2 и i3, имеющими соответственно уплотни- ; тельные поверхности 4 и 5, расположенные под углами к оси ремонтируемого пути, например клин 2 расположен под углом 0. Рабочий орган подвешен через упругие элементы 6 и 7 на продольной балке 8. Задний конец балки через шарнир 9 соединен с возможностью поворота в плане с промежуточным звеном 10, Последнее через шарнир 11 установлено на несущей конструк1,ии 12 путевой машинь. Передний конец балки 8 через шарнир 13 также установлен на несущей конструкции путевой машины. Между несущей конструкцией 12 и промежуточным звеном 10 шарнирно установлен гидроцилиндр 14 прижатия уплотнительньк клиньев 2 и 3 рабочего органа к балластному слою. Гидроцилиндр 14 является исполнительным бочим органом системы управления рабочим органом, Система управления также содержит задатчик 15 давления, соеднненньй с сумматором 16, Выход последнего соединен с элементом 17 сравнения, к второму входу которого подключен датчик 18 давления, вход .которого соединен с рабочей полостью гидроцилиндра 14. Выход элемента 17 сравнения соединен с входом усилителя 19 выход которого соединен с гидрораспределителем 20, подключенным к гидроцилиндру 14. Мерный каток 21s контактирлтощий с рельсовой нитью 22 уплотняемого пу-ти, соединен с датчиком 23 скорости движения машины, а датчик 23 через нелинейный корректирующий элемент 24 - с сумматором 16 (корректирующий элемент представляет собой нелинейный, усилитель), При работе путевой машины гидроцилиндром 14 производится поворот в горизонтальной плоскости продольной балки 8 вместе с подвегаенньгм на ней рабочим органом 1 вокруг шарниров 9 и 13, и соответствеитю, изменяется 3 угол атаки уплотнительной поверхности 4 к оси ремонтируемого пути. Такой поворот позволяет регулировать степень виброобжатия балластного сло в подшпальной зоне (соответственно, степень его уплотнения) в зависимости от текущих условий уплотнения. При неизменной скорости движения машины за счет поддержания постоянного давления жидкости в рабочей полости гидроцилиндра и, соответственно, пос тоянного давления уплотнительных по;Верхностей клиньев на балластный слой обеспечивается равномерное уплотнение балласта вдоль пути. При движении путевой машины вдоль фронта работ силовая компенсация изменений скоростного напора балласта на уплотнительные клинья рабочего органа вследствие изменений скорости движения путевой машины осуществляет ся следующим образом. Перед началом работы оператор при помощи задатчика 15 давления, выполненного, например, в виде потен циометра, устанавливает требуемое начальное давление в рабочей полости гидроцилиндра 14. Сигнал, пропорциональный задаваемому давлению,, поступает на вход сумматора 16. При движе НИИ машины датчик 23 скорости вырабатывает сигнал, пропорциональный угловой скорости вращения мерного катка 21, катящегося по рельсовой ни ти 22 пути, соответственно, пропорциональный скорости движения машины Этот сигнал поступает в нелинейный корректирующий элемент 24, с выхода которого сигнал подается к второму входу сумиатора 16. Вследствие нелинейности передаточной характеристи ки корректирующего элемента 24 уровень этого сигнала не обязательно ли нейно зависит от скорости движения машины (не обязательно пропорционален скорости), а изменяется по зависимости, определяемой видом балласта требованиями технологии, конструктив ными особенностями рабочего органа и т.д. Влияние вида балласта, требований технолгии и т.д. на сигнал, поступаю щий, с выхода корректирующего элемента 24, отражается путем перенастройки, переключения или смены корректи- 55
рующего элемента 24 на другой, реализу щий другую функциональную зависимость между сигналом, поступающим
заданной степенью плотности балластм и дополнительным скоростным напорог балласта на рабочий орган. 24 с выхода датчика 23 скорости, и сигналом, поступающим с выхода корректирующего элемента 24 на сумматор 16. Вид отмеченной функциональной зависимости, в общем случае нелинейной, определяется условиями работы (вид балласта, технология и т.д.). Таким образом, благодаря нелинейности характеристики корректирующего элемента 24, несмотря на то, что сигнал от датчика 23 линейно связан со скоростью движения рабочего органа (пропорционален скорости), сигнал, поступающий на вход сумматора 16, от корректирующего элемента 24 нелиней--, но (непропорционально) зависит от скорости движения машины. Нелинейный характер данной зависимости отражает тот факт, что результат уплотнения, например достигнутая плотность щебня в балластном слое, зависит нелинейно от скорости движения рабочего -органа. Сигнал, вьфабатываемый задатчиком 15 давления, и сигнал, поступающий от элемента 24, складываются в сумматор 16, на выходе которого образуется управляющий сигнал, пропорциональный сумме этик сигналов. Управляющий сигнал поступает на элемент 17 сравнения, на который поступает также сигнал от датчика 18 давления, пропорциональный давлению масла в рабочей полости гидроцилиндра 14. Если управляющий сигнал и сигнал от датчика 18 не равны между собой, например в случае изменения скорости движения мащины, и, соответственно, скоростного напора балласта на рабочий орган 1, на выходе элемента 17 сравнения появляется сигнал рассогласования, поступающий на вход усилителя 19, на выходе которого появляется сигнал управления гидрораспределителем 20. Через гидрораспределитель 20 начинает подаваться жидкость в рабочую полость гидроцилиндра 14. Гидроцилиндр поворачивает в горизонтальной плоскости продольную балку 8 с рабочим органом 1 до тех пор, пока давление на рабочих поверхностях 4 и 5 клиньев 2 не создаст в рабочей полости гидрощ-шиндра 14 давление, эквивалентнсП управляющему сигналу, определяемому Давление в рабочей полости гидроцилиндра 14 увеличивается с увеличен ем скорости движения машины, так как при этом увеличивается сигнал от элемента 24 и для уравновешивания си налов от сумматора 16 и датчика 18 на элементе 17 сравнения требуется большое значение давления. С умен шением скорости движения машины давление уменьшается соответственно. Таким образом, система управления рабочим органом для уплотнения балласта железнодорожного пути позволяет поддерживать заданную степень уплотнения балласта путем поддержания угла атаки ot, соответственно текущим условиям уплотнения, с силовой компенсацией возникающих изменений .ско1)остного напора балласта на рабочий орган при изменении скорости движения машины. Использование системы управления рабочим органом позволяет повысить качество уплотнения балластного слоя железнодорожного пути. Повышение качества уплотнения ведет к повьшгению безопасности движения поездов по отремонтированному участку пути, а также к снижению уровня трудозатрат на дополнительные выправочно-подбивочные работы, производимые механизированным инструментом с привлечением значительного количества трудовых ресурсов. Поэтому предлагаемая система управления рабочим органом для уплотнения балласта более эффективна, чем «звестная,
| название | год | авторы | номер документа |
|---|---|---|---|
| Рабочий орган для уплотнения балласта железнодорожного пути | 1980 |
|
SU956687A1 |
| Устройство регулирования пропорционального давления подбоек путевой машины | 2023 |
|
RU2820198C1 |
| Рабочий орган для уплотнения балласта железнодорожного пути | 1983 |
|
SU1114716A1 |
| Устройство для уплотнения откосной и междупутной зон балластной призмы | 1981 |
|
SU1008328A1 |
| ГИДРОСИСТЕМА УПРАВЛЕНИЯ РАБОЧИМИ ОРГАНАМИ ШПАЛОПОДБИВОЧНОГО УСТРОЙСТВА | 1991 |
|
RU2020196C1 |
| ГИДРОСИСТЕМА УПРАВЛЕНИЯ ШПАЛОПОДБИВОЧНЫМ РАБОЧИМ ОРГАНОМ | 1996 |
|
RU2088719C1 |
| Рабочий орган для уплотнения балласта железнодорожного пути | 1982 |
|
SU1025773A1 |
| Гидросистема управления рабочими органами шпалоподбивочного устройства | 1990 |
|
SU1761844A1 |
| Устройство для вырезки балласта железнодорожного пути | 1988 |
|
SU1576609A1 |
| Щебнеочистительная машина | 2024 |
|
RU2839787C1 |
СИСТЕМА ЗТ1РАВЛЕНИЯ РАБОЧИМ ОРГАНОМ ДЛЯ УПЛОТНЕНИЯ БАЛЛАСТА ЖЕЛЕЗНОДОРОЖНОГО ПУТИ, содержащая гидроцилиндр прижатия уплотнительных по верхностей рабочего органа к балласfff - - 7 ту, связанный с блоком управления, включающим в себя датчик давления, подключенный к рабочей полости указанного гидроцилиндра, задатчик давления, усилитель и гидрораспределитель, выход которого подключен гидроцилиндру прижатия, отличаю.щ а я с я тем, что, с целью повышения ее эффективности путем регулирования изменений напора балласта на рабочий орган при изменении скорости его движения, она снабжена элементом сравнения, датчиком скорости рабочего органа, мерным катком, нелинейным корректирующим элементом и сумматором, при этом датчик.скорости рабочего органа соединен с одним из входов сумматора, второй вход которого соединен с задатчиком давления, а выход - с элементом сравнения, причем датчик давления подключен к элементу сравнения, выход которого через усилитель соединен с входом ri-щрораспределителя. yjuaj pW LHJ /frrh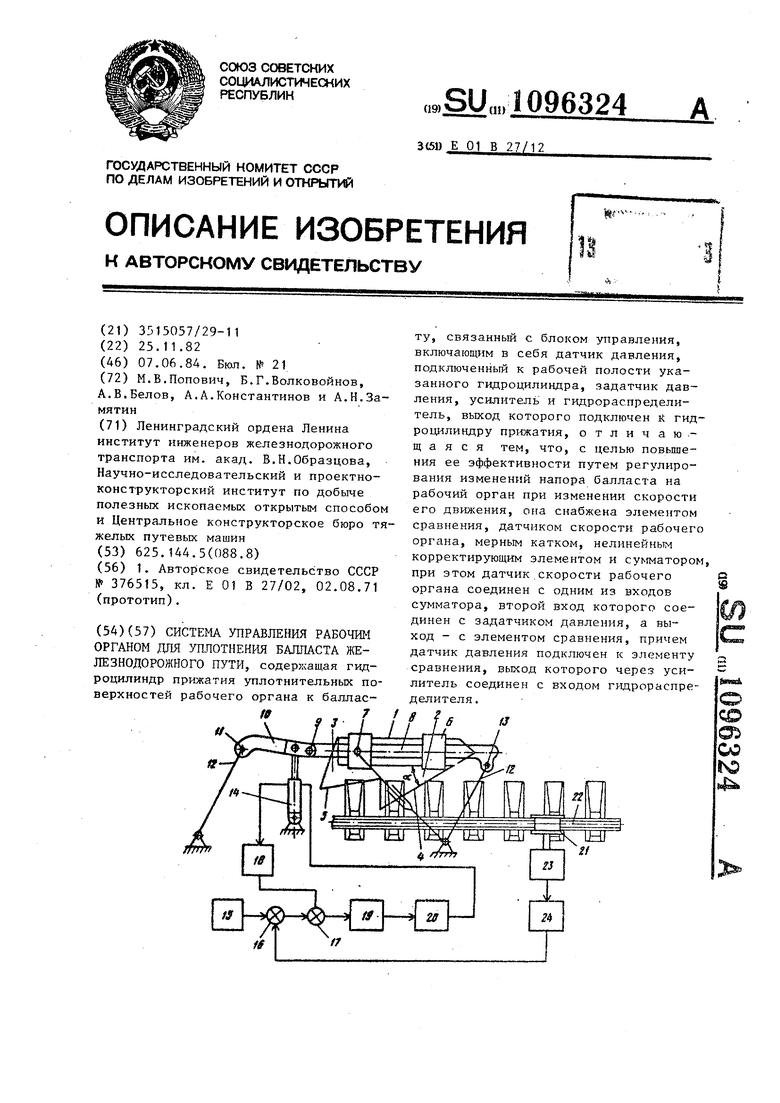
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| СИСТЕМА УПРАВЛЕНИЯ РАБОЧИМ ОРГАНОМ ПУТЕВОЙ МАШИНЫ ДЛЯ УПЛОТНЕНИЯ БАЛЛАСТА | 0 |
|
SU376515A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
