Изобретение относится к области железнодорожного транспорта, в частности, для управления процессом уплотнения и стабилизации материала балластного слоя рельсошпальной решетки с использованием путевых машин циклического и непрерывно-циклического действия.
В настоящее время на путевых выправочно-подбивочно-рихтовочных машинах широко используется известный из уровня науки и техники метод уплотнения и стабилизации материала балластного слоя рельсошпальной решетки за счет его горизонтального виброобжатия со стороны продольных кромок шпал лопатками подбоек. При этом последовательно выполняются операции заглубления подбоек, обжатия балласта при сведении к шпале их лопаток, раскрытия подбоек, подъема над уровнем верха головки рельса и перемещения для обработки следующей шпалы или группы шпал рельсошпальной решетки.
Система управления путевой выправочно-подбивочно-рихтовочной машины позволяет регулировать скорость подачи лопаток подбоек и тем самым настроить режим взаимодействия подбоек и балласта, соответствующий условиям уплотнения. При этом усилие обжима материала балластного слоя регулируется соответствующим редукционным клапаном с использованием электронного регулятора, реализующего принцип пропорционального управления [см. Путевые машины: Учебник для вузов железнодорожного транспорта / М.В. Попович, В.М. Бугаенко, Б.Г. Волковойнов и др. Под ред. М.В. Поповича, В.М. Бугаенко. - Москва: Желдориздат, 2007. 756 с.].
Существующий принцип пропорционального управления процессом уплотнения и стабилизации материала балластного слоя рельсошпальной решетки широко используются в различных машинах и устройствах для уплотнения материалов балластного слоя рельсошпальной решетки.
Так, известны машина и способ для стабилизации рельсового пути [патент на изобретение RU 2 788 406 C1, E01B 27/20(2006.01), B06B 1/16(2006.01), опубл. 19.01.2023]. В машине для стабилизации рельсового пути для управления стабилизационными агрегатами используются соответствующие исполнительные механизмы с электроприводом. Пропорциональное управление данными исполнительными механизмами обеспечивается общим цифровым устройством управления. Устройство управления предназначено для обработки данных, получаемых от измерительной системы машины для стабилизации рельсового пути, а также для определения установочных параметров для работы и управления стабилизационными агрегатами.
Также известна машина для подбивки и стабилизации железнодорожного пути [патент на изобретение RU 2 399 713 C1, E01B 27/17(2006.01), E01B 27/16(2006.01), E01B 27/20(2006.01), опубл. 20.09.2010]. Система управления стабилизирующим агрегатом данной машины для подбивки и стабилизации железнодорожного пути, установленным на подвижной каретке, включает следующие элементы: набор датчиков скорости перемещения машины, набор датчиков скорости перемещения стабилизирующего агрегата, гидроцилиндр перемещения подвижной каретки, привод динамического воздействия на рельсовый путь и цифровую систему управления движением стабилизирующего агрегата.
При изменении скорости движения машины или при ее остановке сигнал от датчиков скорости перемещения машины передается в систему управления движением стабилизирующего агрегата, которая, управляемая своими датчиками скорости перемещения стабилизирующего агрегата, при помощи гидроцилиндра перемещения подвижной каретки, производит компенсационное перемещение подвижной каретки со стабилизирующим агрегатом с заданной скоростью и выключение привода динамического воздействия на рельсовый путь в конце перемещения стабилизирующего агрегата.
Известно устройство для уплотнения щебеночного основания рельсового пути [патент на изобретение RU 2 602 871 C2, E01B 27/20(2006.01), опубл. 20.11.2016]. Управление виброцилиндром данного устройства осуществляется с помощью смонтированного на виброцилиндре клапана пропорционального регулирования, при этом устройством управления задаются желаемые значения амплитуды и частоты колебаний стабилизационного агрегата. Виброцилиндр также оснащен:
- датчиком измерения положения поршня виброцилиндра, позволяющим оценить сопротивление поперечному сдвигу стабилизационного агрегата данного устройства;
- датчиком измерения статического и динамического давления гидравлической жидкости в штоковой и поршневой полостях виброцилиндра, позволяющим оценить статическое или динамическое сопротивление поперечному сдвигу рельсового пути.
Амплитудная и фазовая синхронизации нескольких стабилизационных агрегатов, последовательно установленных в продольном направлении рельсового пути, реализуются с помощью контуров регулирования посредством цифрового устройства управления.
Общим недостатком данных машин и устройств является то, что они не обеспечивают регулирование пропорционального давления горизонтального виброобжатия балластного слоя подбивочными блоками, размещенными на правой и левой стороне рабочего органа путевой машины или устройства уплотнения.
Наиболее близким по технической сущности к заявляемому устройству является устройство регулирования давления подбоек путевой машины EK-140V-02, входящее в состав системы управления рабочим органом путевой выправочно-подбивочно-рихтовочной машины Duomatic 09-32 CSM (производитель - Plasser & Theurer, Австрийская Республика) для уплотнения и стабилизации балластного слоя рельсошпальной решетки.
Известное устройство регулирования давления подбоек путевой машины обеспечивает регулирование давления горизонтального виоброобжатия балластного слоя в подшпальной зоне рельсошпальной решетки для одного подбивочного блока путевой машины и содержит источник электропитания, модуль усилителя входного сигнала, модуль генератора опорного сигнала, выходы которых связаны с входами модуля формирования управляющего сигнала, выход которого связан с входом модуля формирования управляющего сигнала приводов подбивочного блока, включающего последовательно соединенные усилитель-формирователь сигнала, детектор сигнала, выход которого соединен с входами первого силового ключа и второго силового ключа. Входы питания модуля усилителя входного сигнала, модуля генератора опорного сигнала, модуля формирователя управляющего сигнала, усилителя-формирователя сигнала и детектора сигнала связаны с выходами питания источника электропитания.
Недостатком данного устройства регулирования давления подбоек путевой машины также является то, что оно не обеспечивает регулирование пропорционального давления горизонтального виброобжатия балластного слоя подбивочными блоками, размещенными на правой и левой стороне рабочего органа путевой машины.
Техническим результатом заявленного изобретения является расширение функциональных возможностей устройства регулирования давления подбоек путевой машины, за счет обеспечения регулирования пропорционального давления горизонтального виброобжатия балластного слоя в подшпальной зоне рельсошпальной решетки подбивочными блоками, размещенными на правой и левой стороне рабочего органа путевой машины в соответствии с заданными условиями уплотнения и стабилизации балластного слоя, что способствует повышению качества уплотнения балластного слоя за счет обеспечения равномерности уплотнения вдоль и поперек рельсошпальной решетки.
Указанный технический результат достигается тем, что в устройстве регулирования пропорционального давления подбоек путевой машины, включающем источник электропитания, модуль усилителя входного сигнала, модуль генератора опорного сигнала, выходы которых связаны с входами модуля формирования управляющего сигнала, выход которого связан с входом модуля формирования управляющего сигнала приводов правого подбивочного блока, включающего последовательно соединенные усилитель-формирователь сигнала A, детектор сигнала A, выход которого соединен с входами силового ключа A1 и силового ключа A2, при этом выходы питания источника электропитания связаны с входами питания усилителя-формирователя сигнала A, детектора сигнала A, модуля усилителя входного сигнала, модуля генератора опорного сигнала и модуля формирователя управляющего сигнала новым является то, что дополнительно содержит модуль формирования управляющего сигнала приводов левого подбивочного блока, включающий последовательно соединенные усилитель-формирователь сигнала B, детектор сигнала B, выход которого соединен с входами силового ключа B1 и силового ключа B2, при этом выход модуля формирования управляющего сигнала соединен через общую точку с соответствующими входами усилителя-формирователя сигнала A и усилителя-формирователя сигнала B, выходы питания источника электропитания связаны с входами питания усилителя-формирователя сигнала B и детектора сигнала B.
Сущность предлагаемого технического решения показана на структурной схеме заявляемого устройства регулирования пропорционального давления подбоек путевой машины, представленной на фиг. 1.
Предлагаемое устройство регулирования пропорционального давления подбоек путевой машины включает модуль усилителя входного сигнала (1), модуль генератора опорного сигнала (2), модуль формирователя управляющего сигнала (3), модуль формирования управляющего сигнала приводов правого подбивочного блока (4), включающий усилитель-формирователь сигнала A (6), детектор сигнала A (7), силовой ключ A1 (8) и силовой ключ A2 (9), модуль формирования управляющего сигнала приводов левого подбивочного блока (5), включающий усилитель-формирователь сигнала B (10), детектор сигнала B (11), силовой ключ B1 (12) и силовой ключ B2 (13), источник электропитания (14).
Объектом регулирования заявляемого устройства является рабочий орган путевой машины для уплотнения и стабилизации балластного слоя рельсошпальной решетки, включающий следующие взаимосвязанные элементы, схематически представленные на фиг. 1:
- сервовентиль гидроцилиндров правого подбивочного блока (18);
- сервовентиль гидроцилиндров левого подбивочного блока (19);
- гидроцилиндры привода рычагов внутренних и наружных подбоек правого подбивочного блока (20);
- гидроцилиндры привода рычагов внутренних и наружных подбоек левого подбивочного блока (21);
- правый подбивочный блок (I) и левый подбивочный блок (II) путевой машины.
Элементы рабочего органа путевой машины для уплотнения и стабилизации балластного слоя рельсошпальной решетки не входят в состав заявляемого устройства регулирования пропорционального давления подбоек путевой машины и показаны на фиг. 1 с целью пояснения сущности предлагаемого технического решения.
Каждый из подбивочных блоков (I, II) путевой машины включает блоки наружных и внутренних подбоек, связанные посредством рычагов со штоками гидроцилиндров привода рычагов внутренних и наружных подбоек (20, 21) соответствующего подбивочного блока (I, II). Управление гидроцилиндрами привода рычагов внутренних и наружных подбоек правого и левого подбивочных блоков (I, II) осуществляется посредством соответствующих сервовентилей (18, 19).
Управление сервовентилями гидроцилиндров правого и левого подбивочных блоков (18, 19) осуществляется посредством соответствующих реверсивных коллекторных двигателей постоянного тока (16, 17). Каждый реверсивный коллекторный двигатель постоянного тока (16, 17) также включает дополнительный тахогенератор (на фиг. 1 не показан). Выходы дополнительных тахогенераторов реверсивных коллекторных двигателей постоянного тока (16, 17) связаны соответственно со вторым и первым входами контроллера гидравлической системы рабочего органа (15), осуществляющим общее управление подбивочными блоками (I, II) путевой машины. Контроллер гидравлической системы рабочего органа (15) путевой машины и реверсивные коллекторные двигатели постоянного тока (16, 17) не входят в состав заявляемого устройства регулирования пропорционального давления подбоек путевой машины и показаны на фиг. 1 с целью пояснения сущности предлагаемого технического решения.
Выходы модуля усилителя входного сигнала (1) и модуля генератора опорного сигнала (2) соединены соответственно с первым и вторым входами модуля формирования управляющего сигнала (3), выход которого через общую точку соединен со вторым входом усилителя-формирователя сигнала A (6) модуля формирования управляющего сигнала приводов правого подбивочного блока (4) и со вторым входом усилителя-формирователя сигнала B (10) модуля формирования управляющего сигнала приводов левого подбивочного блока (5).
Выход усилителя-формирователя сигнала A (6) модуля формирования управляющего сигнала приводов правого подбивочного блока (4) соединен с входом детектора сигнала A (7). Выход детектора сигнала A (7) через общую точку связан с входами силового ключа A1 (8) и силового ключа A2 (9), выходы которых соответственно связаны с входом A и входом B реверсивного коллекторного двигателя постоянного тока (16).
Выход усилителя-формирователя сигнала B (10) модуля формирования управляющего сигнала приводов левого подбивочного блока (5) соединен с входом детектора сигнала B (11). Выход детектора сигнала B (11) через общую точку связан с входами силового ключа B1 (12) и силового ключа B2 (13), выходы которых соответственно связаны с входом A и входом B реверсивного коллекторного двигателя постоянного тока (17).
Первый вход усилителя-формирователя сигнала B (10) модуля формирования управляющего сигнала приводов левого подбивочного блока (5), первый вход усилителя-формирователя сигнала A (6) модуля формирования управляющего сигнала приводов правого подбивочного блока (4) и вход модуля усилителя входного сигнала (1) соединены соответственно с первым, вторым и третьим выходами контроллера гидравлической системы рабочего органа (15) путевой машины.
Входы питания следующих компонентов заявляемого устройства связаны с выходами питания (+15 В, -15 В) источника электропитания (14):
• модуль усилителя входного сигнала (1) - входы питания +15 В, -15 В;
• модуль генератора опорного сигнала (2) - входы питания +15 В, -15 В;
• модуль формирователя управляющего сигнала (3) - входы питания +15 В, -15 В;
• усилитель-формирователь сигнала A (6) модуля формирования управляющего сигнала приводов правого подбивочного блока (4) - входы питания +15 В, -15 В;
• детектор сигнала A (7) модуля формирования управляющего сигнала приводов правого подбивочного блока (4) - входы питания +15 В, -15 В;
• усилитель-формирователь сигнала B (10) модуля формирования управляющего сигнала приводов левого подбивочного блока (5) - входы питания +15 В, -15 В;
• детектор сигнала B (11) модуля формирования управляющего сигнала приводов левого подбивочного блока (5) - входы питания +15 В, -15 В.
Предлагаемое устройство регулирования пропорционального давления подбоек путевой машины выполнено в форме сменного модуля в соответствии с конструктивом «Евромеханика» и требованиями ГОСТ Р МЭК 60297-3-101-2006.
Реализация компонентов заявляемого устройства выполнена с использованием пассивных электронных компонентов, дискретных полупроводниковых приборов и интегральных микросхем низкой степени интеграции и соответствует известным из уровня науки и техники принципам построения схем преобразования аналоговых сигналов на операционных усилителях [см. Волович Г.И. Схемотехника аналоговых и аналого-цифровых электронных устройств / Г.И. Волович. Москва: Издательский дом «Додэка-XXI», 2005. 528 с.] и построения вторичных источников электропитания [см. Гейтенко Е.Н. Источники вторичного электропитания. Схемотехника и расчет. Учебное пособие / Е.Н. Гейтенко. Москва: СОЛОН-ПРЕСС, 2008. 448 с.].
Модуль усилителя входного сигнала (1) реализован в форме схемотехнической комбинации пассивных электронных компонентов, дискретных полупроводниковых приборов, операционных усилителей в интегральном исполнении и представляет собой последовательно соединенные интегрирующую RC-цепочку и неинвертирующий усилитель сигнала на операционном усилителе с отрицательной обратной связью.
Модуль генератора опорного сигнала (2) реализован в форме схемотехнической комбинации пассивных электронных компонентов, дискретных полупроводниковых приборов, операционных усилителей в интегральном исполнении и представляет собой генератор синусоидальных колебаний на основе моста Вина на операционном усилителе с автоматической стабилизацией амплитуды формируемого опорного сигнала.
Модуль формирования управляющего сигнала (3) реализован в форме схемотехнической комбинации пассивных электронных компонентов, дискретных полупроводниковых приборов, операционных усилителей в интегральном исполнении и представляет собой инвертирующий усилитель-сумматор на операционном усилителе с настраиваемыми масштабными коэффициентами.
Усилитель-формирователь сигнала A (6) модуля формирования управляющего сигнала приводов правого подбивочного блока (4) и усилитель-формирователь сигнала B (10) модуля формирования управляющего сигнала приводов левого подбивочного блока (5) реализованы в форме схемотехнической комбинации пассивных электронных компонентов, дискретных полупроводниковых приборов, операционных усилителей в интегральном исполнении и представляют собой инвертирующий сумматор-интегратор на операционном усилителе.
Детектор сигнала A (7) модуля формирования управляющего сигнала приводов правого подбивочного блока (4) и детектор сигнала B (11) модуля формирования управляющего сигнала приводов левого подбивочного блока (5) реализованы в форме схемотехнической комбинации пассивных электронных компонентов, дискретных полупроводниковых приборов, операционных усилителей в интегральном исполнении и представляют собой амплитудный детектор сигнала на операционном усилителе.
Силовые ключи A1 (8), A2 (9), B1 (12) и B2 (13) реализованы на базе составных биполярных транзисторов по схеме Дарлингтона c дополнительными усилителями тока с отрицательной обратной связью.
Источник электропитания (14) реализован в форме двухполярного преобразователя постоянного напряжения 24 В бортовой сети путевой машины в интегральном исполнении со значениями выходных напряжений питания +15 В и -15 В.
Процесс функционирования предлагаемого устройства регулирования пропорционального давления подбоек путевой машины рассмотрим на примере задачи регулирования пропорционального давления горизонтального виброобжатия балластного слоя правым и левым подбивочными блоками путевой выправочно-подбивочно-рихтовочной машины Duomatic 09-32 CSM (производитель - Plasser & Theurer, Австрийская Республика, далее - путевая машина) в рабочем режиме.
При этом заявляемое устройство регулирования пропорционального давления подбоек путевой машины:
- посредством реверсивного коллекторного двигателя постоянного тока (16) обеспечивает непосредственное управление сервовентилем гидроцилиндров правого подбивочного блока (18) путевой машины;
- посредством реверсивного коллекторного двигателя постоянного тока (17) обеспечивает непосредственное управление сервовентилем гидроцилиндров левого подбивочного блока (19) путевой машины.
Входной управляющий сигнал на изменение давления горизонтального виброобжатия балластного слоя подбивочными блокоми путевой машины поступает от контроллера гидравлической системы рабочего органа (15) путевой машины на вход модуля усилителя входного сигнала (1). При этом параметры входного управляющего сигнала определяются предварительно заданным режимом уплотнения балластного слоя рельсошпальной решетки в соответствии с требуемыми значениями показателей качества уплотнения, определяемыми Правилами технической эксплуатации железных дорог Российской Федерации (утверждены приказом № 250 Министерства транспорта Российской Федерации от 23 июня 2022 г.). Модуль усилителя входного сигнала (1) выполняет интегрирование и усиление входного сигнала с последующей передачей преобразованного входного управляющего сигнала на первый вход модуля формирования управляющего сигнала (3).
Параллельно с преобразованием входного управляющего сигнала, модулем генератора опорного сигнала (2) формируется синусоидальный опорный сигнал, амплитуда и частота которого определяются параметрами настраиваемых элементов частотно-задающей цепи генератора синусоидальных колебаний на основе моста Вина. Полученный опорный сигнал передается на второй вход модуля формирования управляющего сигнала (3).
Формирование управляющего сигнала выполняется модулем формирования управляющего сигнала (3) путем суммирования преобразованного входного сигнала со входа 1 и опорного сигнала со входа 2 инвертирующим усилителем-сумматором, при этом масштабные коэффициенты суммирования определяются параметрами настраиваемых элементов входных цепей инвертирующего усилителя-сумматора. Полученный управляющий сигнал через общую точку передается на второй вход усилителя-формирователя сигнала A (6) модуля формирования управляющего сигнала приводов правого подбивочного блока (4) и на второй вход усилителя-формирователя сигнала B (10) модуля формирования управляющего сигнала приводов левого подбивочного блока (5).
На первый вход усилителя-формирователя сигнала A (6) модуля формирования управляющего сигнала приводов правого подбивочного блока (4) и на первый вход усилителя-формирователя сигнала B (10) модуля формирования управляющего сигнала приводов левого подбивочного блока (5) поступают соответственно:
- со второго выхода контроллера гидравлической системы рабочего органа (15) путевой машины - преобразованный сигнал обратной связи от дополнительного тахогенератора реверсивного коллекторного двигателя постоянного тока (16);
- с первого выхода контроллера гидравлической системы рабочего органа (15) путевой машины - преобразованный сигнал обратной связи от дополнительного тахогенератора реверсивного коллекторного двигателя постоянного тока (17).
Процесс функционирования модуля формирования управляющего сигнала приводов правого подбивочного блока (4) предполагает:
- с использованием усилителя-формирователя сигнала A (6) выполняется последовательное интегрирование, суммирование и усиление входного преобразованного сигнала обратной связи, соответствующего коллекторному двигателю постоянного тока (16) и управляющего сигнала, сформированного модулем формирования управляющего сигнала (3) с последующей передачей полученного сигнала на вход детектора сигнала A (7);
- с использованием детектора сигнала A (7) выполняется формирование управляющего сигнала приводов правого подбивочного блока путем амплитудного детектирования входного сигнала с последующей передачей управляющего сигнала через общую точку на входы силового ключа A1 (8) и силового ключа A2 (9).
Процесс функционирования модуля формирования управляющего сигнала приводов левого подбивочного блока (5) предполагает:
- с использованием усилителя-формирователя сигнала B (10) выполняется последовательное интегрирование, суммирование и усиление входного преобразованного сигнала обратной связи, соответствующего коллекторному двигателю постоянного тока (17) и управляющего сигнала, сформированного модулем формирования управляющего сигнала (3) с последующей передачей полученного сигнала на вход детектора сигнала B (11);
- с использованием детектора сигнала B (11) выполняется формирование управляющего сигнала приводов левого подбивочного блока путем амплитудного детектирования входного сигнала с последующей передачей управляющего сигнала через общую точку на входы силового ключа B1 (12) и силового ключа B2 (13).
Элементы модуля формирования управляющего сигнала приводов правого подбивочного блока (4) и модуля формирования управляющего сигнала приводов левого подбивочного блока (5) путевой машины совместно с контроллером гидравлической системы рабочего органа (15) путевой машины формируют контуры управления с отрицательной обратной связью соответствующими реверсивными коллекторными двигателями постоянного тока (16, 17) сервовентилей гидроцилиндров правого и левого подбивочных блоков (18, 19). Параллельное функционирование данных контуров управления при наличии общего источника управляющего сигнала, которым является цепочка, формируемая модулем усилителя входного сигнала (1), модулем генератора опорного сигнала (2) и модулем формирователя управляющего сигнала (3), обеспечивает регулирование пропорционального давления горизонтального виброобжатия балластного слоя в подшпальной зоне рельсошпальной решетки подбивочными блоками, размещенными на правой и левой стороне рабочего органа путевой машины.
Пары силовых ключей A1 (8) и A2 (9), B1 (12) и B2 (13) реализуют процесс управления реверсивными коллекторными двигателями (16, 17) сервовентелей гидроцилиндров правого (18) и левого (19) подбивочных блоков с использованием трехуровневой широтно-импульсной модуляции [см. Гольц М.Е. Автоматизированные электроприводы постоянного тока с широтно-импульсными преобразователями / М.Е. Гольц, А.Б. Гудзенко, В.М. Остреров, Л.А. Шпиглер. Москва: Энергия, 1972. 112 с.]. При этом управляющие сигналы с выходов силовых ключей A1 (8) и A2 (9) поступают на входы A и B реверсивного коллекторного двигателя постоянного тока (16) соответственно, сигналы с выходов силовых ключей B1 (12) и B2 (13) - на входы A и B реверсивного коллекторного двигателя постоянного тока (17).
Таким образом, предлагаемое устройство регулирования пропорционального давления подбоек путевой машины обеспечивает регулирование пропорционального давления горизонтального виброобжатия балластного слоя в подшпальной зоне рельсошпальной решетки, что способствует повышению качества уплотнения балластного слоя и росту эффективности использования путевых выправочно-подбивочно-рихтовочных машин в целом.
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство независимого управления питанием исполнительных механизмов вывешивания и подъема рельсошпальной решетки | 2024 |
|
RU2828213C1 |
| Устройство регулирования скорости путевой машины | 2023 |
|
RU2803807C1 |
| Устройство регистрации отклонения троса-хорды путевой машины | 2023 |
|
RU2814803C1 |
| Способ управления процессом уплотнения балластного слоя рельсового пути | 2021 |
|
RU2765725C1 |
| Устройство для испытаний шпалоподбивочного блока | 1983 |
|
SU1093939A1 |
| СПОСОБ ШИЛКИНА ДЛЯ УПЛОТНЕНИЯ БАЛЛАСТА РЕЛЬСОВОГО ПУТИ И МАШИНА ШИЛКИНА ДЛЯ ОСУЩЕСТВЛЕНИЯ СПОСОБА (ВАРИАНТЫ) | 2007 |
|
RU2342481C1 |
| ВЫСТУП ШПАЛЫ | 2017 |
|
RU2646703C1 |
| Способ уплотнения балласта железнодорожного пути | 2018 |
|
RU2676253C1 |
| УПЛОТНИТЕЛЬНО-ПОДБИВОЧНЫЙ АГРЕГАТ | 2008 |
|
RU2382133C1 |
| СПОСОБ КОРРЕКТИРОВКИ ПОЛОЖЕНИЯ РЕЛЬСОВОГО ПУТИ | 2013 |
|
RU2547108C1 |

Изобретение относится к области железнодорожного транспорта, в частности для управления процессом уплотнения и стабилизации материала балластного слоя рельсошпальной решетки с использованием путевых машин циклического и непрерывно-циклического действия. Технический результат заключается в расширении функциональных возможностей устройства регулирования давления подбоек путевой машины за счет обеспечения регулирования пропорционального давления горизонтального виброобжатия балластного слоя в подшпальной зоне рельсошпальной решетки подбивочными блоками, размещенными на правой и левой стороне рабочего органа путевой машины в соответствии с заданными условиями уплотнения и стабилизации балластного слоя, что способствует повышению качества уплотнения балластного слоя за счет обеспечения равномерности уплотнения вдоль и поперек рельсошпальной решетки. Указанный технический результат достигается тем, что устройство регулирования пропорционального давления подбоек путевой машины включает в себя модуль усилителя входного сигнала, модуль генератора опорного сигнала, модуль формирователя управляющего сигнала, модуль формирования управляющего сигнала приводов правого подбивочного блока, включающий усилитель-формирователь сигнала A, детектор сигнала A, силовой ключ A1 и силовой ключ A2, модуль формирования управляющего сигнала приводов левого подбивочного блока, включающий усилитель-формирователь сигнала B, детектор сигнала B, силовой ключ B1 и силовой ключ B2, источник электропитания. Предлагаемое устройство регулирования пропорционального давления подбоек путевой машины обеспечивает регулирование пропорционального давления горизонтального виброобжатия балластного слоя в подшпальной зоне рельсошпальной решетки, что способствует повышению качества уплотнения балластного слоя и росту эффективности использования путевых выправочно-подбивочно-рихтовочных машин в целом. 1 ил.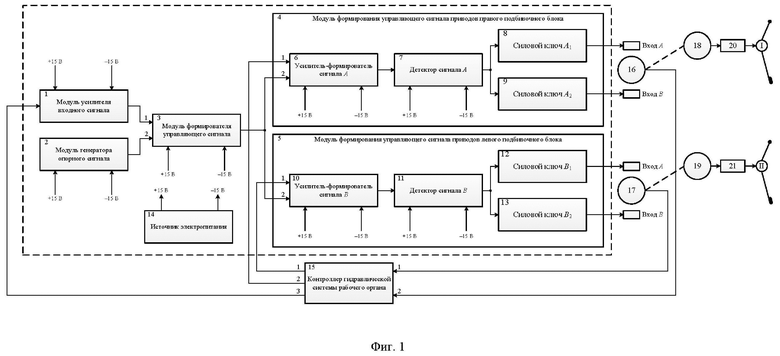
Устройство регулирования пропорционального давления подбоек путевой машины, включающее источник электропитания, модуль усилителя входного сигнала, модуль генератора опорного сигнала, выходы которых связаны с входами модуля формирования управляющего сигнала, выход которого связан с входом модуля формирования управляющего сигнала приводов правого подбивочного блока, включающего последовательно соединенные усилитель-формирователь сигнала A, детектор сигнала A, выход которого соединен с входами силового ключа A1 и силового ключа A2, при этом выходы питания источника электропитания связаны с входами питания усилителя-формирователя сигнала A, детектора сигнала A, модуля усилителя входного сигнала, модуля генератора опорного сигнала и модуля формирователя управляющего сигнала, отличающееся тем, что дополнительно содержит модуль формирования управляющего сигнала приводов левого подбивочного блока, включающий последовательно соединенные усилитель-формирователь сигнала B, детектор сигнала B, выход которого соединен с входами силового ключа B1 и силового ключа B2, при этом выход модуля формирования управляющего сигнала соединен через общую точку с соответствующими входами усилителя-формирователя сигнала A и усилителя-формирователя сигнала B, выходы питания источника электропитания связаны с входами питания усилителя-формирователя сигнала B и детектора сигнала B.
| ПРИБОР ДЛЯ ИСПЫТАНИЯ И ПРОВЕРКИ ЗРИТЕЛЬНЫХ ОЩУЩЕНИЙ | 1925 |
|
SU3767A1 |
| Система управления рабочим органом для уплотнения балласта железнодорожного пути | 1982 |
|
SU1096324A1 |
| US 9982396 B2, 29.05.2018 | |||
| Способ выправки железнодорожного пути и машина для его реализации | 1974 |
|
SU865137A3 |
| WO 2019120829 A1, 27.06.2019 | |||
| Шпалоподбивочная машина | 1974 |
|
SU728725A3 |

