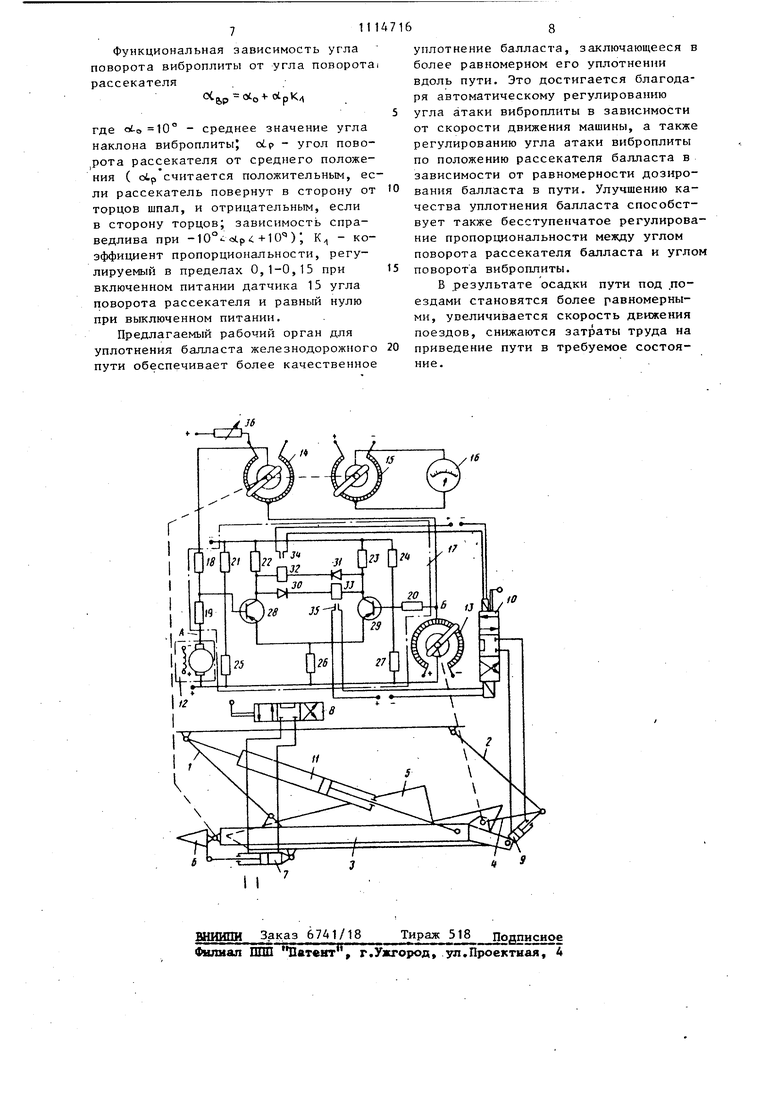
i1 Изобретение относится к устройст.вам для строительствй и ремонта желез нодорожного пути, в частности к рабочим органам для уплотнения балласта железнодорожного пути. Известен рабочий орган для уплотнения балласта железнодорожного пути, содержащий раму, виброплиту, содержащую уплотнительные клинья и установленную на раме посредством уп ругих элементов, рассека.тель балласта, шарнирно закрепленный на раме с возможностью поворота приводом в горизонтальной плоскости, гидроцилиндр поворота виброплиты в горизонтальной пло.скости и устройство корректирования положения виброплиты и рассекателя балласта, имеющее датчик угла поворота виброплиты,датчик угла повор та рассекателя и блок управления 1 Недостатком известного рабочего органа является низкое качество уплотнения балласта, проябляющееся при неравноплотном распределении бал ласта по длине пути. В результате путь под поездами осаживается неравномерно, что ведет к ограничению ско рости движения поездов и требует дополнительных затрат труда по приве дению пути в необходимое состояние. Цель изобретения - повышение ка.чества уплотнения балласта. Для достижения поставленной цели рабочий орган для уплотнения балласта железнодорожного пути, содержащий раму, виброплиту, содержащую уплотнительные клинья и установленную на раме посредством упругих элементов, рассекатель балласта, шарнирно закрепленный на раме с возможностью поворота приводом в горизонтальной плоскости, гидроцилиндр поворота виброплиты в горизонтальной плоскости и устройство корректирования положения виброплиты и рассекателя бал ласта, имеющее датчик угла поворота виброплиты, датчик угла поворота рас секателя и блок управления, снабжен датчиком скорости движения рабочего органа, которьй соединен с одним из входов блока управления, второй из входов которого соединен с датчиком угла поворота виброплиты, при этом оба входа блока управления соединены с датчиком угла поворота рассекателя, а оба его выхода - с указанньм гидроцилиндром поворота виброплиты. Кроме того, с целью расширения функциональных возможностей путем 6I регулирования соотношения углов поворота рассекателя и виброплиты датчик, угла поворота рассекателя соединен с источником электрического тока через переменное сопротивление. Причем указанный датчик скорости выполнен в виде тахогенератора. Датчики углов поворота рассекателя и виброплиты выполнены в виде потенциометров. Блок управления выполнен в виде дифференциального усилителя. На чертеже изображен рабочий орган для уплотнения балласта железнодорожного пути. Рабочий орган для уплотнения балласта железнодорожного пути содержит кронштейны 1 и 2 переднего и заднего механизмов подъема, раму 3, соединенную шарнирн-о с кронштейном 1 непосредственно, а с кронштейном 2 - через промежуточную балку 4, виброплиту 5, подвешенную к раме 3 снизу посредством упругих элементов, рассекатель 6 балласта, соединенный шаонионо с оамой 3, поивоп поворота рассекателя выполненный в виде гидроцилиндра 7, подключенного к гидросистеме через распределитель 8, а также привод поворота виброплиты 5, вьшолненный в виде гидроцилиндра 9, подключенного через распределитель 10. Рабочий орган также содержит механизм 11 выноса рамы 3, датчик 12 скорости движения рабочего органа, выполненный в виде тахогенератора и приводимый во вращение от колес машины, датчик 13 угла поворота виброштиты, выполненный в виде потенциометра и установленный в шарнире соединения рамы 3 с промежуточной балкой 4, датчики 14 и 15 угла поворота рассекателя, вьтолненные в виде потенциометров и установленные в шарнире соединения рассекателя 6 с рамой 3, указатель 16 угла поворота рассекателя 6. Посредством кронштейнов 1 и 2 механизмов подъёма рабочий орган монтируется на путевой машине. Датчик 12 скорости движения рабочего органа и датчик 14 угла рассекателя 6 соединены с входом А блока 17 управления, вьшолненного в виде дифференциального усилителя. Датчик 13 угла поворота виброплиты 5 соеди иен с входом Б блока 17, выходы которого соединены с катушками электро31магнитов распределителя 10, т.е. с приводом поворота виброплиты 5. Блок 17 управления выполнен по мостовой схеме и содержит согласующие сопротивления 18-20, сопротивления 21-27 (величины сопротивлений 21 и 24, 22 и 23; 25 и 27 попарно равны), транзисторы 28 и 29, диоды 30 и 31, реле 32 и 33, контакты 34 и 35. Датчики 12-15 и блок 17 управления образуют устройство корректирова ния положения виброплиты и рассекате ля балласта. Датчик 14 угла поворота рассекате ля 6 подсоединен к источнику постоянного тока через переменное электрическое сопротивление 36, Рабочий орган работает следующим образом. Рассекатель 6 с помощью распределителя 8 и гидроцилиндра 7 устанавли вается так, что его продольная ось параллельна продольной оси пути. Это положение рассекателя 6 является основным и соответствует наиболее часто встречающемуся случаю правильного дозирования балласта в путь. При движении машины с включенным при водом виброплиты 5 и включенным пита нием датчиков 12-14 и блока 17 напряжение от датчика 12 скорости поступает на вход -А блока 17 управления. Одновременно на вход Б блока 17 поступает напряжение с датчика 13 уг ла поворота виброплиты 5. При равенстве этих напряжений, что имеет место, если угол поворота виброплиты 5 находится в рациональном соответстви со скоростью движения машины, через транзисторы 28 и 29 текут равные токи, падения напряжения на сопротивлениях 22 и 23 одинаковы, токи через диоды 30 и 31 и катушки реле 32 и 33 отсутствуют, контакты 34 и 35 разомк нуты, на катушки электромагнитов распределителя 10 напряжение не пода ется, распределитель 10 находится в нейтральном положении, рабочая жидкость в полости гидроцилиндра 9 не подается, виброплита 5 занимает фиксированное положение. При увеличении скорости машины требуется уменьшение угла наклона уплотнительньк клиньев, в противном случае давление на балласт и его сдвиги в каждом полупериоде колебаний виброплиты возрастают настолько. 164 . что балласт выдавливается в шпальные ящики, а плотность его пйд шпалами уменьшается. При уменьшении скорости движения машины требуется увеличение угла наклона уплотнительных клиньев. При увеличении скорости движения машины напряжение, выдаваемое датчиком. 12 скорости, увеличивается и становится больше напряжения, вьдаваемого датчиком 13 угла поворота виброплиты 5. В этом случае сопротивление перехода транзистора 28 уменьшается, ток, проходящий через него, увеличивается, падение напряжения на сопротивлении 22 также увеличивается. Появляется разность падений напряжений на сопротивлениях 22 и 23, в результате через диод 30 и катушку реле 33 течет ток, срабатывает реле 33, замыкаются контак- ты 35, и распределитель 10 переводится в позицию, когда жидкость поступает б поршневую полость гидроци- линдра 9, что обеспечивает поворот виброплиты 5 в сторону уменьшения угла ее наклона к оси пути, т.е. уменьшения угла атаки. При таком повороте виброплиты 5 напряжение, вьщаваемое датчиком 13 на вход Б блока 17, увеличивается, сопротивление перехода транзистора 29 уменьшается, ток, проходящий через транзистор 29 и сопротивление 23, увеличивается, увеличивается падение напряжения на сопротивлении 23, а разность падений напряжений на сопротивлениях 22 и 23 уменьшается, уменьшается также ток через диод 30 и катушку реле 33. Поворот виброплиты 5 будет продолжаться до тех пор, пока ток через катушку реле 33 не станет равным порогу отключения реле 33. После этого размыкаются контакты 35 И распределитель 10 встает в нейт- , ральную позицию, поворот виброплиты.. 5 прекращается, угол ее наклона находится в рациональном соответствии со скоростью движения машины. При уменьшении скорости движения машины напряжение, вьщаваемое датчиком 12, становится меньше напряжения, вьдаваемого датчиком 13, при этом ток через транзистор 29 больше тока через транзистор 28, через диод 31 и катушку реле 32 течет ток, кон-такты 34 замыкаются, распределитель 10 переводится в позицию, когда жид5
кость поступает в штоковую полость гидроцилиндра 9, что ведет к повороту вчброплиты 5 в сторону увеличения угла ее наклона, т.е. увеличения угла . Поворот будет происходить до тех пор, пока электрические сигналы с датчиков 12 и 13 не станут равными. После этого контакты ЗА размыкаются, распределитель 10 становится в нейтральную позицию и виброплита фиксируется в положении, соответствующем рациональному сочетанию скорости движения машины и угла атаки виброплиты.
При необходимости зависимость угла поворота виброплиты 5 от скорости движения машины может быть исключена путём размыкания связи датчика 12 с колесом машины, т,е, путем перевода датчика 12 в транспортное положение,
В случае недостаточного дозирования балласта в пути распределитель 8 вручную переводится в позицию, обеспечивающую подачу жидкости в штоковую полость гидроцилиндра 7 и поворот рассекателя 6 вершиной от торцов шпал. При этом ротор датчика 14 поворачивается по часовой стрелке в положение, показанное на чертеже, потенциал на входе А блока 17 уменьшается а на входе Б увеличивается. Тогда через транзистор 29 пойдет ток,больший по величине, чём через транзистор 28, что вызовет появление тока через диод 31, замыкание контактов 34, перевод распределителя 10 в позицию, обеспечивающую подачу жидкости в штоковую полость гидроцилиндра 9, и поворот виброштиты 5 в сторону увеличения угла атаки. Одновременно при этом указатель 16 показывает величину угла и направление отклонения рассекателя 6 от его среднего положения. С поворотом вйброплиты 5 напряжение, вьщаваемое датчиком 14, уменьшается, уменьшается ток, текущий через транзистор 29, диод 30 и катушку реле 32. Виброплита 5 поворачивается до тех пор, пока ток чере диод 31 не станет меньше тока удержа ния реле 32, тогда контакты 34 размыкаются и поворот виброплиты 5 прекращается.
Регулирование соотношения углов поворота рассекателя 6 и виброплиты 5 производится с помощью переменного электрического сопротивления 36. . Если сопротивление 36 увеличивается.
11147
66
то ток питания датчика 15 уменьшается и при одном н том же угле поворота рассекателя 6 на входы блока 17 подается меньший сигнал, компенсация которого требует меньшего угла поворота виброплиты 5, Если сопротивление 36 уменьшается, то при одном и том же угле поворота рассекателя 6 угол поворота виброплиты увеличивается.
При необходимости зависимость угла поворота виброплиты 5 от угла поворота рассекателя 6 может быть исключена путем снятия напряжения питания с датчика 14 угла поворота рассекателя,
В общем случае устройство работает, осуществляя одновременно коррекции положения йиброплиты как в зависимости, от скорости движения машины, так и в зависимости от положения рассекателя 6,
В том случае, если дозирование балласта обеспечено полностью и равйомерно, то производится только корректирование положения виброплиты 5 в зависимости от скорости движения машины. При этом рассекатель 6 фиксируется с помощью распределителя В и гидроцилиндра 7 в среднем положении,
В том случае, если дозирование балласта выполнено неполно или неравномерно по длине пути, то производится корректирование положения виброплиты в зависимости от угла поворота рассекателя 6, При этом датчик 12 скорости движения рабочего органа Переводится в транспортное положение.
Функциональная зависимость угла поворота виброплиты от скорости движения машины может быть представлена в виде уравнения
o bo oto-CV-VoX,
где сС(7 10° - среднее значение угла наклона (при уплотнении асбестового балласта), V - фактическая скорость движения машины, м/с, зависимость справедлива при 0,3 VA. fcO,,9 м/с; Vo 0,6 м/с - средняя скорость движения машины, м/с; К коэффициент пропорциональности, величина которого для асбестового балласта равна 10 град с/м.
При скорости 0,9 м/с угол достигает 7,0, при скорости 0,3 м/с13,0.
| название | год | авторы | номер документа |
|---|---|---|---|
| Рабочий орган для уплотнения балласта железнодорожного пути | 1980 |
|
SU956687A1 |
| РАБОЧИЙ ОРГАН ШПАЛОПОДБИВОЧНОЙ МАШИНЫ | 1994 |
|
RU2054077C1 |
| Устройство для уплотнения балласта железнодорожного пути | 1980 |
|
SU931889A1 |
| ПОДВЕСКА ВИБРОПЛИТ ШПАЛОПОДБИВОЧНОЙ МАШИНЫ | 1992 |
|
RU2006543C1 |
| УКЛАДЧИК ДОРОЖНЫХ ПОКРЫТИЙ | 1996 |
|
RU2101415C1 |
| Шпалоподбивочная машина | 1974 |
|
SU728725A3 |
| УСТРОЙСТВО ДЛЯ УПЛОТНЕНИЯ БАЛЛАСТА ЖЕЛЕЗНОДОРОЖНОГО ПУТИ | 2001 |
|
RU2202670C1 |
| Шпалоподбивочная машина | 1980 |
|
SU965364A3 |
| Устройство для уплотнения балласта железнодорожного пути | 1986 |
|
SU1331931A1 |
| ЭЛЕКТРОПРИВОД УСТРОЙСТВА ТРАНСПОРТИРОВКИ | 1991 |
|
RU2063343C1 |
1. РАБОЧИЙ ОРГАН ДЛЯ УПЛОТНЕНИЯ БАЛЛАСТА ЖЕЛЕЗНОДОРОЖНОГО ПУТИ, содержащий раму, виброплиту, содержащую уплотнительные клинья и установленную на раме посредством упругих элементов, рассекатель балласта, шарнирно закрепленный на раме с возможностью поворота приводом в горизонтальной плоскости, гидроцилиндр поворота виброплиты в горизонтальной плоскости и устройство корректирования положения виброплиты и рассекателя балласта, имеющее патчик угла поворота виброплиты, датчик угла поворота рассекателя и блок управления, отличающийся тем, что, с целью повышения качества уплотнения балласта, он снабжен датчиком скорости движения рабочего органа, который соединен с одним из входов блока управления, второй из входов которого соединен с датчиком уг-. ла поворота виброплиты, при этом оба входа блока управления соединены с датчиком угла поворота рассекателя, а оба его выхода - с указанным гидроцилиндром поворота виброплиты. 2.Рабочий орган по п.1, отличающийся тем, что, с целью расширения его функциональных возможностей путем регулирования соотношения углов поворота рассекателя и виброплиты, датчик угла поворота рассекателя соединен с источником j электрического тока через переменное W сопротивление. 3.Рабочий орган поп.1, отли чающийся тем, что указанный датчик скорости выполнен в виде тахо- с генератора. 4.Рабочий орган по п.1, отличающийся тем, что датчики углов поворота рассекателя и виброплиты вьшолнены в виде потенциометров. ч 5. Рабочий орган по п.1, о т л и чающийся тем, что блок управОЬ ления выполнен в виде дифференциального усилителя.
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Рабочий орган для уплотнения балласта железнодорожного пути | 1980 |
|
SU956687A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
