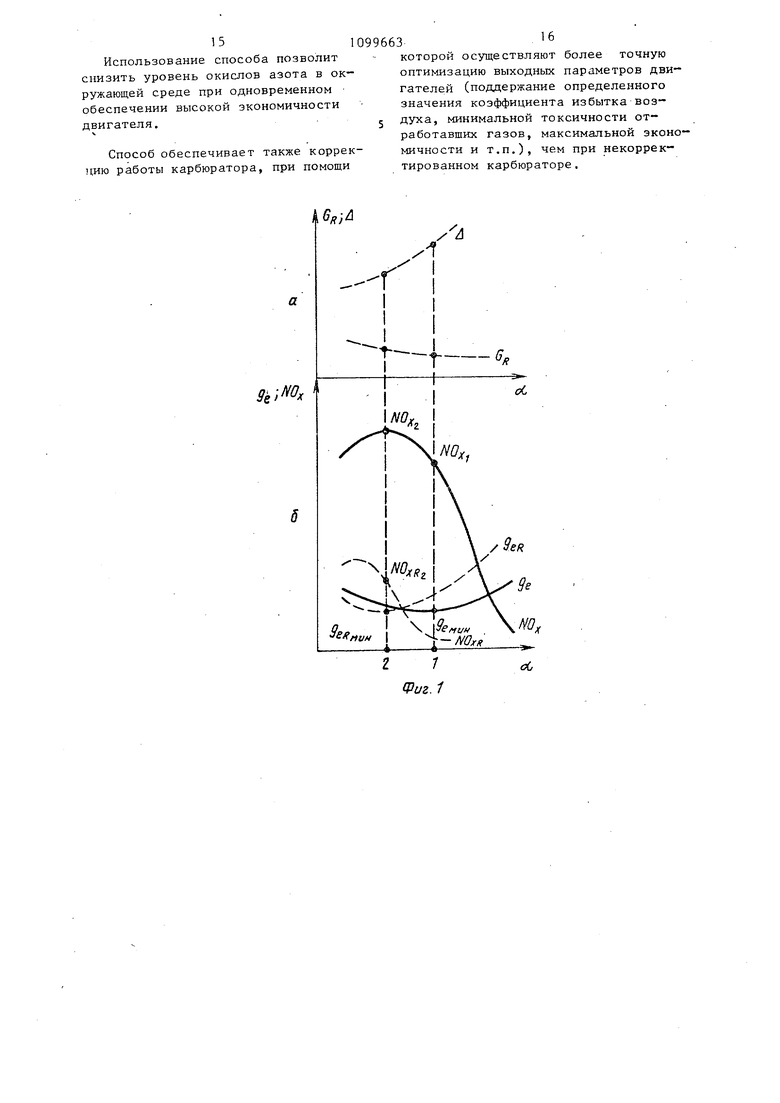
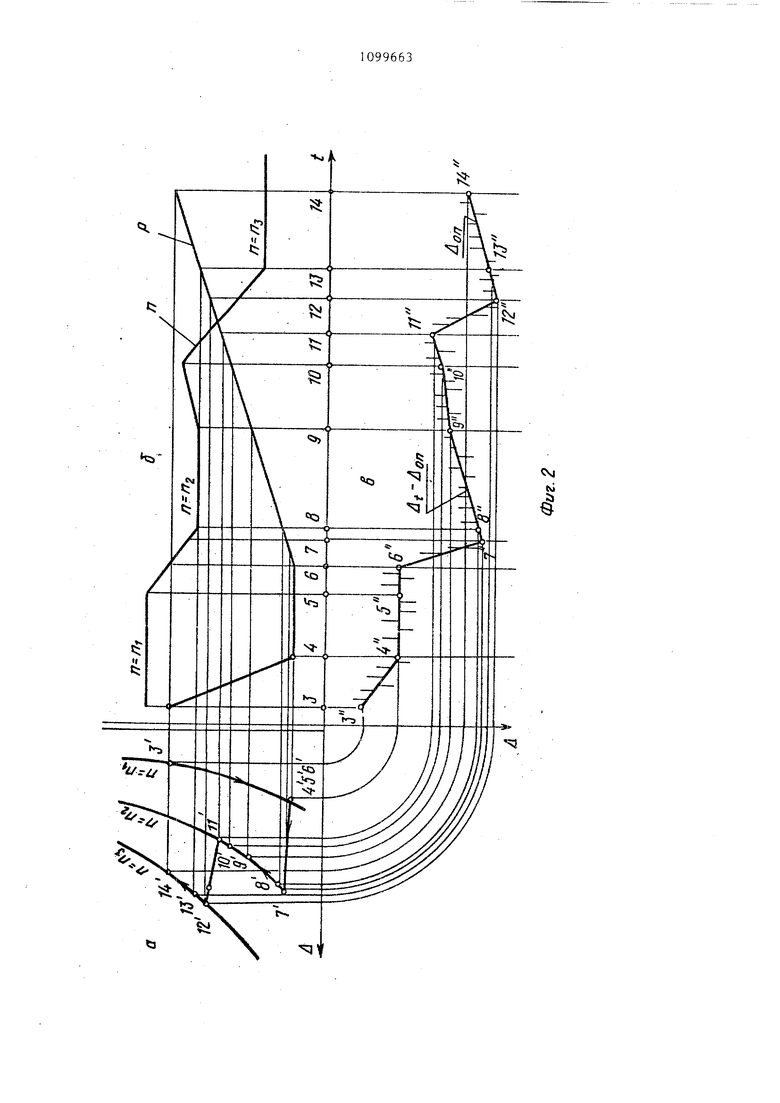
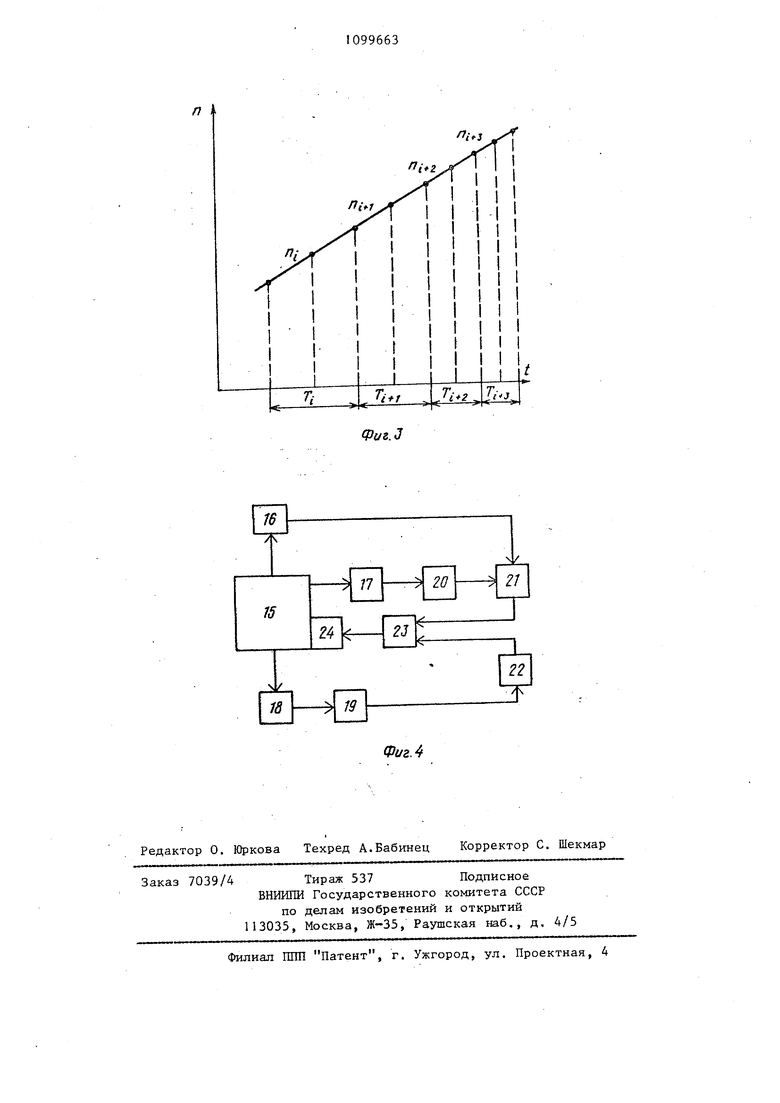
Изобретение касается автоматичес™ кого регулирования двигателей внутреннего сгорания. Известны способы онределения нестабильности вращения двигателя внутреннего сгорания путем измерения продолжительности каждого рабочего цикла двигателя и вычисления текущего значения нестабильности вращения коленчатого вала, как разности величин периода вращения, определяемых в течение двух соседних рабочих циклов , Известны также способы определения нестабильности вращения двигате- . ля внутреннего сгорания путем измер НИН каждого периода вращения коленч того -вала, получения первой и второй разностей между двумя парами периодов, выч1-1сления текущего значе НИН нестабильности путем вычитания одной разности из другой. Однако известными способами нельзя производить регулирование двига телей на неустановившихся скоростных режимах при оптимизации различных . выходных параметров. Например, при описании способу регулирования двигателя внутреннего сгорания, в котором использован указанный способ оп- ределения нестабильности, показана лишь одна область его применения - ограничение обеднения смеси введением опорного уровня нестабильности в виде предельно допустимого порога нестабильности. Оптимизация других выходных параметров неустановившихся скоростных режимах не представляется возможной. Это обьясняетея тем, что регулярные измерения частоты вращения вала на неустановившихся скоростных режимах создают помехи, на фоне которых нестабильность не всегда может быть выявлена. В наиболее типичном случае равноускоренного разгона двигате ля помехи от регулярных изменений частоты вращения коленчатого вала могут оказаться соизмеримыми с полезным сигналом и даже могут его превьщзать. Кроме того, принятая мера нестабильности получена из условия суммирования воздействия неравномерности давления газов в цидиндрах по каждому периоду вращения. Это приводит к тому, что неисправ ность одного из цилиндров может вызвать ложный сигнал нестабильности значительной величины. Еслл исходить из суммирования давления газов не по каждому периоду а по интервалам времени, равным продолжительности рабочих циклов двигателя, то при неисправности одного, из цилиндров ложный сигнал нестабильности будет меньше, чем в рассматриваемом случае. Цель изобретения - расширение области применения способа путем распространения его на все скоростные режимы двигателя при оптимизации различных выходных параметров и повьпие- ние точности. Для достижения поставленной цели в способе определения нестабильности вращения двигателя внутреннего сгорания путем измерения каждого периода вращения коленчатого вала, получения первой и второй разностей мелзду двумя парами периодов, вычисления текущего значения нестабильности за временной интервал путем вычитания одной разности из другой, за временной интервал принимают время, равное продолжительности рабочего цикла двигателя, причем для определения разностей между двумя парами периодов периода чередуют, текущее значение нестабильности вращения определяют по первой разности между периодами Т и Т;, и второй разности между периодами и Т 2 орректируют пер,вую разность y ffloжeния на величину 0,6(1; .Т а вторую разность на величину . Т.,5( где Т - период; i - номер i-ro периода, и определяют приведенное текущее значение нестабильности путем деления текущего значе11ия нестабильности, вычисленного путем вычитания одной корректируемой разности из другой, на произведение трех последовательных периодов Т 5 Т и Т. В качестве текущих значений нестабильности можно использовать модуль полученных при их определении величин. При необходимости полученные текущие значения нестабильности усредняют по результатам не;скольких вычислений. На фиг. 1 приведена зависимость нестабильности Л и количества рецир- кулируемых отработавших газов Gjj от коэффициента избытка воздуха oi график а), зависимости удельного расхода топлива gg при отсутствии рециркуляции отработавших газов, удельного расхода топлива g, при рециркуляции отработавших газов, уровня окислов азота N0j( в отработавших газах при отсутствии рециркуляции и уровня окислов азота рецирку ляции отработавших газов от коэффициента избытка воздуха oi (график б) гдеЫО,,.1Ю„. N0,2 еем«н ёеяминхарактерные точки кривых. На фиг. 2 изображены в общем виде зависимости нестабильности U от нагрузки Р график а), изменения частоты вращения п и нагрузки Р во времени t (график б), изменение опорного уровня нестабильности Д on и разности между текущим значением и опорным уровнем нестабильности Д.-й(,„ во времени t (гра:фик в). На фиг. 3 показано линейное во времени возрастание частоты вра1цения п коленчатого вала (равноускоренный разгон) и ее приращение во времени t. На фиг. 4 приведена функциональная схема системы регулирования. Способ реализуется при регулировании двигателя внутреннего сгорания осуществляемого для оптимизации одно го из выходных параметров. Оптимизируемыми выходными парамет рами могут являться, например относи тельный уровень удельного расхода топлива (экономичность), относительный уровень токсичности отработавших газов (уменьшение уровня), относительный уровень максимальной мощност величина коэффициента избытка воздуха оС . I Уровни оптимизации названы относи тельными потому, что их абсолютная величина меняется с изменением частоты вращения вала п и нагрузки Р. В качестве регулируемых параметро могут быть использованы, например, цикловой расход топлива Gi или воздуха Gg, угол опережения зажигания 9, количество рециркулируемых отра- ботавших газов Gj в процентах к их общему количеству. Можно, например, поддерживать минимальный относительный уровень удельного расхода топлива мин (максимальная экономичность) при отсутствии рециркуляции отработавших газов путем регулирования циклового расхода топлива G. или воздуха Gg (см. точку 1 на графике б на фиг. 1). Другим примером оптимизации является получение достаточно низкого относительного уровня окислов азота N0,(g NO)fR путем регулирования рециркуляции отработавших газов при одновременном обеспечении минимального относительного уровня удельного расхода топлива gg geR мцн (точка 2 на графике б на фиг. 1). Благодаря разбавлению смеси отработавшими газами расход топлива при этом не увеличивается по сравнению с первым случаем оптимизации, т.е. §е мин Использование способа основано на том, что при заданном относительном уровне оптимизируемого выходного параметра и фиксированных при этом значениях частоты вращения п и нагрузки Р нестабильность определенным образом связана с регулируемым параметром, например, с количеством рециркулиру- емых отработавших газов (см. график а на фиг. 1), Способ поясняется на последнем из приведенных-выше примеров, т.е. на примере обеспечения уровня N0)(g , который соответствует минимальному относительному уровню удельного расхода топлива при рециркуляции отработавших газов gg gg ,ц . Для того чтобы обеспечить выполнение указанного требования в процессе эксплуатации двигателя добиваются его выполнения в процессе эксперимента и при этом получают, например, семейство зависимостей Д(Р) при разных фиксированных значениях частоты вращения п const при g geRAKiH а значит, и при NOyg (график а на фиг. 2). Это семейство зависимостей реализуют в соответствующем постоянном запоминакщем устройстве и по нему определяют для текущих значений п и Р (график б на фиг. 2) опорный уровень нестабильности А при задан-
ном оптимизируемом параметре,, т.е. при gg ggRjviHH. а значит, и при -XR -XR J7 (график в на фиг. 2).
Вычисляют текущее значение нестабильности вращения Л-i и разность между текущим значением и опорным уровнем нестабильности Л оп (график в фиг. 2 и формируют по этой разности управляющий сигнал на ее устранение, которым воздействуют на орган регулирования рециркуляции отработавших газов.
При этом текущее значение нестабильности A-J. стремится к опорному уровню UQf, , а количество рециркулируемых отработавших газов стремится к.величине, обеспечивающей указанный эффект.
Определение по результатам измерения нагрузки Р и частоты вращения п опорного уровня нестабильности Лор при заданном оптимизируемом параметре, т.е. при ggp geRMHH. NOxfj ), на фиг. 2 поясняется следующим образом.
Моменты времени отмечены точками 3-14. Нагрузка Р между точками 3 и 4 убывает, между точками,4-6 сохраняется постоянной и после этого возрастает.
Частота вращения п между точками 3-5 сохраняется постоянной и равной ., между точками 5-8 она уменьшается до величины , между точками 8 и 9 сохраняется постоянной и равной , между точками 10-13 уменьшается и далее сохраняется постоянной и равной .
Определение опорного уровня нестабильности иллюстрируется построениями при помощи штриховых линий, В момент времени, отмеченный точкой 3, значение.нагрузки Р проектируется на зависимость семейства U (Р)J полученную при ,, т.е. в точку 3 (см, графики б и а. Из точки 3 опускают перпендикуляр на горизонтальную ось на графике а, и полученная на этой оси точка переносится на вертикальную ось Д на графике в. Из этой точки проводится горизонтальная, а из точки 3 проводится вертикальная линии, и на их пересечении отмечается точка 3, которая является значением опорного уровня нестабильности в рассматриваемый момент времени.
Аналогичные построения осуществляв ются в моменты времени, отмеченные точками 4, 5, 8, 9, 13 и 14. При этом J используют соответствующие зависимости семейства й(Р), полученные при или , а значения опорного уровня нестабильности & д на графике в отмечают точками 4 ,
г /- , т 1 /
10 5 5 6 , 13 и 14 соответственно.
Моменты времени, отмеченные точками 6, 7, 10, 11 и 12, характерны тем, что действительные значения частоты вращения п не равны ни одному из зна-
5 ченйй, при которых получены зависимости семейства Д(Р) на графике а. В эти моменты исмольз тот ту зависимость, которая получена при частоте вращения, ближайшей к ее действитель-
0 ному значению. В соответствии с этим 3 момент, отмеченный точкой 6, используют зависимость, полученную при , в моменты, отмеченные точками 7, 10 и П - зависимость, по5 лученную при (, а в момент, отмеченный точкой 12 - зависимость, полученную при .з. Значения опорного уровня -нестабильности, полученные в- эти моменты, отмечены на графи, /I // , „ // . . // . „ 7/
0 ке в точками D5/,lU,li ,
а соответствующие им промежуточные точки на графике а отмечены точками 6 , 7 , 10, 1 П - и 12. Значения опорного уровня нестабильности в эти моменты можно получить и другими методами, например интерполяцией.
Принятая в данном способе мера нестабильности вращения позволяет при вычислении текущего значения
0 нестабильности устранить влияние регулярных изменений частоты вращения в случае наиболее распространенного на практике равноускоренного разгона двигателя, т.е. при линейном возрас-
5 тании частоты вращения во времени. Это относится -и к равнозамедленному вращению, пoэтo ry с учетом возможности аппроксимации любого закона изменения частоты вращения линейными
д отрезками можно утверждать, что уст раняется влияние регулярньк изменений частоты вращения пив любом ско«;ростном режиме двигателя, включая
неустановивщиеся скоростные режимы.
Причиной нестабильности (неравномерности) вращения коленчатого вала является неравномерность (нестабильность давления газов в цилиндрах, Указанная неравномерность суммируется по соседним интервалам времени. В данном способе неравномерность давлений суммируют по интервалам вре мени, равным рабочим циклам двигателя, т.е. по двум периодам вращения. Это позволяет в максимально возможной степени снизить ложный сигнал нестабильности при неисправности одного из цилиндров двигателя. / Для возможно большего сокращения времени измерения нестабильно.сти вращения суммирование давлений в данном способе производится по сосед- ним интервалам времени, каждый из ко торых равен продолжительности рабочих циклов, но при условии, что отсчет каждого интервала начинается с отсчета каждого очередного периода вращения , т.е. второй период предыдущего рабочего цикла является первы последующего. Нестабильность вращения является следствием неравномерности суммарных значений давлений в цилиндрах от одного принятого вьщ1е интервала времени к другому. Для аналитического вывода выражения для текущего значения нестабиль1 (M-w)iJ{f-l t 2lt;27(iM) где Л р неравномерность (нестабиль- ность) суммарного (среднего за рассматриваемый временной интервал) давления за два соседних интервала времени. 2 Г/ М / Ml 311-гт-таГиТ т г L Uz j f ,+3 UilJ OTu2KT;+T;,2)Tf,vrui-(Tui-ru3)( т.- .т. 142 Ч+З
поскольку при сложении и умножении периодов можно считать, что
- TJ,,TU,T.,T;,
Таким образом, получено выражение для нестабильности вращения вала, которая пропорциональна неравномерности давления газов в цилиндрах и именно этой неравномерностью вызвана.; . ; ,
Коэффициент пропорциональности роли не играет, поэтому нестабильность вращения может быть записана
СТ;-Т,2ЬСт,)
(О
Т;
Выражение (1) может быть исполь.зовано только на установившихся скоростных режимах двигателя. На неустановившихся скоростных режимах и, в частности, в наиболее типичном ности вращения запишем уравнение моментов двигателя в дифференциальной JM лГМ , dco Ul ЧТ) Jq - - dt ir lVdiгде М - крутящий момент двигателя; W - внешний момент сопротивления; 1 - момент инерции; СО - угловая частота вращения коленчатого вала; СР - угол поворота коленчатого вала. Интегрируя в течение одного интервала времени, равного рабочему циклу двигателя, т.е. сумме двух соседних периодов вращения, получим (M-w jcf-e :) Разница результатов, полученных для двух соседних интервалов времени, каждый из которых равен продол- жительности цикла, но начинается со второго периода предыдущего цикла, для левой части предыдущего равенства при постоянной нагрузке, т.е. при W const,равна 27(2) 1«( 3( Mdcf up, Правая часть рассматриваемого paвенства для двух соседних интервалов времени является нестабильностью (неравномерностью) вращения вала и и равна )Tua-n 1 + 5 случае равноускоренного разгона двигателя помехи от регулярных изменений частоты вращения коленчатого вала могут оказаться соизмеримыми с полезньм сигналом и даже могут превьшать его. /т. т 2i I U M-itbli- 7,4x4-0,5(Tu Т..Т Если влияние регулярных и-зменений не будет ликвидировано, то при вычислении текущего значения нестабильности . по соотношению (2),они будут восприняты как дополнительная нестабильность. + з}реги1+1 itji i-t2 Т;,5 т,,,(;5(т ,Т --(TrTUz) (..) т-«+о,б(т,,-1-т,|;з1 Т.-Т . т- .1 1 + t ti (T, .т. Jiil . .(т.-г. и ,,э Tu2 + 0,5(THi + T-,3) ,Ч,.
т-Т;
+ 1 где (Т;, -Т,,)рег и (Т.-Т.)рв, разности периодов, обязательные тол ко регулярным изменениям, а Т, ) и разности перио дов, обязанные нестабильности враще ния. Влияние регулярных изменений, отраженное первым слагаемым, т„е. первой дробью выражения (3), ликвидируется, поскольку эта дробь обра щается в нуль. . иL ( Т.;,/рег ииг Ti/per, T;,,t0.6(lu,-HTi,) Т,,,.0,5(Т-,,.ТО где п- 43 Т ,+2 ТГ Равенство нулю последнего выра-
жения объясняется тем, что вычитаемые друг из друга дроби равны одному и тому же тангенсу угла наклона пря- НЭ
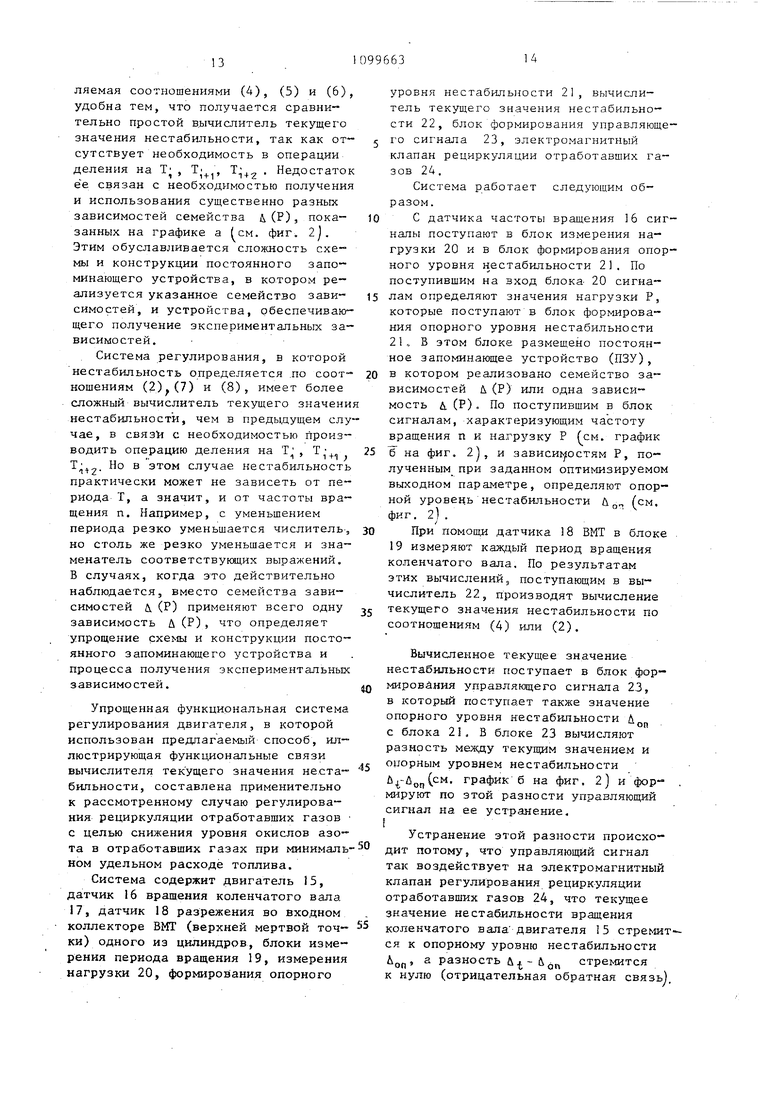
в нуль, значит устраняется влияние регулярных изменений частоты вращения, и выражение (2) характеризует Для устранения указанных помех в случае равноускоренного разгона двигателя вычисление текущего зна чения нестабильности можно производить в соответствии с соотношением (T-T. ) ,+0,5( ,2 В этом случае общее изменение вращения отражается кажущейся нестабильностью и определяется бы соотношением(T;-T,v2lperi() T,i .S(T, -1 1 + 2 .6(T,4a-T;) чI ,5СТ|,4ТО Это можно показать при помощи но- строений фиг. 3 с учетом того, что при анализе первой дроби (причем только первой дроби) в операциях сложения, умножения и деления периодов не учитываются их приращения из-за нестабильности в связи с Малостью приращений по сравнению с периодами и что по осиабсцисс фиг.Зотложе.ны пероидытолько регулярньрсизмерений. Преобразуем анализируемую дробь таким образом, что получим ,+ 0,5(Tu,T;,,,) Т,,0,5 (Т;,,4Т:) МОЙ, отражающей равноускоренный разгон (см. фиг. 3). Таким образом, для рассматриваемого случая равноускоренного разгона двигателя первая дробь, т.е. первое слагаемое выражения (3), обращается только текущее значение нестабильности вращения. Коэффициенты, на которые умножаю ся выражения в скобках соотношения (2), являются переменными, так как зависят от значения периодов. Благо даря различию между этими коэффициентами обеспечивается ликвидация вл яния регулярных изменений частоты вращения. Тем не менее величины обо их коэффициентов близки друг -к друг и мало отличаются от величины 0,5. Поэтому величина нестабильности, определяемая по соотношению (2), от личается от величинынестабильности определяемой по отношению (1), прак тически только постоянным коэффициентом 0,5. Из STqro следует, что аналитические выкладки, использован ные при выводе выражения (1), остаются справедливыми и для выражени (2). Если, как было показано вьше, первое слагаемое, т.е. первая дробь выражения (3), обращается в нуль, то это значит., что обращается в нуль ее числитель. Учитывая, что обе дроби выражения (3) имеют одинаковый знаменатель, можно утверждать, что при использовании в качестве меры нестабильности только числителя выражени (2) влияние регулярных изменений частоты вращения также будет ликвидировано. В связи с этим в предложенном способе текущее значение нестабиль- ности определяют так Ti,2 Т; д (т -т 1И i4})j, J. QRI-r. XT, Г 1+5 4+2 ttrn-э) ЧТ;-Т;+,) )Текущее значение нестабильности определяемое по соотношению (2), можно назвать приведенным текущим значением нестабильности приведено к Т- Т.,-Т-). В случае целесообразности, исход из инерционности системы регулирова ния, текущие значения нестабильности усредняют по результатам нескол ких вычислений, и по этому усреднен ному значению вычисляют разность ме ду текущим значением и опорнйм уров нем нестабильности. Каждую экспериментальную зависиость семейства Д (Р) на графике а (см. фиг. 2) получают при постоянном начении частоты вращения п, а знаит, и периода Т (без учета нестаильности) , Поэтому используемые в казанном семействе экспериментальые зависимости получают с учетом тоо, что в формуле (4) в этом случае еобходимо принять коэффициенты, орректирующие как первую, так и вторую разности, равными 0,5. Кроме тогО по осям графика а и графика б на фиг. 2 может .быть отложен только модуль величины нестабильности. Следовательно, откладываемые по осям указанных графиков значения нестабильности, получают по выражению .(TrTu.-o,s. Каждое из этих значений получают как среднее арифметическое результатов множества измерений, поэтому можно записать .rTH3b(T;-T,,,), где k 100-200, а j - номер иэмерения. Полученный по значениям Д опорный уровень нестабильности всегда является положительной величиной, а значит, и сравниваемое с ним текущее значение нестабильности тоже должно быть положительной величиной. Поэтому при использовании способа в описываемой системе регулирования текущее значение нестабильности, выражаемое (2) или (4), надо,брать по модулю. В случае использования в системе регулирования приведенного текущего значения нестабильности, определяемого по соотношению (2), вместо (5) запишется/ (Т;-т.,1 , 2,Т;Т., а вместо выражения (6) , 1;5(ТигТиз1-(Т;-Т;.г) ТГ )- J Система регулирования, в которой используется нестабильность, опреде- ляемая соотношениями (4), (5) и (6) удобна тем, что получается сравни тельно простой в.ычислитель текущего значения нестабильности, так как от- сутствует необходимость в операции деления на Т , Т , Т Недостато ее связан с необходимостью получени и использования существенно разных зависимостей семейства Л (Р), пока- занных на графике а (см. фиг. 2. Этим обуславливается сложность схемы и конструкции постоянного запоминающего устройства, в котором реализуется указанное семейство зависимостей, и устройства, обеспечивающего получение экспериментальных зависимостей. . Система регулирования, в которой нестабильность определяется .по соот ношениям (2)(7) и (8), имеет более сложный вычислитель текущего значени нестабильности, чем в предьщущем слу чае, в связМ с необходимостью производить операцию деления на Т , Т Но в этом случае нестабильность практически может не зависеть от периода Т, а значит, и от частоты вращения п. Например, с уменьшением периода резко уменьшается числительно столь же резко уменьшается и знаменатель соответствукщих выражений. В случаях, когда это действительно наблюдается, вместо семейства зависимостей Л (Р) применяют всего одну зависимость Д (Р), что определяет упрощение cxehtu и конструкции постоянного запоминающего устройства и процесса получения экспериментальных зависимостей. Упрощенная функциональная система регулирования двигателя, в которой использован предлагаемый способ, иллюстрирующая функциональные связи вычислителя текущего значения неста бильности, составлена применительно к рассмотренному случаю регулирования рециркуляции отработавших газов с целью снижения уровня окислов азо та в отработавших газах при минималь ном удельном расходе топлива. Система содержит двигатель 15, датчик 16 врашения коленчатого вала 17, датчик 18 разрежения во входном коллекторе ВМТ (верхней мертвой точки) одного из цилиндров, блоки измерения периода вращения 19, измерения нагрузки 20, формирования опорного уровня нестабильности 21, вычислитель текущего значения нестабильности 22, блок формирования управляющего сигнала 23, электромагнитный клапан рециркуляции отработавших газов 24. Система работает следующим образом. С датчика частоты вращения 16 сигналы поступают в блок измерения нагрузки 20 и в блок формирования опорного уровня нестабильности 21. По поступившим на вход блока- 20 сигналам определяют значения нагрузки Р, которые поступают в блок формирования опорного уровня нестабильности 21„ В этом блоке размещено постоянное запоминающее устройство (ПЗУ), в котором реализовано семейство зависимостей Л(Р) или одна зависимость U. (Р) . По поступившим в блок сигналам, характеризующим частоту вращения п и нагрузку Р (см. график б на фиг, 2J, и зависи1 остям Р, полученным при заданном оптимизируемом выходном параметре, определяют опорной уровень нестабильности и (см. фиг. 2). При помощи датчика 8 ВМТ в блоке . 19 измеряют каждый период вращения коленчатого вала. По результатам этих вычислений, поступающим в вычислитель 22, производят вычисление текущего значения нестабильности по соотношениям (4) или (2). Вычисленное текущее значение нестабильности поступает в блок фор мировАния управляющего сигнала 2.3, в которьлй поступает также значение опорного уровня нестабильности Д с блока 21. В блоке 23 вычисляют разность между текущим значением и опорным уровнем нестабильности ,(cM. график б на фиг. 2) и формируют по этой разности управляющий сигнал на ее устранение. Устранение этой разности происходит потому, что управляющий сигнал так воздействует на электромагнитный клапан регулирования рециркуляции отработавших газов 24, что текущее значение нестабильности вращения коленчатого вала двигателя 15 стремит ся к опорному уровню нестабильности ti, а разность ь стремится к нулю (отрицательная обратная связь). Использование способа позволит снизить уровень окислов азота в окружающей среде при одновременном обеспечении высокой экономичности двигателя. Способ обеспечивает также коррек цию работы карбюратора, при помощи
.Ga-Л
а
9k-Л
oL 316 которой осуществляют более точную оптимизацию выходных параметров двигателей (поддержание определенного значения коэффициента избытка воздуха, минимальной токсичности отработавших газов, максимальной экономичности и т.п.), чем при некоррек- тированном карбюраторе.
CM
tvi
П
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ определения нестабильности вращения коленчатого вала двигателя внутреннего сгорания | 1982 |
|
SU1252523A1 |
| Способ регулирования двигателя внутреннего сгорания | 1980 |
|
SU1204765A1 |
| Способ регулирования двигателя внутреннего сгорания | 1981 |
|
SU1183703A1 |
| Способ регулирования двигателя внутреннего сгорания | 1980 |
|
SU1280162A1 |
| Способ регулирования двигателя внутреннего сгорания с рециркуляцией отработавших газов | 1980 |
|
SU1260548A2 |
| Способ регулирования параметров двигателя внутреннего сгорания | 1979 |
|
SU1218163A1 |
| СПОСОБ УПРАВЛЕНИЯ ПОДАЧЕЙ ТОПЛИВА В ДВИГАТЕЛЬ ВНУТРЕННЕГО СГОРАНИЯ ПО МЕЖЦИКЛОВОЙ НЕСТАБИЛЬНОСТИ ПРОЦЕССА СГОРАНИЯ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1989 |
|
RU2029124C1 |
| Способ определения нестабильности вращения коленчатого вала двигателя внутреннего сгорания | 1983 |
|
SU1126707A1 |
| Способ регулирования карбюраторного двигателя внутреннего сгорания | 1980 |
|
SU939801A1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ УГЛА ОПЕРЕЖЕНИЯ ВПРЫСКА ТОПЛИВА ДВИГАТЕЛЯ ВНУТРЕННЕГО СГОРАНИЯ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2013 |
|
RU2543091C1 |
Способ определения нестабильности вращения.двигателя внутреннего сгорания путем измерения каждого периода вращения коленчатого вала, получения первой и второй разностей между двумя парами периодов, вычисления текущего значения нестабильности за временной интервал путем вычитания одной разности из другой, отличающийся тем, что, с целью расширения области применения способа путем распространения его на все скоростные режимы двигателя при оптимизации различных выходных параметров и повышения его точности, за временной интервал принимают время, равное продолжительности рабочего цикла двигателя, причем при определении разностей между двумя парами периодов периоды чередуют, текущее значение нестабильности вращения определяют по первой разности между периодами Tj и и по второй разности между .периодами Tj и Т корректируют первую разность умножением на величину Т; Т iti ,5(T,/Tb,) ( (Л а вторую разность - на величину iti Tu,0,MT;tT;,) 1 + 1 где Т - период; i - номер i-ro периода; и определяют приведенное текущее значение нестабильности путем деле;о ния текущего значения нестабильности, вычисленного вычитанием одной О) корректируемой разности из другой, Р на произведение трех последовательW ных периодов Т и Т if 2 О1 (