1
Изобретение относится к способ регулирования двигателей внутреннго сгорания, в частности к регулированию двигателей легкого топлива в том числе с форкамерно-факельным зажиганием.
Известен способ регулирования двигателя внутреннего сгорания путем измерения каждого временного интервала, вычисления текущей нестабильности вращения коленчатого вала как разности величин параметра вращения, определяемых в течени двух соседних временных интервалов, измерения нагрузки и частот вращения коленчатого вала и оптимизации при помощи регулируемого параметра выходного параметра двигателя j .
Указанный способ обеспечивает повьшение экономичности двигателя снижение токсичности отработавших газов. Однако временным интервалом и параметром вращения считают период вращения коленчатого вала. Пр этом, во-первых, неисправность одного из цилиндров многоцилиндрово- Г о двигателя вызьшает ложный сигна нестабильности значительной величины и, во-вторых, регулирование этим способом возможно только на установившихся скоростных режимах, поскольку только на этих режимах может быть выявлена нестабильность Кроме того, при использовании при регулировании только нестабильност вращения коленчатого вала можно оптимизировать только один из выходных параметров, причем только одним регулируемым параметром.
Цель изобретения - обеспечение универсальности регулироваютя.
Поставленная цель достигается тем, что за временной интервал принимают продолжительность рабочего цикла двигателя, дополнительно измряют частоту вращения коленчатого вала в одинаковую фазу каждого цик ла по этим измерениям определяют угловое ускорение коленчатого ва- ла, за время между двумя очередными указанными измерениями и считают его указанным параметром вращения, выбирают для оптимиза Д1И разные, чередующиеся в процессе рабо- ты двигателя, выходные параметры, осуществляют оптимизацию одного ил более выходных параметров не мене
I
-
0 5
5 O 5
чем регулируемыми параметрами, для чего определяют по нагрузке и частоте вращения опорный уровень нестабильности, соответствующий оптимизируемым выходным параметрам, вычисляют разность между текущим значением и опорным уровнем
нестабильности и формируют по этой I
разности управляющий сигнал для одного регулируемого параметра на устранение указанной разности, определяют по нагрузке, и частоте вращения опорные значения каждого другого регулируемого параметра, соответствующие оптимизируемым выходным параметрам, и по этим значениям вырабатьшают другие управляющие сигналы для соответствующих регулируемых параметров.
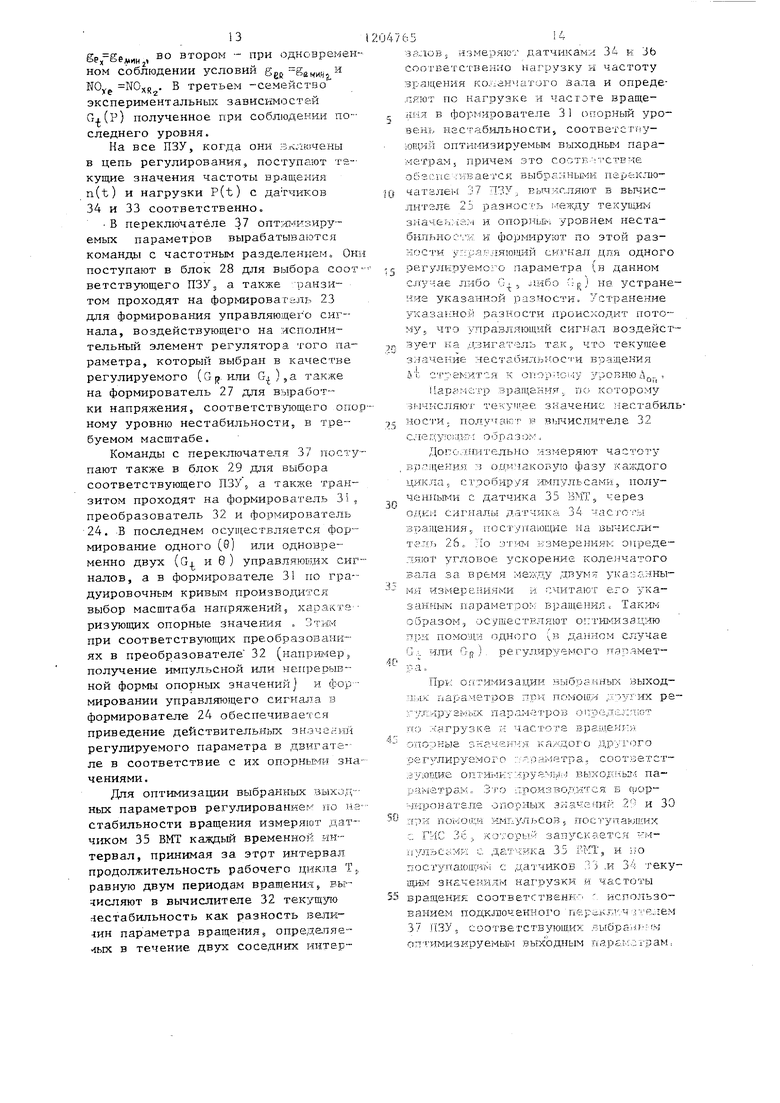
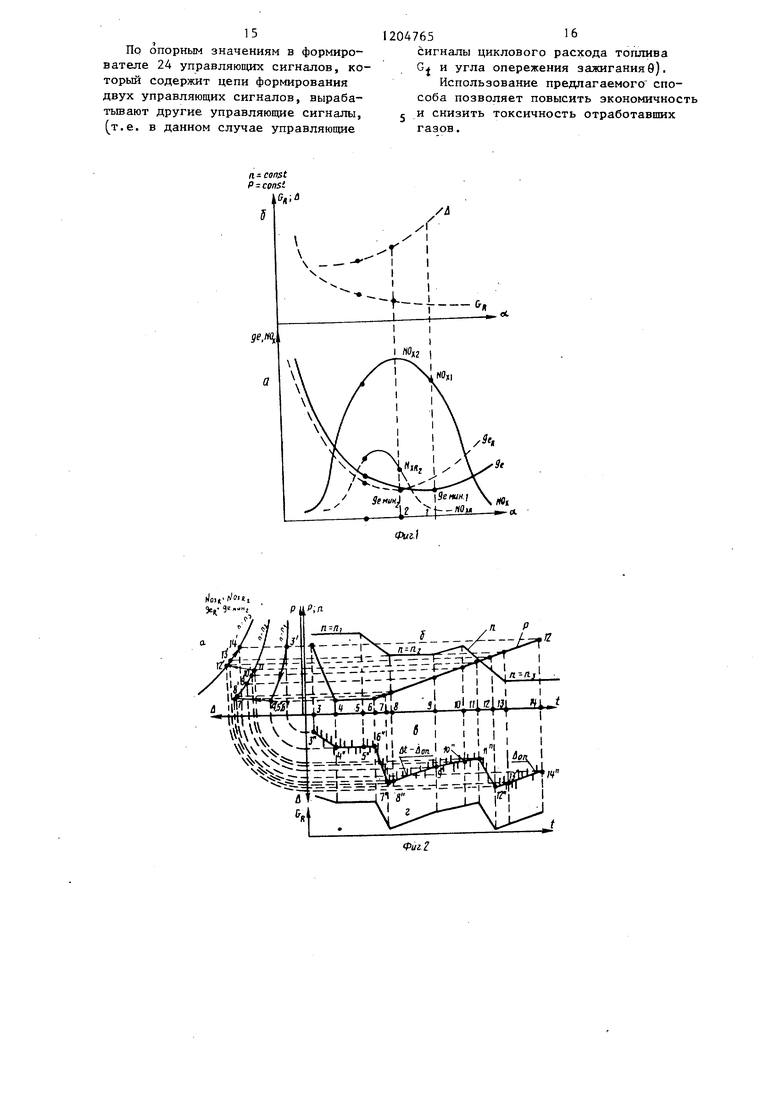
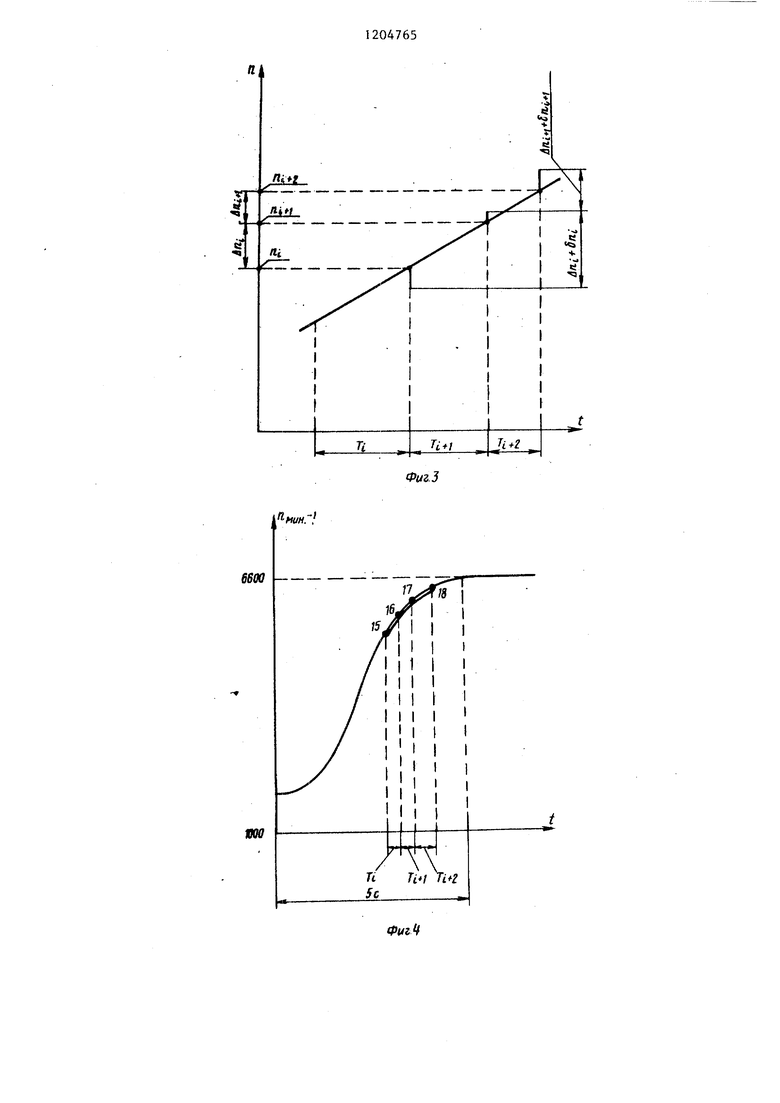
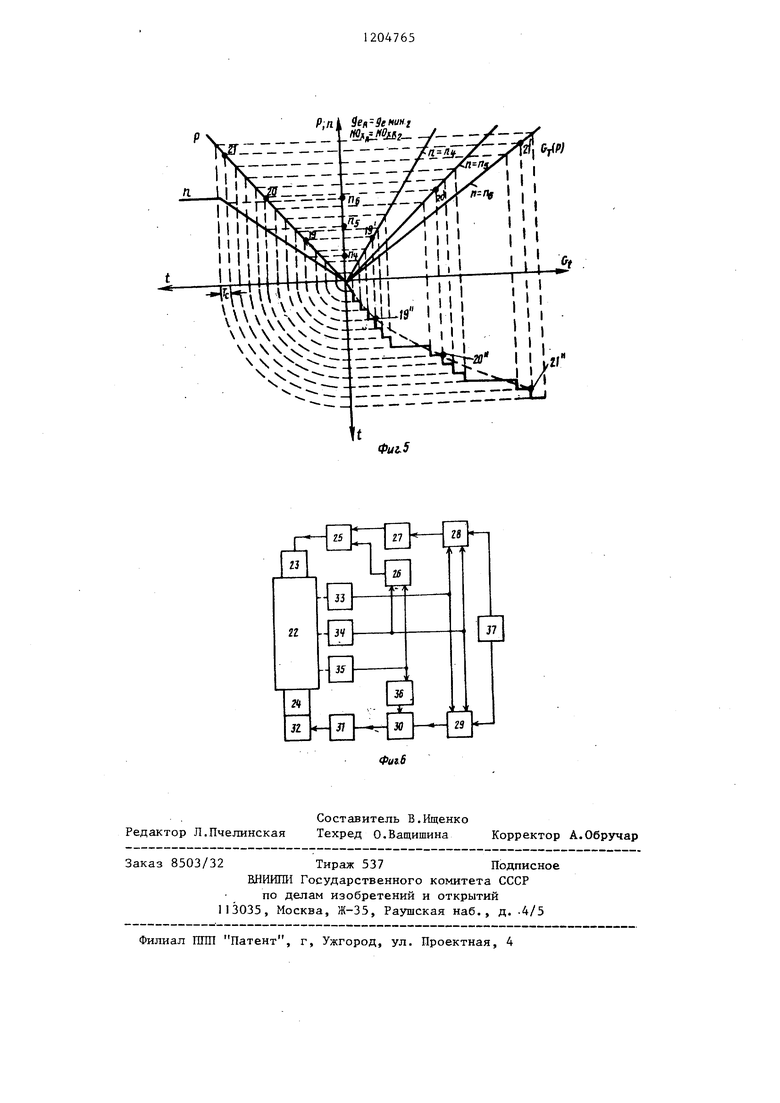
На фиг. 1 показаны некоторые экономические и токсические характеристики в зависимости от коэффициента избытка воздуха о(а и зависимость нестабильности от о(, при соответствующем изменении количества рециркулируемых отработавших газов ) , на фиг. 2 - показаны семейство зависимостей Л (Р),(а) зависимость нагрузки Р и частоты вращения V) от времени (б } , значения опорного уровня нестабильности ( АО,, (в) к зависимость количества рецир- ку. шруемьк отработавших газов Gj в процентах от общего количества отработавших газов ( на фиг. 3 - линейное изменение частоты вращения и ее приращения в результате нестабильности; на фиг. 4 - аппроксимация кривой разгона; на фиг. 5 - принцип получения опорных значенийJ на фиг. 6 - функциональная схема системы для реализации способа.
Приняты следующие обозначения: ц - частота вращения коленчатого вала,, и VI - прираацение частоты вращения коленчатого вала вследствие регулируемых изменений п приращение частоты вращения коленчатого в результате нестабильности,; Т - продолжительность рабочего цикла двигателя, Т, - период считывания данных U - нестабильность врац;ения коленчатого вала; текуа ее значение нестабильности вращения коленчатого вала; Aon опорный уровень нестабильности вращения коленчатого вала;, оС. - коэффициент избытка воздуха; 0 - цикловой расход топлива; G - количество рециркулируемых отработавших газов в процентах от их общего количества; 9 - угол опережения зажигания-, - удельный расход топлива без рециркуляции; СсминГ минимальный удельный расход Топлива без рециркуляции; ge УДельньй расход топлива при рециркуляции, Ее,ц минимальный удельный расход топлива при рециркуляции,- окислы азота без рециркуляции, N0 - окислы азота при рециркуляции.
Способ предусматривает оптимизацию одного или более выходных парметров двигателя не менее чем двумя регулируемыми параметрами. Оптимизируемыми выходными параметрами могут являться, например, относительный уровень удельного расхода топлива (экономичность), относительный уровень токсичности отработавших газов (минимизация ТОКСИЧНОСТИ)и величина коэффициента избытка воздуха «i , а в качестве регулируемых параметров могут использоваться например, цикловой расход топлива G, количество рециркулируемых отработавших газов в процентах от их общего количества G( и угол опережения зажигания 0 .
На фиг. 1а показаны кривые изменения удельного расхода топлива без рециркуляции (gg сплошная линия) и удельного расхода топлива gg,, при наличии рециркуляции отработавших газов (бео штриховая линия), кривые изменения количества окислов азота без рециркуляции (N0, сплошная линия) и при рециркуляции (N0,,, штриховая линия) в зависимости от коэффициента избытка воздуха об. На фиг. 1 показано изменение G в за- висимости от Л, обеспечивающее показанные штриховыми линиями изменения geo и NOx, и изменение нестабильности вращения Д в зависимости от -об при соответствующем изменении Gg. Все кривые фиг.1 построены при соблюдении условий n const и P const.
Регулирование циклового расхода топлива G совместно с регулированием угла опережения зажигания 9 можно обеспечить оптимизацию относительного уровня удельного расхода топлива бе бемйн который при разных рагрузках-и частотах вращения является разным (относитель204765
ный уровень), но всегда сохраняется минимальньгм и соответствует режиму эффективного обеднения смеси (точка 1). При таком режиме сохра- J няется высокий относительный уровень окислов азота N0 .
Для снижения уровня окислов азота до N0 (точка 2) производят рециркуляцию отработавших газов 0 совместно с регулированием угла опережения зажигания 9. В результате указанного совместного- регулирования относительный уровень удельного расхода топлива становитJ5 я равным geR ge/WMH практически сохраняется минимальный удельный расход топлива (вемин 6емии|) Без рециркуляции удельный расход топлива в точке 2 был бы выше
20 сплошная линия). Регулируемыми пара- . метрами для оптимизации N0,; ,являются G и б ,а для оптимизации пользуют три регулируемых параметра 0 , Gj и 8 . Следовательно, в дан25 ном случае производят оптимизацию одновременно двух выходных параметров тремя регулируемыми параметрами.
Для оптимизации выбирают равные , чередующиеся в процессе работы двигателя, выходные параметры, Например, при движении автомобиля по загородным игоссе главным требованием является экономичность, а токсичность не играет существенной ро ли. Поэтому в данном случае выбирают для оптимизации выходной параметр, отраженный в точке I фиг. 1, т.е. оптимизируют только относительньш уровень удельного расхода ТОП- АО
лива geMMH используя рециркуляцию отработавших газов.
. При езде по городу главным требованием является снижение токсичности. В данном случае выбирают для оптимизации выходные параметры,
отраженные на фиг. 1 в точке 2, т.е. выбирают для оптимизации одновр е- менно два выходных параметра ёе,, geMHH2« NO.g NOxRg.
В связи с одновременным использованием не менее двух регулируемых параметров применяют одновременно два процесса регулирования, один из которых является более
55 совершенным, но может быть использован для регулирования только одного параметра. В этом процессе регулирования используется зависи30
мость между регулируемым параметром и нестабильностью вращения коленчатого вала, т.е. производится регулирование по нестабильности Этот процесс предусматривает наличие замкнутой петли обратной связи и именно поэтому он может быть использован только для одного (первого) регулируемого параметра.
В другом процессе регулирования использована зависимость между регулируемым параметром с одной стороны и частотой вращения коленчатого вала и нагрузкой с другой, т.е. осуществляется регулирование по частоте и нагрузке. Для реализации этого процесса используется регулятор с разомкнутой петлей обратной связи и поэтому он может быть использован одновременно для нескольких регулируемых параметров.
Процесс регулирования по нестабильности на фиг. 2 рассматривается для случая, когда в качестве пер iBoro регулируемого параметра используется количество рециркулируе- мых отработавших газов Gj, и этим регулируемым параметром осуществляется оптимизация (минимизация) относительного уровня N0 -N0(, и одновременно оптимизация относительного уровня удельного расхода топлива ,HH2 Р помопщ двух других регулируемых параметров: циклового расхода топлива G и угла опережения зажигания. Рассматриваемый процесс регулирования основан на том, что нестабильность при данном nL зависит от G g (график б, фиг
Кроме того, при соблюдении ус- ловий N0}(const и gg const (в данно случае при ,R,const и ge ge const) нестабильность u однозначно связана с нагрузкой двигателя Р и частотой вращения И .
Для того, чтобы обеспечить выполнение условия N0 при
-ge/i,«H процессе эксплуатации добиваются его выполнения в процессе эксперимента и при этом, например, получают семейство зависимостей й(Р) при разных фиксированных значениях частоты вращения n const при одновременном соблюдении условий N0,g КО,й. и geR ge««H2 (график а , фиг. 2).
Эти зависимости реализуют в со-- ответствующем постоянном запоминат
1204765
15
ющем устройстве и по ним определяют для текущих значений ц и Р ту величину нестабильности, при которой выполняется требование N0 5 N0 при ggR-geMNHg- Эта величина является опорным уровнем нестабильности др и соответствует определенному количеству рециркулируемых отработавших газов при заданных to условиях. Следовательно, по нагрузке и частоте вращения определяют опорный уровень нестабильности, соответствующий выходным параметрам.
Текущее значение нестабильности u t поддерживают регулированием рециркуляции вблизи опорного уровня UQ , обеспечивая тем самым од
новременную оптимизацию ge geMMH и NOxR.NOxRg .
При помощи точек (фиг. 2) штриховыми линиями показаны построения, поясняющие определение опорного уровня нестабильности (график Б) по текушдм значениям п и Р (график б) и зависимостям h () (график а). На графике г показано изменение количества рециркулируемых отработавших газов G| в процентах от их общего количества во времени Gp,(t) в соответствии с опорным уровнем нестабильности.
Точкой 3 отмечено начало отсчета времени в процессе регулирования.
Между точками 3 и 4 нагрузка двигателя Р уменьшается, между точками 4-6 сохраняется постоянной, между точками 6-14 возрастает. Частота вращения коленчатого вала п между точками 3-5 сохраняется постоянной и равной (, между точками 5-8 она уменьшается, между точками 8 и 9 сохраняется постоянной и равной п-п, между точками 9 и 0 возрастает, между точками 10-13 уменьшается и между точками 13 и 14 сохраняется постоянной и равной .
Построения, поясняющие получение опорного уровня нестабильности, показанного на графике в () производятся следующим образом.
В момент 3 частота вращения равна ( . Поэтому значения: Р, соответ- ствую1цие этому моменту, проектируются на зависимость й(Р), построенную при , (точка 3 на графике а). Из этой точки опускается перпендикуляр на ось д и полученное значение л с горизонтальной оси на графике а переносят на вертикальную ось Д на графике в. Затем из этой точки проводят горизонтальную штриховую линию, а из точки 3 вертикальную. Их пересечение в точке 3 является величиной опорной нестабильности в момент 3.
Аналогичные построения производя в моменты времени 4,5,8,9, 13 и 14 и при ПОМО1ЦИ соответствующих точек 4,5,8,9,13 и 14 на графике а получают значения опорного уровня нестабильности 4,5 ,8 ,9,1З и 14 на графике в.
Построения в точках 6,7,10 и 11 характерны тем, что в эти моменты частота вращения вала И не равна ни одному из значений, при которых построены семейства зависимостей д(Р) на графике а, и иллюстрируют тот факт, что из семейства зависимостей л(Р) используют зависимост полученную при том фиксированном значении п, которое ближе к текущему значению частоты врапсения. При определении опорног о уровня и ц,, для промежутков времени, когда текуище значения )i не равны тем фиксированным значениям, при которых получены зависимости семейства и (р) , може быть применен и другой метод, например, метод интерполяции.
Текущую нестабильность вращения коленчатого вала ii вычисляют как разность величин параметра вращения определяемых в течение двух соседних временных интервалов. За временной интервал принимают продолжительность рабочего цикла двигателя Т, а за параметр вращения - угловое ускорение коленчатого вала, при это дополнительно измеряют частоту вращения коленчатого вала в одинаковую фазу каждого цикла (например, через раз в верхней мертвой точке ВМТ одного цилиндра), определяют по этим измерениям приращение частоты вращения за время между двумя указанными измерениями и считают его указанным параметром вращения.
После определения текущего значения нестабильности и опорного уровня нестабильности вьиисляют разность ЗДУ текущим значением и опорным уровнем нестабильности (график- в, фиг. 2) и формируют по этой разности управляюсций
04765. 8
сигнал для одного регулируемого параметра, в данном случае для количества рециркулируемых отработавщих газов, на устранение указанной раз5 ности. Таким образом, разность д - ugj, является сигналом ошибки в замкнутой системе регулирования, Управ- ляюищй сигнал поступает на исполнительный элемент регулятора рецир10 куляции, воздействующий на орган регулирования рециркуляции, который, в частности, может быть клапаном с электрическим дискретным управлением. Воздействие произво15 дится таким образом, что изменение количества рециркулирующих отработавших газов приводит к уменьшению сигнала ощибки, т.е. текущее значение нестабильности Л стремится к
20 опорному уровню Лд,,, соответствующему оптимизируемым параметрам, вследствие чего выполняются условия
-XR
и geg-geMrH2Процесс регулирования по неста- бильности при использовании в качестве регулируемого любого параметра, например циклового расхода топлива G, можно иллюстрировать графиками, аналогичными изображенным на фиг. 2, при условии замены Gj на cooтвeтcтвyюш й параметр, например на С- .
Принятая мера нестабильности вращения позволяет при определении нестабильности устранить влияние регулярных изменений частоты вращения на неустановившихся скоростных режимах, а также влияние сравнительно низкочастотных циклических колебаний частоты вращения, наблюдаемых на установившихся скоростных режимах (фиг. 3 и 4 j. При принятой мере нестабильности в соответствии с фиг. 3, на которой показано линейное возрастание во времени частоты вращения, т.е. отражено равноускоренное вращение вала, общее приращение параметра вращения, т.е. разность величин параметра вращения, определяемых в течение двух
соседних временных интервалов,
йП;
Л 5п;, .|Уп;
i+i i-fi где Т. и продолжительность двух соседних интервалов , за которую принята продолжительность рабочих циклов;
9,
ЛИ,ийп, приращение частоты вращения соответст венно за цикл Т,, к обусловленные регулярньти изменениями частоты вращения, в частности, на неустановившихся скоростн ых режимах; 8п; и Sn- - нерегулярные изменения частоты вращения соответственно з те же циклы.
Поскольку частоту вращения дополнительно измеряют в одинаковую фазу каждого цикла, то время между двумя указанными очередными измерениями равно продолжительности цикла. Поэтому каждая дробь приведенного выражения является соответствующим угловым ускорением, т.е. параметром вращения, а разность между ними определяемая в течение двух соседних интерв-алов, является нестабильностью вращения.
Последнее вьфажение можно записать в виде:-, , , dn;
i
ita in
Т + г i-n Как видно из фиг. 3 при линейном изменении частоты вращения первая скобка приведенного выражения обращается в нуль и поэтому нестабильность о л . Siau iJn;
тГтГ
itz Uti
т.е. влияние регулярных изменений частоты вращения устраняются.
Изменение частоты вращения не является линейным. Для примера на фиг. 4 изображена кривая разгона автомобильного двигателя. Эту кривую можно аппроксимировать ками прямых, соединяющих точки 15- 17 и 16-18. К аждый из этих отрезков рхватьшает участки двух соседних рабочих циклов, на протяжении которых вычисляют нестабильность. На зтих участках изменение частоты вращения можно приближенно считать линейным и, следовательно, можно пользоваться последней формулой. Правомерность аппроксимации всей кривой разгона подтверждается следующими соображениями.
Ориентировочное время разгона автомобильного двигателя от 1000 до 6000 об/мин на одной передаче можно принять равным 5 с. Среднее число W
оборотов вала
10 1000+6600
30
3800 об/мин 63 об/с.Следовательно, за время разгона осуществляется приг63Л5 ..
близительно 157 рабочих циклов
или приблизительно 78 пар таких циклов.
Таким образом кривая разгона (фиг.4) аппроксимируется 78 отрезками мых, что достаточно для принятого допущения,
Процесс регулирования по частоте и нагрузке иллюстрируется (фиг, З) на примере одновременной оптимизар.. ции относительных уровней
ек емииг - Охк. Все исходные зависимости для упрощения построений изображены прямыми, хотя реально они могут иметь
2Q достаточно сложную форму. Семейство зависимостей циклового расхода топлива G от нагрузки Р показаны при разных, фиксированных для каждой зависимости, частотах п.; Пд и jig
ij при заданных для всего семейства
относительных уровнях ge вемич
ГЮ,(д N0x0 Такие зависимости получают экспериментальным путем и реализуют в постоянном запоминающем устройстве системы регулирования.
По частоте и нагрузке с использованием указанных экспериментальных зависимостей определяют опорные значения регулируемого параметра, в данном случае циклового рас хода топлива G, соответствующие оптимизируемым выходным параметрам и по этим значениям вырабатывают управляющий сигнал для соот- ветстнующего регулируемого параметра.
О Считьшание данных и определение опорных значений происходит через равные промежутки времени: Т (период считывания). Предполагается, что когда частота вращения вала точно равна пх; п или п, при которых получены зависимости семейств 0(Р), происходит считывание. Тогда в соответствии с построениями, показанными штриховыми ли50 ниями, в эти моменты определяются текущие значения частоты вращения 19, 20 и 21. При помощи соответствующих точек 9, 20 и 21 на зависимостях G,(Р) полу55 чены опорные значения регулируемого параметра G( (t) в точках 19, 20 и 2 1 , Если бы зависимостей в семействе G(P) было бесконечное ,множе45
ство и считывание данных происходило бы непрерьшно, то была бы получена идеальная непрерьшная совокупность опорных значений,изображенная штриховой линией, соединяющей точки 19, 20, 21 кривой G,(t). Однако опорные значения определяются через равные промежутки времени Т , как показано построениями, причем по той зависимости Г1(Р), которая получена при частоте вращения п, ближайшей к текущему считываемому значению частоты вращения вала. Последнее обстоятельство, в частности, обеспечивает достаточно точное регулирование не только на установившихся но и на неустановившихся скоростных режимах. Действительные значения циклового расхода топлива в моменты считьшания данных приводятся к опорным значениям управляющим сигналом и поэтому изменяются по ступенчатой линии.
Опорные значения в промежутках между точками 19, 20, 21 могут определяться и другими методами, например, методом интерполяции.
Процесс регулирования по частоте и нагрузке при использовании в качестве регулируемого любого другого параметра, например, количества рециркулируемых отработавших газов Gg или угла опережения зажигания 6, при любых оптимизируемых параметрах может быть проиллюстрирован графиками, аналогичными изображенным на фиг. 5 при условии замены G,(p) соответствующим регулируемым параметром и построения семейства экспериментальных зависимостей, полученных при соответствующих оптимизируемых параметрах.
Система (фиг. 6) содержит двигатель 22, формирователь 23 первого управляющего сигнала, формирователь 24 других управляющих сигналов, вычислитель 25 разности между текущим значением и опорным уровнем нестабильности, вычислитель 26 текущего значения нестабильности, формирователь 27 опорного уровня нестабильности, блок 28 постоянных запоминающих устройств (ПЗУ) одного регулируемого параметра, блок 29 ПЗ других регулируемых параметров, формирователь 30 опорных значений регулируемых параметров, формирова0476512
тель 31 масштаба опорных значений, датчик 32 ВМТ одного цилиндра , генератор 36 импульсов считывания (ГИС) и переключатель 37 оптимизируемых па5 .раметров.
Указанная система осуществляет оптимизацию одновременно одного или двух выходных параметров двуйя или тремя регулируемыми параметрами,
10 при этом для оптимизации можно выбрать разные, чередующиеся в процессе работы двигателя, выходные параметры. При этом при езде автомобиля по городу в качестве выходных опти(5 мизируемых параметров выбирают одновременно относительные уровни 8ек еемйнИ N0x8 ,(точка 2, фиг.1) и оптимизация осуществляется тремя регулируемыми параметрами G , G (j
20 и 9, а при езде по загородному шоссе осуществляют оптимизацию одного выходного параметра ge geMMH (точка I, фиг. 1) при помощи двух регулируемых параметров G и б.
25 Выбор разных (чередую1цихся) выходных параметров осуществляют переключателем 37 оптимизируемых параметров. Он вырабатывает две команды: одну при езде по городу, другую
2Q при движении автомобиля по загородному шоссе.
При использовании одновременно двух регулируемых параметров (G и 9), т.е. при движении автомобиля по загородному шоссе, G регулируют по нестабильности при помощи формирователя 27 опорного уровня, а 0 - по частоте и нагрузке при по- МО1ЦИ. формирователя 30 опорных значений, а при использовании одновременно трех регулируемых параметров (G, GJJ и 9), т.е. при движении ав- тлмобиля по городу, GU регулируют по нестабильности при помощи формирователя 27, а два других регулируемых параметра G и 9 - по частоте и нагрузке, при помощи формирователя 30.
Блок 28 содержит два ПЗУ. В одном из них реализовано семейство экспе риментальных зависимостей л(Р),- полученное при соблюдении условия gg gej,,,,,a в другом-при соблюдении одновременно двух условий и NO,,R.
55 Блок 29 содержит три ПЗУ. В одном из них реализовано семейство экспериментальных зависимостей д(Р). полученное при соблюдении условия
35..
40
45
5е ёемин t ° втором - при одновременном соблюдении условий б()82„ин, N0 N0, . В третьем -семейство экспериментальных зависимостс .й G..(P) полученное при соблюденной по- следнего уровня.
На все ПЗУ, когда они включены в цепь регулирования, поступают текущие значения частоты вращения n(t) и нагрузки P(t) с датчиков 34 и 33 соответственно.
В переключателе 37 оптж-: изиру- емых параметров вырабатываются команды с частотным разде,аением Ок поступают в блок 28 для выбора соот ветствующего ПЗУз а также ранзи- том проходят на формирователь 23 для формирования управляющего сигнала, воздействующего на исполнительный элемент регулятора того па- раметра, который выбран в качестве регулируемого (G. и.1Ш а также на формирователь 27 для выработки напряжения, соответству}ощего опоному уровню нестабильности, в тре- буемом масштабе.
Команды с переключателя 37 поступают также в блок 29 для выбора соответствующего ПЗУ; а также транзитом проходят на формирователь З,, преобразователь 32 и формирователь 24. В последнем осуществляется формирование одного (9) или одновременно двух (GI и 8) управляюошх сигналов, а в формирователе 31 по гра-- дуировочным кривым производится выбор масштаба напряжений, характеризующих опорные значения , Зть:м при соответствующих преобразозани- ях в преобразователе 32 (например;, получение импульсной или непрерывной формы опорных значений) и формировании управляющего сигнала ы формирователе 24 обеспечивается приведение действительных значений регулируемого параметра в двигателе в соответствие с их опорными значениями.
Для оптимизации выбранных зь ход-- ных параметров регулированием по нестабильности вращения измеряют дат-- чиком 35 ВМТ каждый временной интервал, принимая за этрт интервал продолжительность рабочего цикла Т, равную двум периодам врашвния, вычисляют в вычислителе 32 текущую г1естабильность как разность велиг- ин параметра вращения, опредепяе- иых в течение двух соседних интер
п
5
0
0
за: 10в 5 измеряю , датчиками 34 к ЗЬ соо-1 ветст-венно нагрузку и частоту ;з-ра1цення рсо.пан-чатого вала и определяют по нагрузке и час готе враще- ЯГ1Л в формирователе 31 опорный уровень настабильности, соответ-ст-пу- ющий опти --1изируемым выходным параметрам j причем это соотв.- тстЕме o53iMie гиваетск выбра:-;ньЕ ш переклю- чатвлем 37 ПЗУ; вычисляют в вычислителе 25 -разность текущим з -1ачеь: ;г;ч и опорньс-. уровнем неста- биг1ьнос- ; к- и формируют по этой разности у::-ра мшю)Шй cHi t-rari для одного ре,гулкруемого параметра IB данном случае либо 0, ju-t6o G i/j на устранение указанной разности. Устранение указаь:ной разности п-роисходит потому, что управл-|;яющий сигнал воздейст--- зует ка дзигатель так, что текущее значение нес-з абильнос ги вращения it стремится к oii-: p ioi.ry уровню д.,
11арс ме-д- р вращения. пс/ которому зычксляю г л ек-уп ее; значение нестабиль- ноС 1 И; полугакгг р зьиислителе 32 с,-1ецу 0 цк1-1 обра 3 ;;к „
Дополнительно из --1еряют частоту вращения :з одинаковую фазу калсдого цикла. стробир:/я импульсами, полученными с датчика 35 ВМТ, через один сигналы датчика 34 часго-гы вращения 5 посту|-1ающие на вычкски- телТ) 26 о ло этизу| кзмеренияк определяют угловое ускорение коленчатого вала за время между ДБум указанными измерениями и считают его ука- saHfihiM параметро;о вращения Таким образом, осуществляют О :тимизэцию при помоущ одного (в данном случае G .L или Grj ) регулируемого параметра .
Прк ОЕггимизации выбранных выход- n;,ix ГдарачетроЕ npvr помощи д-эуг их ре- д-улир-уамьЕК параметров опрелс,;;п|0т т .о лягрузке ;;- часто- в врашен;:я опорные значен -:я каждого другого регулируемого ;-;-раметра. соответст- зу.опдае оптиьж-;-лруе. выхорныг. параметрам,- 3-го лроизводктся Б (uop- - нронатЕле опорных значе 1ик 2 и 30 Л75И noKooii-i имл-ульсов,; поступающих :: ГИС 3с, ко лОр1;- л запускается м- :. улъсе:У1к с дат-чйка 35 , и ио TiocTynaxiin-if-i с датчиков 33 .и 3ч теку- Hpijyi значениям нагрузки и чб:ст-оты вращения соответственн- использованием подключенного перок кчп влем 37 ПЗУ. соответствующих выбраир-лм оптхтмизируемьЕ выходным .;1-раМ:
15
По опорным значениям в формирователе 24 управляющих сигналов, который содержит цепи формирования двух управляющих сигналов, вырабатывают другие управляющие сигналы, (т.е. в данном случае управляющие
1204765 6
сигналы циклового расхода топлива G и угла опережения зажигания 9).
Использование предлагаемого способа позволяет повысить экономичность с и снизить токсичность отработавших газов.


| название | год | авторы | номер документа |
|---|---|---|---|
| Способ регулирования параметров двигателя внутреннего сгорания | 1979 |
|
SU1218163A1 |
| Способ определения нестабильности вращения двигателя внутреннего сгорания | 1982 |
|
SU1099663A1 |
| Способ регулирования двигателя внутреннего сгорания | 1980 |
|
SU1280162A1 |
| Способ определения нестабильности вращения коленчатого вала двигателя внутреннего сгорания | 1982 |
|
SU1252523A1 |
| Способ регулирования двигателя внутреннего сгорания с рециркуляцией отработавших газов | 1980 |
|
SU1260548A2 |
| Способ регулирования двигателя внутреннего сгорания | 1981 |
|
SU1183703A1 |
| СПОСОБ УПРАВЛЕНИЯ ПОДАЧЕЙ ТОПЛИВА В ДВИГАТЕЛЬ ВНУТРЕННЕГО СГОРАНИЯ ПО МЕЖЦИКЛОВОЙ НЕСТАБИЛЬНОСТИ ПРОЦЕССА СГОРАНИЯ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1989 |
|
RU2029124C1 |
| Способ регулирования топливоподачи в двигатель внутреннего сгорания с впрыском бензина в впускной тракт | 1989 |
|
SU1719686A1 |
| Способ регулирования карбюраторного двигателя внутреннего сгорания | 1980 |
|
SU939801A1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ДЫМНОСТИ ОТРАБОТАВШИХ ГАЗОВ ДИЗЕЛЬНОГО ДВИГАТЕЛЯ | 2000 |
|
RU2175439C1 |
/
/Л
(Jo)
г
мин.
бвоо
то
.«i
I I I U
тчГ f
-M I I/
. - .-- T I
&т(Р)
ll
I I I Ur
f
I I/
Фиг. 5
Редактор Л.Пчелинская
Составитель В.Ищенко
Техред О.Ващишина Корректор А.Обручар
Заказ 8503/32Тираж 537Подписное
ЕНИИПИ Государственного комитета СССР
по делам изобретений и открытий 113035, Москва, Ж-35, Раушская наб., д. -4/5
Филиал ПГШ Патент, г, Ужгород, ул. Проектная, 4
| I.Авторское свидетельство СССР № 883538, кл | |||
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
