Изобретение относится к регулиро- ванию двигателей внутреннего сгорания, в частности к регулированию дви- гаталей легкого топлива, в т.ч. с форкамерно-факельным зажиганием.
Известен способ регулирования двигателя внутреннего сгорания путем измерения каждого временного интервала, вычисления текущей нестабильности вращения коленчатого вала как разности величин параметра вращения, определяемых в течение двух соседних временных интервапов, измерения нагрузки и частоты вращения коленчатого вала, определения по результатам измерения опорного уровня нестабильности, соответствующего оптимизируемому выходному параметру, вычисления разности между текущим значением и опорным уровнем нестабильности и формирования по этой разности управляющего сигнала на ее устранение ij .
Применение способа приводит к повышению экономичности двигателя и к снижению токсичности отработавших газов, но он имеет некоторые существенные недостатки. Они определяются тем, что в качестве временного интервала и в качестве параметра вращения использован период вращения коленчатого вала.
При выбранном параметре вращения нестабильность может быть определена только на установившихся скоростных режимах двигателя, а на неустановив- шихся скоростных режимах она не может быть выявлена на фоне регулярных изменений частоты вращения коленча- того вала.
При выбранном временном интервале неисправность одного из цилиндров многодилиндрового двигателя вызывает ложный сигнал нестабильности значительной величины, что снижает качество регулирования.
Цель изобретения - улучшение процесса регулирования.
С этой целью в качестве временного интервала принимают продолжительность рабочего цикла двигателя, измеряют частоту вращения в одинаковую фазу каждого цикла, определяют приращение частоты вращения за время между двумя очередными измерениями, вычисляют отношение этого приращения к продолжительности цикла и принимают его за параметр вращения.
0
5
5
30
40
45
50
55
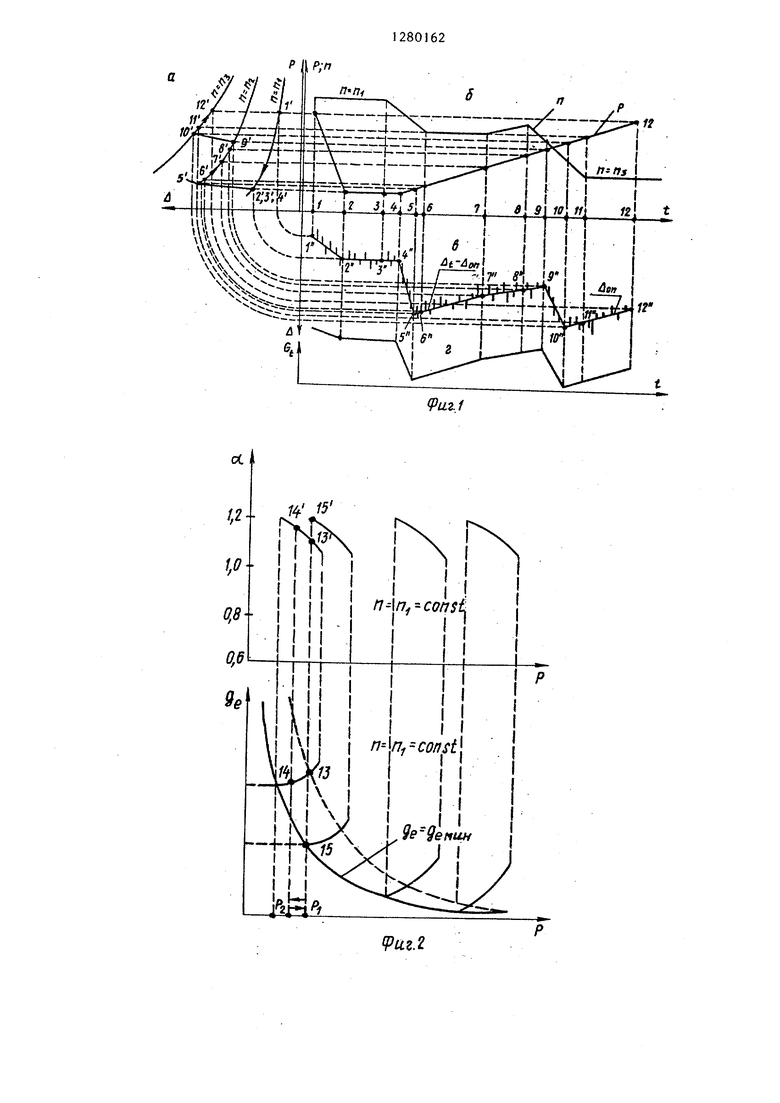
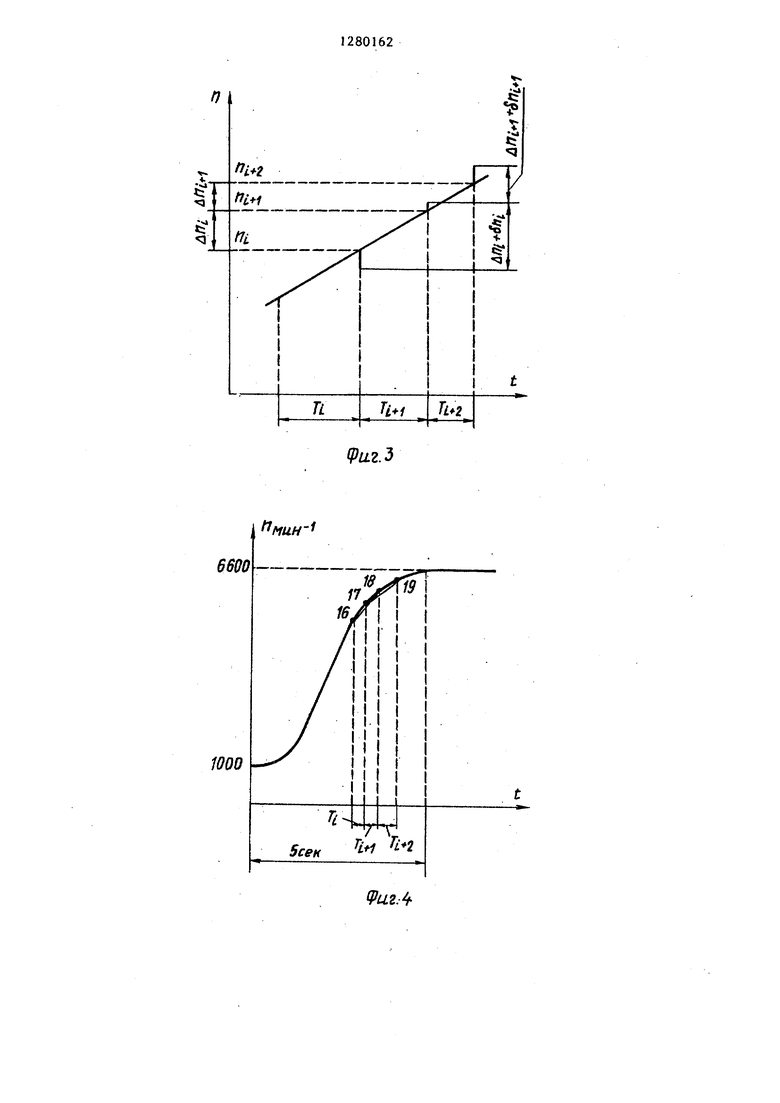
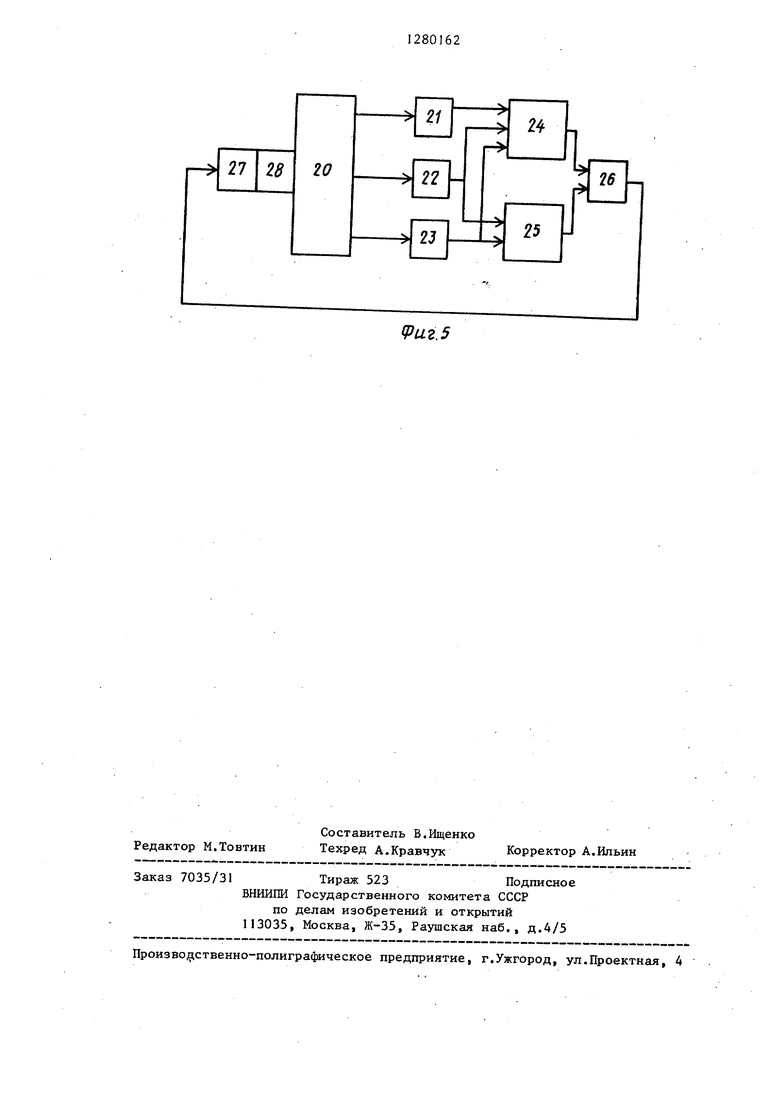
На фиг. 1 изображено в общем виде примерное семейство экспериментальных зависимостей нестабильности и, от нагрузки двигателя Р (график а), изменения частоты вращения п и нагрузки двигателя Р по времени (график S), изменение опорного уровня нестабильности ugj и разности между текущим значением нестабильности и опорным уровнем UJ оп ° времени (график ), изменение циклового расхода топлива G по времени (график 2); на фиг, 2 - зависимости коэффициента избытка воздуха oi и удельного расхода топлива gp от нагрузки двигателя Р при постоянном значении частоты вращения п п, const; на фиг, 3 - линейное изменение частоты вращения п во времени и ее приращения за счет нестабильности; на фиг. 4 - кривая . разгона двигателя и ее аппроксимация; на фиг,5 - упрощенная функциональная схема системы для рестлизации способа.
На фиг, 1-5 и в описании приняты следующие обозначения: Р - нагрузка двигателя; h - частота вращения коленчатого вала; лп - приращение частоты вращения коленчатого вала за счет регулярных изменений; 8 - приращение частоты вращения коленчатого вала за счет нестабильности; Т - продолжительность рабочего цикла двигателя; д - настабильность вращения коленчатого, вала; uj. - текущее значение нестабильности враще- ния коленчатого вала; йоп- опорный уровень нестабильности вращения коленчатого вала; G - цикловой расход топлива; gg - удельный расход топлива; ge/ - минимальный относительный уровень удельного расхода топлива; vi- - коэффициент избытка воздуха.
Способ предусматривает оптимизацию одновременно одного выходного параметра при использовании одновременно одного регулируемого параметра.
Оптимизируемыми выходными параметрами могут являться, например, относительный уровень удельного расхода топлива (экономичность), относительный уровень токсичности отработавших газов (минимизация), относительный ypoBieHb максимальной мошдости, величина коэффициента избытка воздуха с6, а в качестве регулируемых параметров могут быть использованы, например
31
цикловой расход топлива Gi, угол опережения зажигания, количество рецир- кулируемых отработавших газов,
Способ поясняется на примере оптимизации относительного уровня у-дель- кого расхода топлива gg ge,,H. соответствующего режиму эффективного обеднения смеси, регулированием циклового расхода топлива с использованием карбюратора.
Для того, чтобы обеспечить выполнение требования gg gg,,, в процессе эксплуатации двигателя добиваются его вьшолнения в процессе эксперимента и при этом получают, например семейство зависимостей U (Р) при разных фиксированных значениях частоты вращения g const при ge geMHH, (Фиг, график а),
Это семейство зависимостей реализуют в соответствующем постоянном запоминающем устройстве и по ним оп- .ределяют для текущих значений g и Р (фиг,1, график S) опорный уровень нестабильности, соответствующий оптимизируемому выходному параметру, т.е. ge 8емин. (Фиг.1, график Ь)
Вычисляют текущее значение нестабильности вращения и разность между текущим значением и опорным уровнем нестабильности й. оп (Фиг,1, график Ь) и формируют по этой разности управляющий сигнал на ее устранение .
При этом текущее значение нестабильности стремится к опорному уровню U п , а цикловой расход топлива стремится к величине, соответствую- щей этому уровню (фиг.1, график г), чем обеспечивается выполнение требования ge ge,«H.
Определение по результатам измерения нагрузки Р и частоты вращения г опорного уровня нестабильности йд„ , соответствующего оптимизируемому выходному параметру gg gg ,„ поясняется на фиг.1.
Моменты времени отмечены точками 1-12. Нагрузка Р между точками 1 и 2 убывает, между точками 2-4 сохраняется постоянной и после этого возрастает.
Частота вращения между точками 1-3 сохраняется постоянной и равной 2 2 точками 3-6 она уменьшается до величины Ч 1, между точками 6 и 7 часто та сохраняется
624
постоянной и равной 7 между точками 7 и 8 возрастает, между точками 8-11 уменьщается, а между точками 11 и 12 сохраняется постоянной и равной
Определение опорного уровня иллюстрируется построениями при помощи штриховых линий. В момент времени, отмеченный точкой 1, значение нагрузки Р проектируется на зависимость семейства. Л(Р), полученную при 1 2, , т.е. в точку l (см. . графики 5 и а ). Из точки l опускается перпендикуляр на горизонтальную ось и на графике а и полученная на этой оси точка переносится на вертикальную ось и на графике & . Из этой точки проводятся горизонтальная, а из точки 1 - вертикальная линии и на их пересечении отмечается точка 1, которая является значением
опорного уровня U,
в рассматриваемый момент времени. Аналогичные построения осуществляются в моменты времени, отмеченные точками 2,3,6, 7,1 и 12. При этом используются соответствующие зависимости семейства Л(Р), полученные при 2 ,, 7 z или Ч Ч-,,, а опорный уровень Лдп на
графике 6 отмечен точками 2, 3.
i; -7 1 1 п
0,7,11 и 12 соответственно.
Моменты времени, отмеченные точками 4,5,8,9 и 10 характерны тем, что действительные значения частоты вращения /1 не равны ни одному из значений, при которых получены зависимости семейства А(Р) на графике а . В эти моменты используют ту зависимость из семейства й(Р), которая получена при частоте вращения, ближайшей к ее действительному значению. В соответствии с этим в момент, отмеченный точкой 4, используют зависимость, полученную при ( моменты, отмеченные точками 5,8 и 9, - зависимость, полученную при а в момент, отмеченный точкой 10, - зависимость, полученную при а Значения опорного уровня До,, , полученные в эти моменты времени, отмечены на графике Ь точками 4, 5,
)/
9 и 10.
Значения опорного уровня в эти моменты времени можно получить и другими методами, например, интерполяцией.
Регулирование циклового расхода топлива применительно к карбюратору
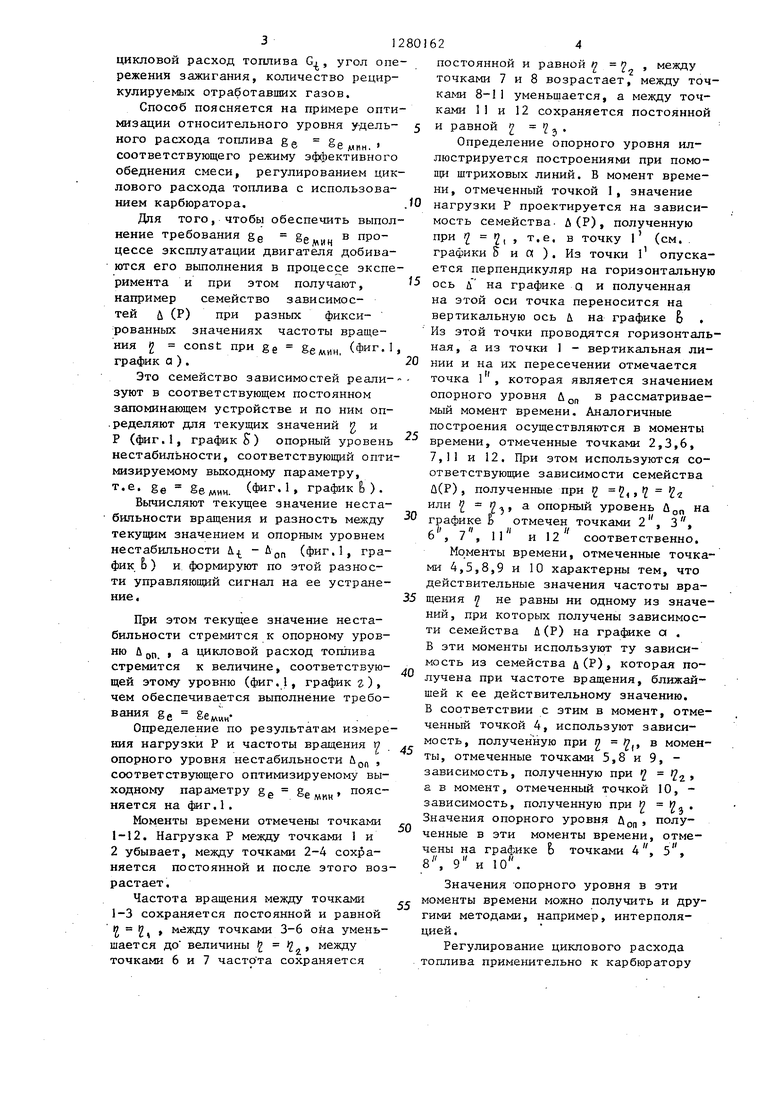
заключается в коррекхщи его работы. В этом случае (фиг.2) отработка управляющего сигнала происходит следующим образом.
При постоянном значении частоты вращения, в данном случае, например, при Ч const, изменение удельного расхода топлива gg без коррекции карбюратора осуществляется по штриховой зависимости ge(P)) изображенной в ниясней части фиг. 2, а работа карбюратора в режиме эффективного обеднения смеси, соответствующего выполнению условия gg осуществляется по сплошной кривой
ее мин
Если регулирование происходит при
постоянной нагрузке Р Р const (см.например, отрезок времени 2-3 на фиг.1), то до начала процесса регулирования удельный расход топлива gp соответствует точке 13 на нижнем графике, а величина коэффициента избытка воздуха оС , характеризующая цикловой расход топлива, соответствует точке 13 на верхнем графике фиг.2.
Оптимизация выходного параметра, т.е. вьшолнение условия g ge мин соответствует точкам 15 и 15(для определенности принято о(, 1,2).
В начале процесса регулирования, т.е. при gg, соответствующем точке 13, текущее значение нестабильности Л не равно опорному уровню &,(, , полученному для i 1, и Р Р| при соблюдешш условия gg ёемин П°э- тому по разности Л оп выра- -батывают управляющий сигнал на устранение этой разности, т.е. текущее значение нестабильности А стремится к опорному уровню UOP , полученному при ge ge
мин
и, следовательно, значение gg стремится к точке 15, а коэффициент об , характеризующий цикловой расход топлива, стремится к точке 15 .
Переход системы регулирования из точек 13 и 13 в точки 15 и 15 соответственно осуществляется через точки 14 и 14 . Объясняется это тем, что в начале отработки управляющего сигнала сразу начинается обеднение смеси„ Оно вызовет уменьпюние нагрузки, например, до значения Р Рг , а частота вращения сохранится равной 1 i пока продолжается вращение вала по инерции. Меньшей нагрузке при
постоянстве частоты вращения соответствует больший опорный уровень нестабильности д, и по меньший цикловой расход топлива G, , т.е. больший od . Предполагается, что указанные условия соответствуют точкам 14 и 14.
Когда частота вращения вала начнет падать, водитель автомобиля или другой оператор ее восстановит, и когда момент сопротивления полностью уравновесится крутяш 1м моментом, нагрузка возрастет до первоначальной величины при . Этому состоянию соответствуют точки 15 и 15. Полученный при этом цикловой расход топлива G сохраняется до очередного вычиспения текущего значения нестабильности Л и опре
on
деления опорного уровня и
При постоянстве частоты вращения и одновременном увеличении нагрузки точка, соответствующая режиму эффективного обеднения смеси, будет передвигаться по кривой ge ёемин вправо. Б этом случае опорный уровень UQ непрерывно изменяется.
При объяснении процесса отработки управляющего сигнала для случаев одновременного изменения частоты вращения и нагрузки Р должны были бы использоваться семейства зависимос- й (Ь ge() Hai(P), полученные для разных фиксированных значений 2 . Точка, соответствующая режиму эффективного обеднения смеси, будет в этом случае переходить на разные зависимости семейств g. (Р)
, .МИН
и .06 (Р).
Вычисление текущей нестабильности вращения производят следующим образом. Измеряют продолжительность каждого рабочего ци:Еа1а двигателя, например, при помощи импульсов, полученных через один в верхней мертвой точке (ВМТ) одного цилиндра, измеряют частоту вращения в одинаковую фазу калодого цикла, например, в момент получения указанных импульсов
ВМТ, определяют приращение частоты вращения за время между двумя очередными измерениями, вычисляют отношение этого приращения к продолжительности цикла и принимают его за
параметр вращения, вычисляют текущую нестабильность как разность величин параметра вращения, определяемых в течение двух соседних циклов, т.е.
в течение двух соседних временных интервалов.
Поскольку эту разность, т.е. текущее значение нестабильности, необходимо сравнивать с опорным нестабильности &„„ , являющимся положительной величиной, то она тоже должна всегда быть положительной. Поэтому ее вычисляют вычитанием меньшего значения параметра вращения из большего.
Принятая в данном способе мера нестабильности вращения позволяет при вычислении текущего значения нестабильности устранить влияние регулируемых изменений частоты вращения на неустановившихся скоростных режимах, а также влияние сравнительно низкочастотных циклических колебаний частоты вращения, наблюдаемых на установившихся скоростных режимах
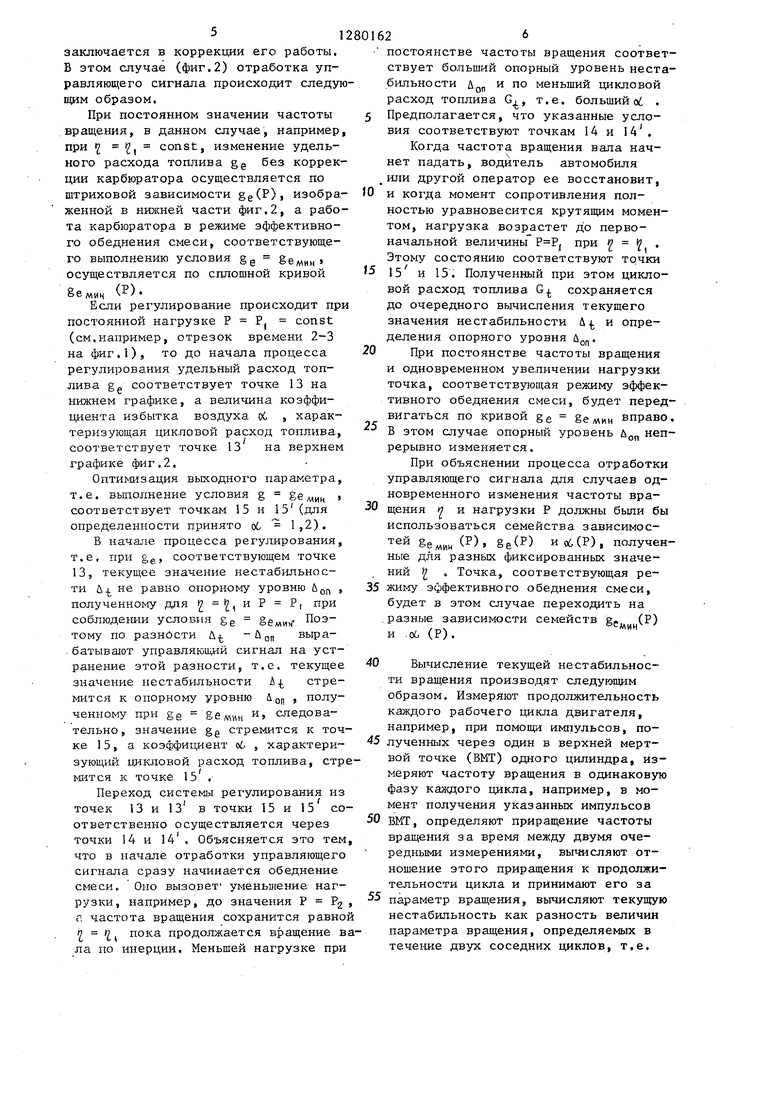
Сказанное иллюстрируется фиг. 3 и 4. В соответствии с фиг.З, на ко,-
торой показано линейное возрастание частоты вращения во времени, т.е. отражено равноускоренное вращение вала, разность величин параметра вращения , определяемых в течение двух соседних временных интервалов, равна
U2 ;+, 5 ,ч, 2; т
Л
где Т,., и Т, продолжительность двух соседних временных интервалов, за которую принята продолжи- тельность рабочих циклов; и ui ,Vi приращения частоты вращения соответственно за циклы Т -4., и Т;,.2 обусловленные регулярными изменениями, частоты вращения; и Sч. приращения частоты вращения за счет нерегулярных изменений частоты вращения соответственно за те же циклы.
Поскольку частоту вращения измеряют в одинаковую фазу каждого цикла, . то время между двумя очередными измерениями равно продолжительности цикла. Поэтому каждая дробь приведенного выражения является параметром вращения, а разность между ними, оп ределяемая в течение двух соседних интервалов, т.е. циклов, является текущим значением нестабильности вращения .
Полученное выражение можно перепи сать в виде
u2i+.
(Т,Ч2
Тн
)
ЬЧ1 - -
./ tltl С1 -.
, - , } .
If2 -t-t
Как явствует из фиг.З при лном изменении частоты вращения вая скобка обращается в нуль и тому текущая нестабильность, учвая, что при ее определении из шего вычитается меньшее, равна
2;., S lz;
Л
Т;
+ г
.
5
25
30
З, т.е. влияние регулярных изменений частоты вращения устраняется.
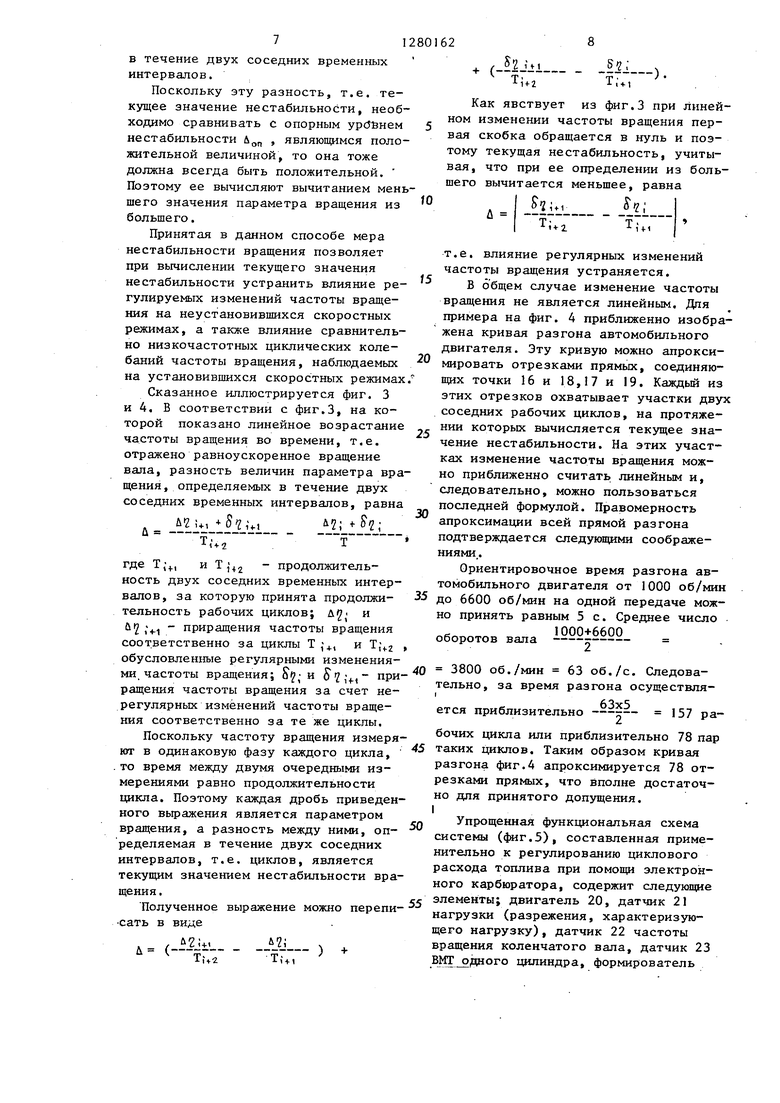
В общем случае изменение частоты вращения не является линейным. Дпя примера на фиг. 4 приближенно изображена кривая разгона автомобильного двигателя. Эту кривую можно апрокси- мировать отрезками прямых, соединяющих точки 16 и 18,17 и 19, Каждьм из этих отрезков охватывает участки двух соседних рабочих циклов, на протяжении которых вычисляется текущее значение нестабильности. На этих участках изменение частоты вращения можно приближенно считать линейным и, следовательно, можно пользоваться последней формулой. Правомерность апроксимации всей прямой разгона подтверждается следующими соображениями.
Ориентировочное время разгона автомобильного двигателя от 1000 об/мин до 6600 об/мин на одной передаче можно принять равным 5 с. Среднее число 1000+6600 2
оборотов вала
3800 об./мин 63 об./с. Следовательно, за время разгона осуществля
ется приблизительно 157 рабочих цикла или приблизительно 78 пар таких циклов. Таким образом кривая разгона фиг.4 апроксимируется 78 отрезками прямых, что вполне достаточно для принятого допущения.
I
50
55
Упрощенная функциональная схема системы (фиг,5), составленная применительно к регулированию циклового расхода топлива при помощи электронного карбюратора, содержит следующие элементы; двигатель 20, датчик 21 нагрузки (разрежения, характеризующего нагрузку), датчик 22 частоты вращения коленчатого вала, датчик 23 ВМТ одного цилиндра, формирователь
24 опорного уровня нестабильности, формирователь 25 текущего значения нестабильности, формирователь 26 управляющего сигнала, исполнительный элемент 27 карбюратора, карбюратор 28
Схема работает следующим образом.
На формирователь 25 текущего значения нестабильности поступают сигналы с датчика 22 частоты вращения и импульсы с датчика 23 ВМТ через один, причем последние стробируют сигналы датчика частоты вращения. В качестве временного интервала, используемого для вычисления текущей нестабильности, принимают интервал между двумя импульсами, поступающими с датчика ВМТ, через один, являющийся продолжительностью рабочего цикла двигателя.
Благодаря указанному выше строби- рованию, частота вращения измеряется в одинаковую фазу каждого цикла, в данном случае в момент начала рабочего хода или выпуска в одном цилиндре .
В форм1-1рователе 25 определяют при раш,ение частоты вращения за время между двумя очередными измерениями, вычисляют отношение зтого приращения к продолжительности цикла, равному времени между двумя очередными измерениями частоты вращения, и принимают ei o за параметр вращения. Текущую нестабршьность вычисляют как разность величин параметра вращения, определяемых в течение двух соседних временных интервалов, т.е. циклов, причем из большей величины вычитают меньшую.
Полученное значение текущей нестабильности поступает с формирователя
25на один из входов формирователя
26управляющего сигнала.. В формирователе опорного уровня нестабильности 24 размещено постоянное запоминающее устройство (ПЗУ), в котором реализовано семейство зависимостей
.Л(Е), полученное при соблюдении условия gg SewHH (см,фиг. 1, график а )
Считывание данньк с ПЗУ производится сигналами с датчиков 21 нагрузки и частоты вращения 22, которые также стробируются импульсами датчика 23 ВКГ, поступающими через один в формирователь 24. Таким образом, информация о частоте и нагрузке (фиг.1, график ) используется
один раз в течение каждого цикла, причем в- ту же его фазу, в которую определяют величину текущего значения нестабильности.
Полученный в формирователе 24
опорный уровень нестабильности Д.оп , соответствующий оптимизируемому выходному параметру gg ge мин (Фиг.1, график f)) , поступает на второй вход формирователя 26 управляющего сигнала.
В формирователе 26 вычисляют разность между текущим значением и опорным уровнем нестабильности й - (фиг.1, график В) и формируют по
этой разности управляющий сигнал на ее устранение.
Управляющий сигнал может формироваться, например, в виде прямоугольных импульсов с переменной скважностью. Эти импульсы поступают на исполнительный элемент 27 электронного карбюратора 28. Исполнительным элементом может являться, например, жиклер с эл ектромагнитным управлением.
Поступающие на него импульсы перекрывают (или открывают) жиклер и цикловой расход топлива G регулируется изменением скважности.
При этом цикловой расход топлива
при поступлении очередного управляющего сигнала изменяется так, что это вызывает уменьшение разности между текущим значением и опорным уровнем
нестабильности Л -й
, т.е. управляющий сигнал формируется на устранение этой разности. При этом текущее значение нестабильности Л стремится к опорному уровню Л,, , удельный расход топлива G уста-
наваливается такой величины, которая обеспечивает выполнение условия ее ее мин (фиг., график г). Скважность импульсов, полученная в результате отработки упра)зляющего сигнала
и определяющая величину G, сохраняется до формирования очередного управляющего сигнала.
Применение способа позволит повысить экономичность двигателя и снизить токсичность отработавших газов.
12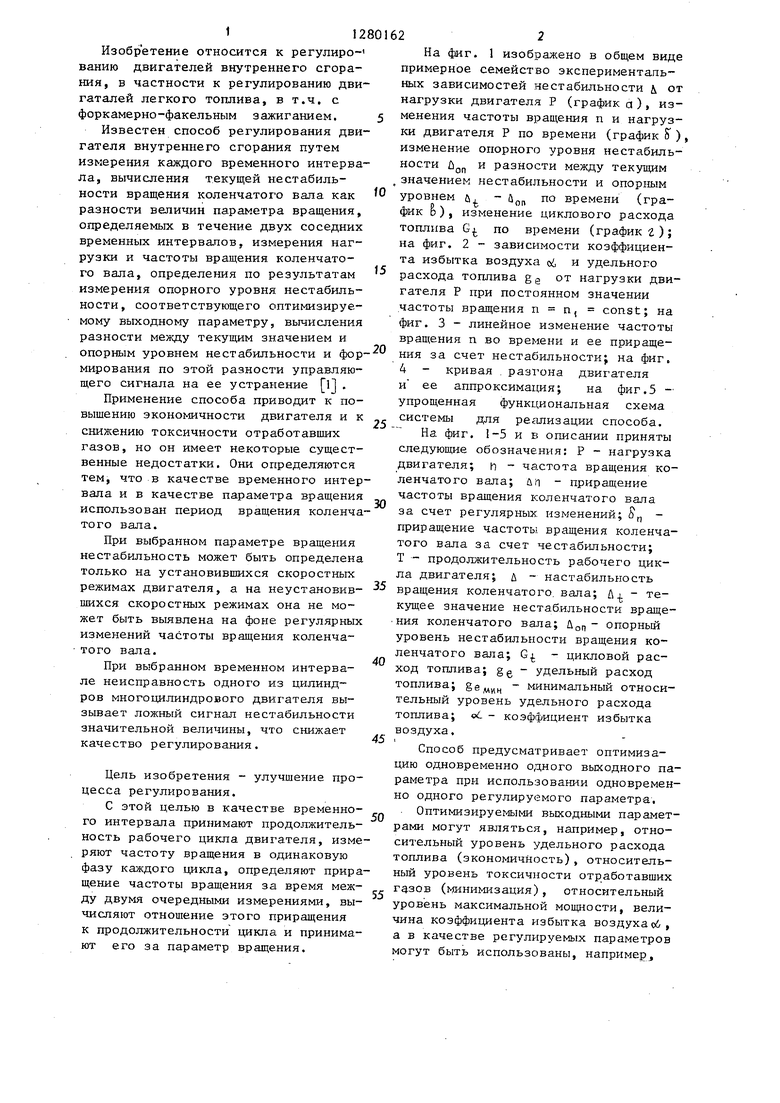

| название | год | авторы | номер документа |
|---|---|---|---|
| Способ регулирования двигателя внутреннего сгорания | 1980 |
|
SU1204765A1 |
| Способ определения нестабильности вращения двигателя внутреннего сгорания | 1982 |
|
SU1099663A1 |
| Способ регулирования двигателя внутреннего сгорания | 1981 |
|
SU1183703A1 |
| Способ регулирования параметров двигателя внутреннего сгорания | 1979 |
|
SU1218163A1 |
| Способ определения нестабильности вращения коленчатого вала двигателя внутреннего сгорания | 1982 |
|
SU1252523A1 |
| Способ регулирования двигателя внутреннего сгорания с рециркуляцией отработавших газов | 1980 |
|
SU1260548A2 |
| Способ определения нестабильности вращения коленчатого вала двигателя внутреннего сгорания | 1983 |
|
SU1126707A1 |
| СПОСОБ УПРАВЛЕНИЯ ПОДАЧЕЙ ТОПЛИВА В ДВИГАТЕЛЬ ВНУТРЕННЕГО СГОРАНИЯ ПО МЕЖЦИКЛОВОЙ НЕСТАБИЛЬНОСТИ ПРОЦЕССА СГОРАНИЯ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1989 |
|
RU2029124C1 |
| Способ регулирования карбюраторного двигателя внутреннего сгорания | 1980 |
|
SU939801A1 |
| Способ регулирования топливоподачи в двигатель внутреннего сгорания с впрыском бензина в впускной тракт | 1989 |
|
SU1719686A1 |
сХ.
fptiz.2
f flUH
ipaz.
6600
mo
Seen
Vuz.
Редактор М.Товтин
Составитель В.Ищенко Техред А.Кравчук
Заказ 7035/31 Тираж 523Подписное
ВНИИПИ Государственного комитета СССР
по делам изобретений и открытий 113035, Москва, Ж-35, Раушская наб., д.4/5
Производственно-полиграфическое предприятие, г.Ужгород, ул.Проектная, 4
(риг. 5
Корректор А.Ильин
| Авторское свидетельство СССР № 883538, кл | |||
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
