Изобретение относится к регулированию двигателей внутреннего сгорания, в частности к регулированию двигателей легкого топлива, в том числе с форкамерно-фа- кельным зажиганием.
Известен способ регулирования двигателя внутреннего сгорания путем измерения продолжительности каждого оборота коленчатого вала и нагрузки, вычисления текущего значения нестабильности как разности продолжительности двух последовательных оборотов, задания опорного уровня нестабильности по частоте вращения и нагрузке, соответствующего оптимизируемому выходному параметру, вычисления разности между текущим значением и опорным уровнем нестабильности и формирования по этой разности на неустановивщихся скоростных режимах двигателя управляющего сигнала на устранение указанной разности 1.
Применение способа обеспечивает повы- щение экономичности и снижение токсичности. Однако областью регулирования не охватываются неустановившиеся скоростные режимы двигателя и оптимизации подлежит один, заданный для данного двигателя выходной параметр.
Цель изобретения - повыщение экономичности и снижение токсичности отработавших газов путем оптимизации различных выходных параметров и расширения области регулирования.
Поставленная цель достигается тем, что, выбирают для оптимизации чередующиеся в процессе эксплуатации выходные параметры, задают для выявления скоростных режимов двигателя положительный и отрицательный пороги разности между теку- щим значением и опорным уровнем нестабильности, соответствующие выбранному оптимизируемому параметру, сравнивают с ними вычисленную разность между текущим значением и опорным уровнем нестабильности и, если эта разность в течение не ме- нее трех последовательных оборотов сохраняет знак и выходит за область, ограниченную порогами, то скоростной режим принимают за неустановившийся, определяют по нагрузке и частоте вращения вала опорные значения регулируемого параметра, соответствующие выбранному оптимизируемому параметру, и формируют по этим значениям управляющий сигнал для воздействия на исполнительный элемент регулятора, если не выполняется любое из условий результата сравнения разности между текущим значением и опорным уровнем нестабильности с упомянутыми порогами, то скоростной режим принимают за установившийся и формируют по разности между текущим значением и опорным уровнем нестабильности, соот- ветствующим выбранному оптимизируемому параметру, другой управляющий сигнал на устранение этой разности.
5
0
5
, 0 0 5
5
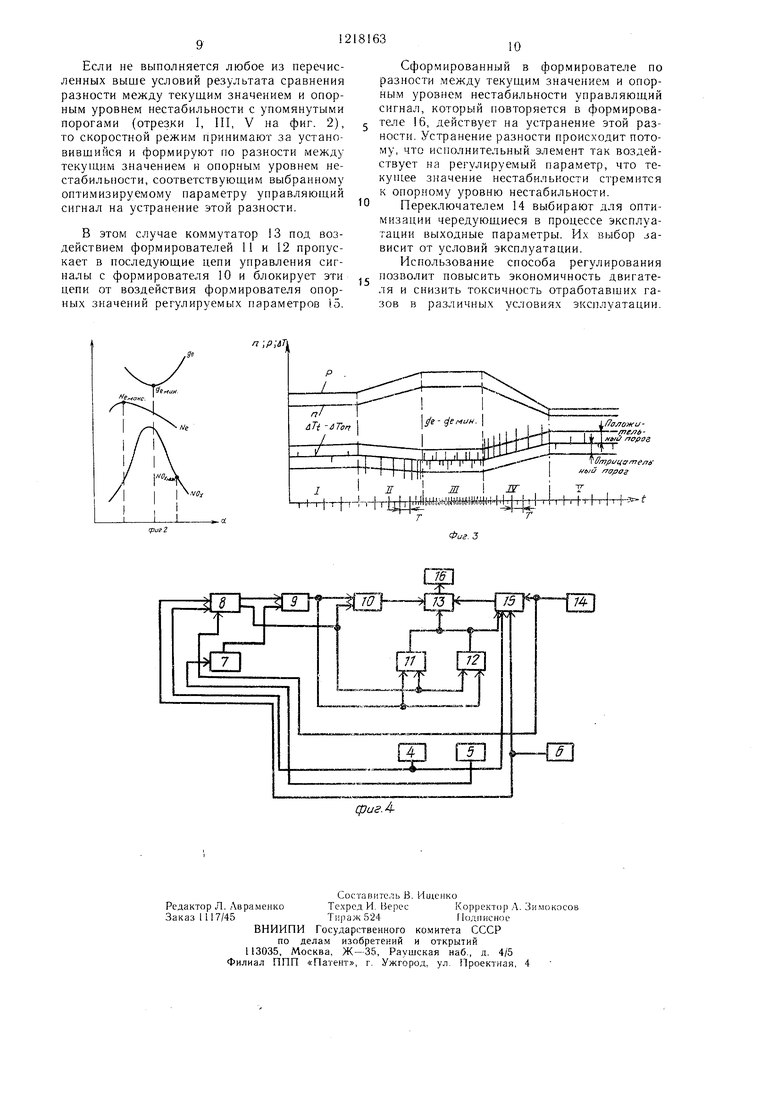
На фиг. 1 изображено семейство экспериментальных зависимостей циклового расхода топлива G( от нагрузки двигателя Р, текущие значения частоты вращения и нагрузки и опорные значения циклового расхода топлива Оь на фиг. 2 - некоторые экономические, мощностные и токсические характеристики двигателя в зависимости от коэффициента избытка воздуха а; на фиг. 3 - опорный уровень нестабильности ДТоп, разность между текущим значением и опорным уровнем нестабильности ЛТ, - АТом и пороги этой разности; на фиг. 4 - упрощенная функциональная схема системы для реализации способа,
На фиг. 1-4 и в тексте приняты следующие обозначения:
Р - нагрузка двигателя; п -частота вращения коленчатого вала; Т - продолжительность одного оборота
коленчатого вала;
ДТ - нестабильность оборотов коленчатого вала; ДТ( - текущее значение нестабильности
оборотов коленчатого вала; ДТоп -опорный уровень нестабильности оборотов коленчатого вала; а - коэффициент избытка воздуха; ge-удельный расход топлива; gc.- относительный уровень минимального удельного расхода топлива; NC - мощность двигателя; NsMaKc - относительный уровень максимальной мощности двигателя; NOx - окислы азота в составе отработавших газов;
- относительный минимальный уровень окислов азота, G; - цикловой расход топлива; Gr - количество рециркулируемых отработавших газов в процентах к их общему количеству; Q - угол опережения зажигания. Способом предусматривается оптимизация одновременно одного выходного параметра при помощи одного регулируемого параметра.
Возможна оптимизация, например, следующих выходных параметров: минимального относительного уровня удельного расхода топлива (экономичность), максимального относительного уровня мощности двигателя, минимального относительного уровня окислов азота в составе отработавших газов, величины коэффициента избытка воздуха а.
В качестве регулируемых параметров могут быть использованы, например, цикловой расход топлива G/, угол опережения зажигания в, количество рециркулируемых отра-. ботавших газов в процентах от их общего количества G,.
Для оптимизации выбирают чередующиеся в процессе эксплуатации выходные параметры. Например, (фиг. 1) при движении
автомобиля по загородному шоссе оптимизируют удельный расход топлива, добиваясь выполнения условия ge ge«,,.,, ЧТО соответ- ствует режиму эффективного обеднения смеси. Это обеспечивают, например, регулированием циклового расхода топлива G/. При изменении частоты вращения и нагрузки абсолютное значение величины ge ge««H изменяется, но в любом случае этот уровень сохраняется минимальным в данных условиях (относительный минимальный уровень). В таком же смысле являются относительными уровни и других оптимизируемых выходных параметров.
Если условия движения требуют получения максимальной мощности, то обеспечивают максимальный относительный уровень мощности Ne Ыемакс например, регулированием угла опережения зажигания Q.
При движении автомобиля по городу основным требованием является снижение токсичности, поэтому в качестве оптимизируемого выходного параметра можно принять в этом случае минимальный относительный уровень окислов азота в отрабо- тавщих газах, добиваясь выполнения условия NOx NOxMMH (минимизация) при некотором допустимом снижении мощности и экономичности (фиг. 1). Минимизация уровня окислов азота может быть обеспечена, например, регулированием рециркуляции отра- ботавщих газов.
При регулировании карбюраторного двигателя предполагается, что карбюратор сам по себе обеспечивает выполнение минимальных требований к экономическим мощност- ным и токсическим параметрам двигателя. Рассматриваемым способом производится только дополнительная корректировка регулируемых параметров для улучщения в зависимости от условий эксплуатации выходных параметров.
Процессы регулирования поясняются на примере оптимизации удельного расхода топлива, когда ее результатом является соблюдение условия ge ge«HH, причем оптимизация осуществляется регулированием циклового расхода топлива Gr, который является регулируемым параметром. При использовании в системе топливоподачи электронного карбюратора регулирование циклового расхода топлива предлагаемым способом заключается в коррекции работы карбюратора.
Регулирование на установившихся и на неустановивщйхся режимах основано на двух разных принципах. Регулирование на неустановивщйхся скоростных режимах производят по частоте вращения коленчатого вала и нагрузке, а регулирование на уста- новивщихся скоростных режимах - по нестабильности периода вращения коленчатого вала.
Процесс регулирования по нестабильности основан на том, что величина нестабильности оборотов коленчатого вала ДТ
5
при данном значении частоты вращения п и нагрузки Р при осуществлении оптимизации определенного выходного параметра, в данном случае при соблюдении условия ge gexui, однозначно зависит от значения регулируемого параметра, в данном случае от циклового расхода топлива G(.
Чтобы обеспечить выполнение условия ge ge,, в процессе эксплуатации добиваются его выполнения в процессе экспери- 0 мента. При этом, например, получают семейство экспериментальных зависимостей ДТ(р) при разных фиксированных значениях (без учета нестабильности) частоты вращения п const при соблюдении условия
ge Рсуин) . О/
Эти зависимости реализуют в постоянном запоминающем устройстве соответствующей системы регулирования и по ним определяют, т. е. задают по частоте п и нагрузке Р опорный уровень нестабильности ДТол, 0 соответствующий выбранному оптимизируемому параметру, т. е. ge .
Каждому значению ДТоп соответствует определенное значение циклового расхода топлива G/.
На установивщихся скоростных режимах по разности между текущим значением и опорным уровнем нестабильности ДТ/- ДТоп формируют управляющий сигнал на устранение этой разности, т. е. ДТ(-ДТоп является сигналом ощибки в цепи отрица- Q тельной обратной связи.
В связи с этим в установившихся скоростных режимах текущая нестабильность ДТ( стремится к опорному уровню ДТоп, а цикловой расход топлива G/ соответствует опорному уровню нестабильности, при кото- 5 ром выполняются условия оптимизации ge
0 pwll
gUMHII.
Текущее значен ;е нестабильности вычисляют как разность продолжительности двух последовательных оборотов, в связи с этим измеряют продолжительность каждого оборота коленчатого вала, так как опорный уровень нестабильности является положительной величиной, то текущее значение нестабильности тоже должно быть положительным. Поэтому при его вычислении
- из большего значения продолжительности оборота вычитают меньшее значение.
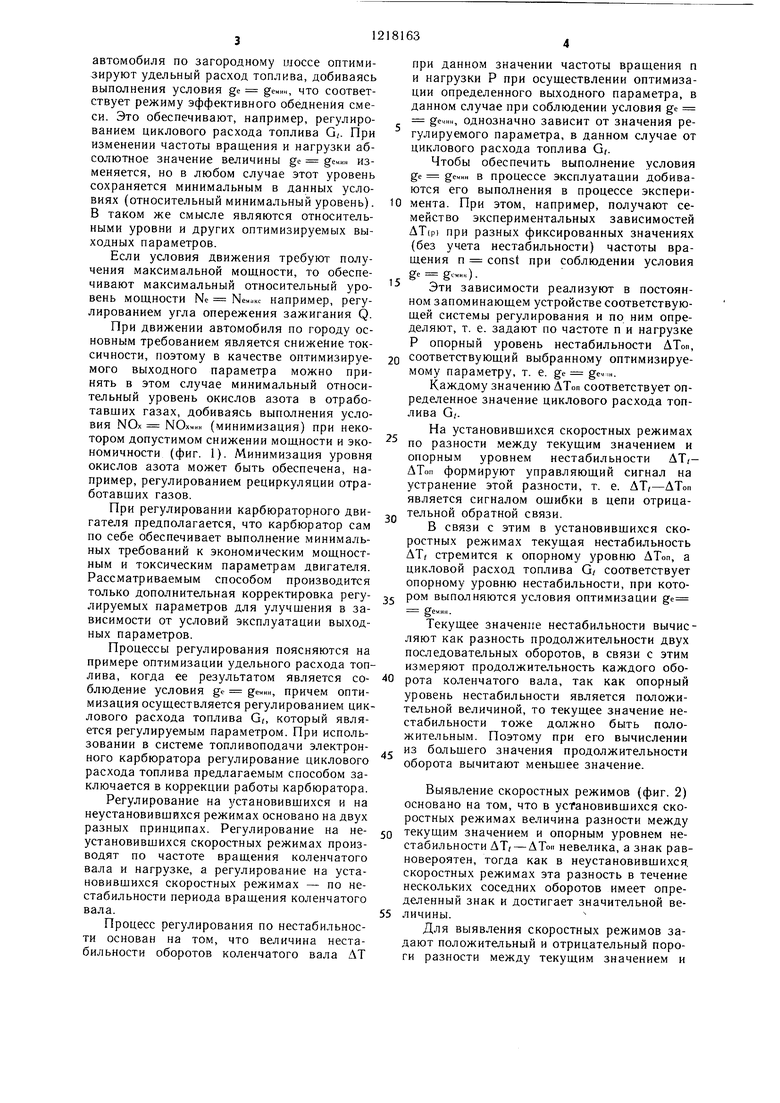
Выявление скоростных режимов (фиг. 2) основано на том, что в усгановивщихся скоростных режимах величина разности между
текущим значением и опорным уровнем нестабильности ДТ( - ДТоп невелика, а знак равновероятен, тогда как в неустановивщйхся, скоростных режимах эта разность в течение нескольких соседних оборотов имеет определенный знак и достигает значительной ве5 личины.
Для выявления скоростных режимов задают положительный и отрицательный пороги разности между текущим значением и
опорным уровнем нестабильности, соответствующие выбранному оптимизируемому параметру, т. е. в данном случае ge gc«HH.
С этими порогами сравнивают разность между текущим значением и опорным уровнем нестабильности AT/ - АТоп и, если эта разность в течение не менее трех последовательных оборотов сохраняет знак и выходит за область, ограниченную порогами (фиг. 2, участки И и IV), то скоростной режим принимают за неустановивщийся.
Если не выполняется любое из перечисленных условий результата сравнения разности между текущим значением и опорным уровнем нестабильности АТ( - АТоп с упомянутыми порогами (фиг. 2, участки I, III и V), то скоростной режим принимают за установившийся и формируют по разности между текущим значением и опорным уровнем нестабильности, соответствующим выбранному оптимизируемому параметру, управляющий сигнал на устранение этой разности.
На неустановивщихся скоростных режимах регулирование производят по частоте вращения и нагрузке, определяют по ним опорные значения регулируемого параметра, соответствующие выбранному оптимизируемому параметру, и формируют по этим значениям управляющий сигнал для воздействия на исполнительный элемент регулятора.
В рассматриваемом случае, например, для того, чтобы обеспечить выполнение условия ge В процессе эксплуатации получают в процессе эксперимента семейство зависимостей регулируемого параметра (в данном случае циклового расхода топлива G;), от нагрузки Р для разных фиксированных значений частоты вращения вала п const
при ge ge,,,,.
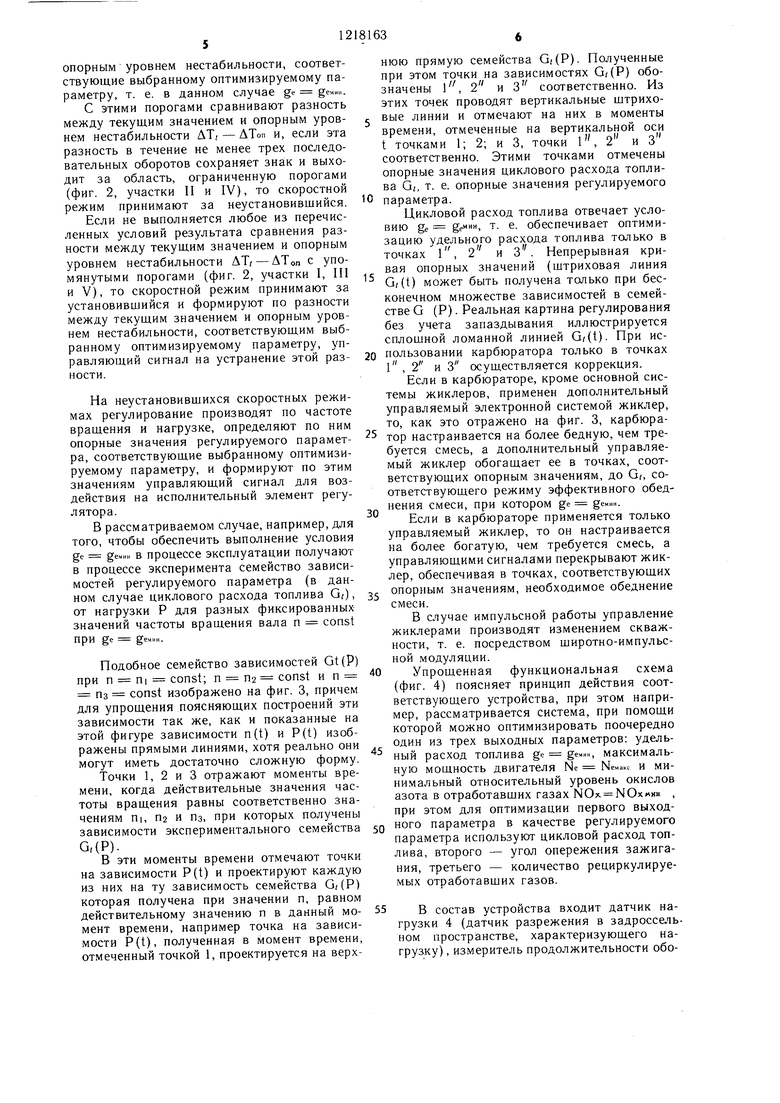
Подобное семейство зависимостей Gt(P) при п П| const; п П2 const и п пз const изображено на фиг. 3, причем для упрощения поясняющих построений эти зависимости так же, как и показанные на этой фигуре зависимости n(t) и Р(1) изображены прямыми линиями, хотя реально они могут иметь достаточно сложную форму.
Точки 1, 2 и 3 отражают моменты времени, когда действительные значения частоты вращения равны соответственно значениям П|, П2 и Пз, при которых получены зависимости экспериментального семейства G,(P).
В эти моменты времени отмечают точки на зависимости P(t) и проектируют каждую из них на ту зависимость семейства G/(P) которая получена при значении п, равном действительному значению п в данный момент времени, например точка на зависимости P(t), полученная в момент времени, отмеченный точкой 1, проектируется на верх
5
0
5
0
5
0
5
нюю прямую семейства G/(P). Полученные при этом точки на зависимостях G((P) обозначены l, 2 и З соответственно. Из этих точек проводят вертикальные щтрихо- вые линии и отмечают на них в моменты времени, отмеченные на вертикальной оси t точками 1; 2; и 3, точки l, 2 и З соответственно. Этими точками отмечены опорные значения циклового расхода топлива G(, т. е. опорные значения регулируемого параметра.
Цикловой расход топлива отвечает условию ge geM, т. е. обеспечивает оптимизацию удельного расхода топлива только в точках 1, 2 и З. Непрерывная кривая опорных значений (щтриховая линия G/(t) может быть получена только при бесконечном множестве зависимостей в семействе G (Р). Реальная картина регулирования без учета запаздывания иллюстрируется сплошной ломанной линией G/(t). При использовании карбюратора только в точках 1 , 2 и 3 осуществляется коррекция.
Если в карбюраторе, кроме основной системы жиклеров, применен дополнительный управляемый электронной системой жиклер, то, как это отражено на фиг. 3, карбюратор настраивается на более бедную, чем требуется смесь, а дополнительный управляемый жиклер обогащает ее в точках, соответствующих опорным значениям, до G(, соответствующего режиму эффективного обеднения смеси, при котором ge geM,,H.
Если в карбюраторе применяется только управляемый жиклер, то он настраивается на более богатую, чем требуется смесь, а управляющими сигналами перекрывают жиклер, обеспечивая в точках, соответствующих опорным значениям, необходимое обеднение смеси.
В случае импульсной работы управление жиклерами производят изменением скважности, т. е. посредством широтно-импульс- ной модуляции.
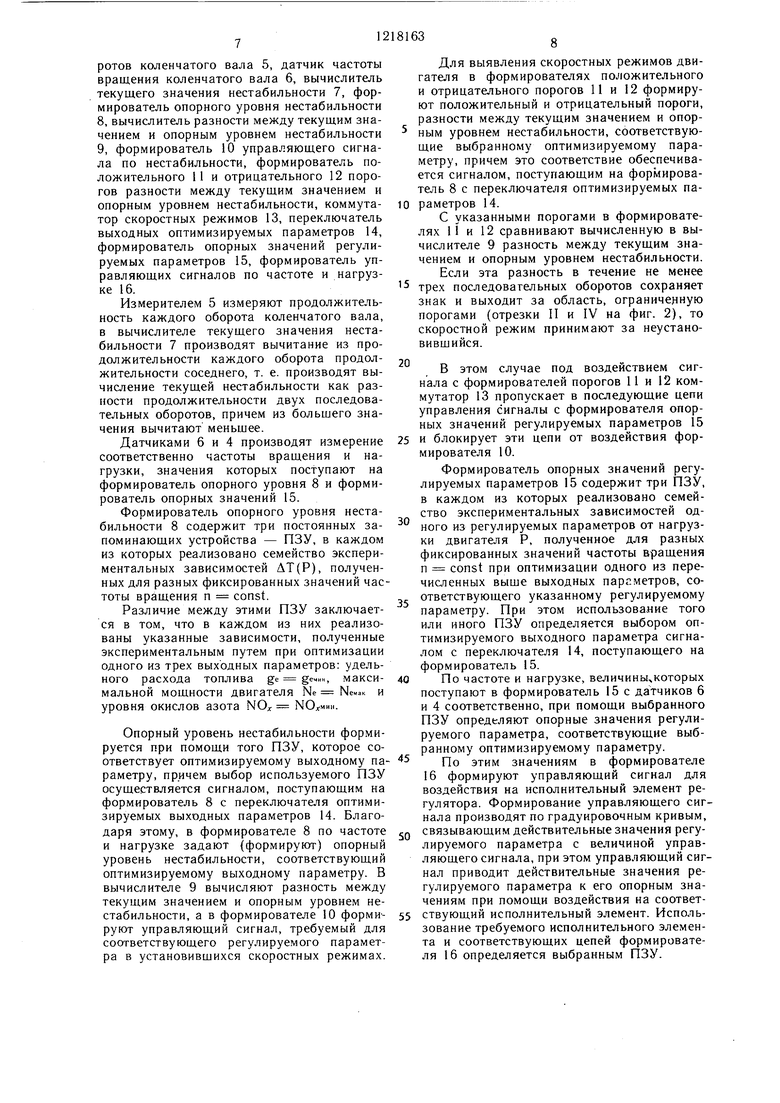
Упрощенная функциональная схема (фиг. 4) поясняет принцип действия соответствующего устройства, при этом например, рассматривается система, при помощи которой можно оптимизировать поочередно один из трех выходных параметров: удельный расход топлива ge gean,,, максимальную мощность двигателя Ne Ne«aKc и минимальный относительный уровень окислов азота в отработавших газах NOr. NOx«HH , при этом для оптимизации первого выходного параметра в качестве регулируемого параметра используют цикловой расход топлива, второго - угол опережения зажигания, третьего - количество рециркулируе- мых отработавших газов.
В состав устройства входит датчик нагрузки 4 (датчик разрежения в задроссель- ном пространстве, характеризующего нагрузку) , измеритель продолжительности обо7
ротов коленчатого вала 5, датчик частоты вращения коленчатого вала 6, вычислитель текущего значения нестабильности 7, формирователь опорного уровня нестабильности
8,вычислитель разности между текущим значением и опорным уровнем нестабильности
9,формирователь 10 управляющего сигнала по нестабильности, формирователь положительного 11 и отрицательного 12 порогов разности между текущим значением и опорным уровнем нестабильности, коммутатор скоростных режимов 13, переключатель выходных оптимизируемых параметров 14, формирователь опорных значений регулируемых параметров 15, формирователь управляющих сигналов по частоте и нагрузке 16.
Измерителем 5 измеряют продолжительность каждого оборота коленчатого вала, в вычислителе текущего значения нестабильности 7 производят вычитание из продолжительности каждого оборота продолжительности соседнего, т. е. производят вычисление текущей нестабильности как разности продолжительности двух последовательных оборотов, причем из больщего значения вычитают меньщее.
Датчиками 6 и 4 производят измерение соответственно частоты вращения и нагрузки, значения которых поступают на формирователь опорного уровня 8 и формирователь опорных значений 15.
Формирователь опорного уровня нестабильности 8 содержит три постоянных запоминающих устройства - ПЗУ, в каждом из которых реализовано семейство экспериментальных зависимостей АТ(Р), полученных для разных фиксированных значений частоты вращения п const.
Различие между этими ПЗУ заключается в том, что в каждом из них реализованы указанные зависимости, полученные экспериментальным путем при оптимизации одного из трех выходных параметров: удельного расхода топлива ge §ечин, максимальной мощности двигателя Ne Ne«aK и
уровня окислов азота NO .
Опорный уровень нестабильности формируется при помощи того ПЗУ, которое соответствует оптимизируемому выходному параметру, причем выбор используемого ПЗУ осуществляется сигналом, поступающим на формирователь 8 с переключателя оптимизируемых выходных параметров 14. Благодаря этому, в формирователе 8 по частоте и нагрузке задают (формируют) опорный уровень нестабильности, соответствующий оптимизируемому выходному параметру. В вычислителе 9 вычисляют разность между текущим значением и опорным уровнем нестабильности, а в формирователе 10 форми-- руют управляющий сигнал, требуемый для соответствующего регулируемого параметра в установившихся скоростных режимах.
18163Q
о
Для выявления скоростных режимов двигателя в формирователях положительного и отрицательного порогов 11 и 12 формируют положительный и отрицательный пороги, разности между текущим значением и опор- ным уровнем нестабильности, соответствующие выбранному оптимизируемому параметру, причем это соответствие обеспечивается сигналом, поступающим на формирователь 8 с переключателя оптимизируемых па- 10 раметров 14.
С указанными порогами в формирователях 11 и 12 сравнивают вычисленную в вычислителе 9 разность между текущим значением и опорным уровнем нестабильности.
Если эта разность в течение не менее трех последовательных оборотов сохраняет знак и выходит за область, ограниченную порогами (отрезки II и IV на фиг. 2), то скоростной режим принимают за неустано- вивщийся.
20 г
В этом случае под воздействием сигнала с формирователей порогов 11 и 12 коммутатор 13 пропускает в последующие цепи управления сигналы с формирователя опорных значений регулируемых параметров 15
25 и блокирует эти цепи от воздействия формирователя 10.
Формирователь опорных значений регулируемых параметров 15 содержит три ПЗУ, в каждом из которых реализовано семейство экспериментальных зависимостей одного из регулируемых параметров от нагрузки двигателя Р, полученное для разных фиксированных значений частоты вращения п const при оптимизации одного из перечисленных выще выходных параметров, соответствующего указанному регулируемому параметру. При этом использование того или иного ПЗУ определяется выбором оптимизируемого выходного параметра сигналом с переключателя 14, поступающего на формирователь 15.
40 По частоте и нагрузке, величиньцкоторых поступают в формирователь 15 с датчиков 6 и 4 соответственно, при помощи выбранного ПЗУ определяют опорные значения регулируемого параметра, соответствующие выбранному оптимизируемому параметру.
По этим значениям в формирователе 16 формируют управляющий сигнал для воздействия на исполнительный элемент регулятора. Формирование управляющего сигнала производят по градуировочным кривым,
5Q связывающим действительные значения регулируемого параметра с величиной управляющего сигнала, при этом управляющий сигнал приводит действительные значения регулируемого параметра к его опорным значениям при помощи воздействия на соответ55 ствующий исполнительный элемент. Использование требуемого исполнительного элемента и соответствующих цепей формирователя 16 определяется выбранным ПЗУ.
9
Если не выполняется любое из перечисленных выше условий результата сравнения разности между текущим значением и опорным уровнем нестабильности с упомянутьЕми порогами (отрезки I, III, V на фиг. 2), то скоростной режим принимают за установившийся и формируют по разности между текущим значением и опорным уровнем нестабильности, соответствующим выбранному оптимизируемому параметру управляющий сигнал на устранение этой разности.
В этом случае коммутатор 13 под воздействием формирователей 11 и 12 пропускает в последующие цепи управления сигналы с формирователя 10 и блокирует эти цепи от воздействия формирователя опорных значений регулируемых параметров 1.5.
10
Сформированный в формирователе по разности .между текущим значением и опорным уровнем нестабильности управляющий сигнал, который повторяется в формирова- теле 16, действует на устранение этой разности. Устранение разности происходит потому, что исполнительный элемент так воздействует на регулируемый параметр, что те- Kyniee значение нестабильности стремится к опорному уровню нестабильности.
Переключателем 14 выбирают для оптимизации чередующиеся в процессе эксплуатации выходные параметры. Их выбор .зависит от условий эксплуатации.
Использование способа регулирования позволит повысить экономичность двигателя и снизить токсичность отработавших газов в различных условиях эксплуатации.
п ,.
.V(7j.
I Л Ж Ж
-..,---,
Фиг. 3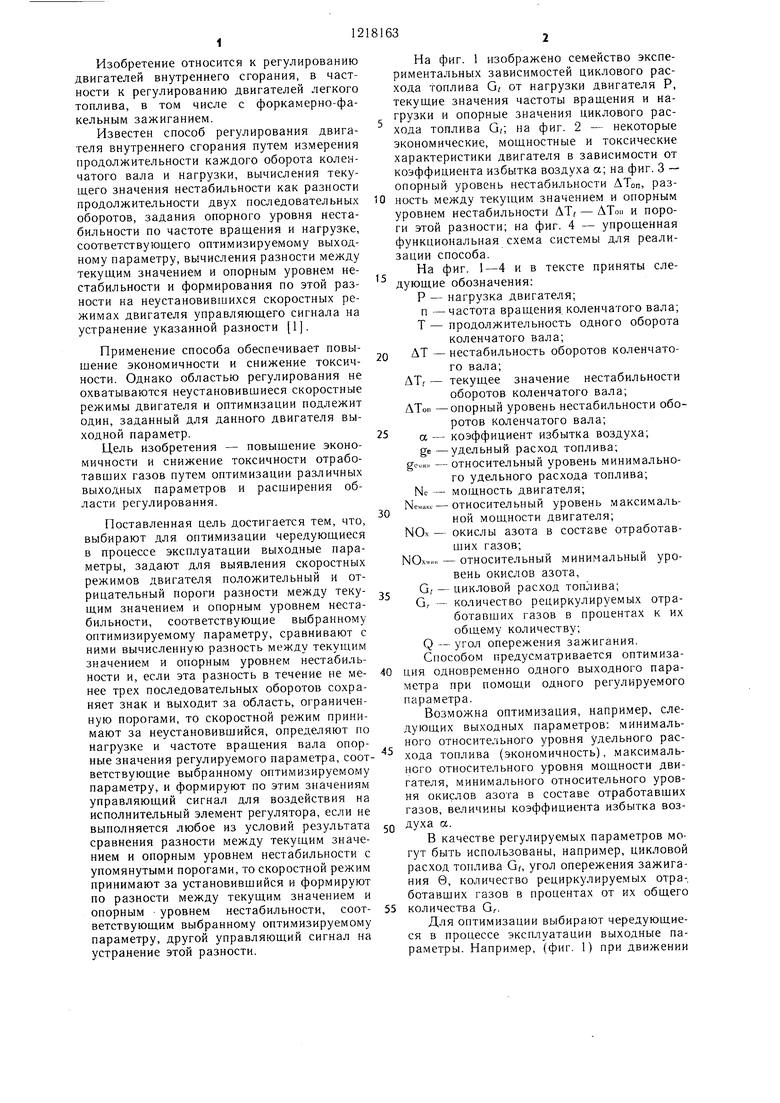
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ регулирования двигателя внутреннего сгорания | 1980 |
|
SU1204765A1 |
| Способ регулирования двигателя внутреннего сгорания | 1980 |
|
SU1280162A1 |
| Способ определения нестабильности вращения двигателя внутреннего сгорания | 1982 |
|
SU1099663A1 |
| Способ регулирования двигателя внутреннего сгорания с рециркуляцией отработавших газов | 1980 |
|
SU1260548A2 |
| Способ определения нестабильности вращения коленчатого вала двигателя внутреннего сгорания | 1982 |
|
SU1252523A1 |
| Способ регулирования двигателя внутреннего сгорания | 1981 |
|
SU1183703A1 |
| СПОСОБ УПРАВЛЕНИЯ ПОДАЧЕЙ ТОПЛИВА В ДВИГАТЕЛЬ ВНУТРЕННЕГО СГОРАНИЯ ПО МЕЖЦИКЛОВОЙ НЕСТАБИЛЬНОСТИ ПРОЦЕССА СГОРАНИЯ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1989 |
|
RU2029124C1 |
| СПОСОБ АВТОМАТИЧЕСКОГО АДАПТИВНОГО УПРАВЛЕНИЯ ЭЛЕКТРОАГРЕГАТОМ С ВЕНТИЛЬНЫМ ГЕНЕРАТОРОМ ПОСТОЯННОГО ТОКА | 2006 |
|
RU2320072C1 |
| СПОСОБ РАБОТЫ ДИЗЕЛЯ АВТОСАМОСВАЛА (ВАРИАНТЫ) | 1996 |
|
RU2108472C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ТЕХНИЧЕСКОГО СОСТОЯНИЯ ДВИГАТЕЛЕЙ ВНУТРЕННЕГО СГОРАНИЯ И ЭКСПЕРТНАЯ СИСТЕМА ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2014 |
|
RU2571693C1 |
| Авторское свидетельство СССР № 883538, кл | |||
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
