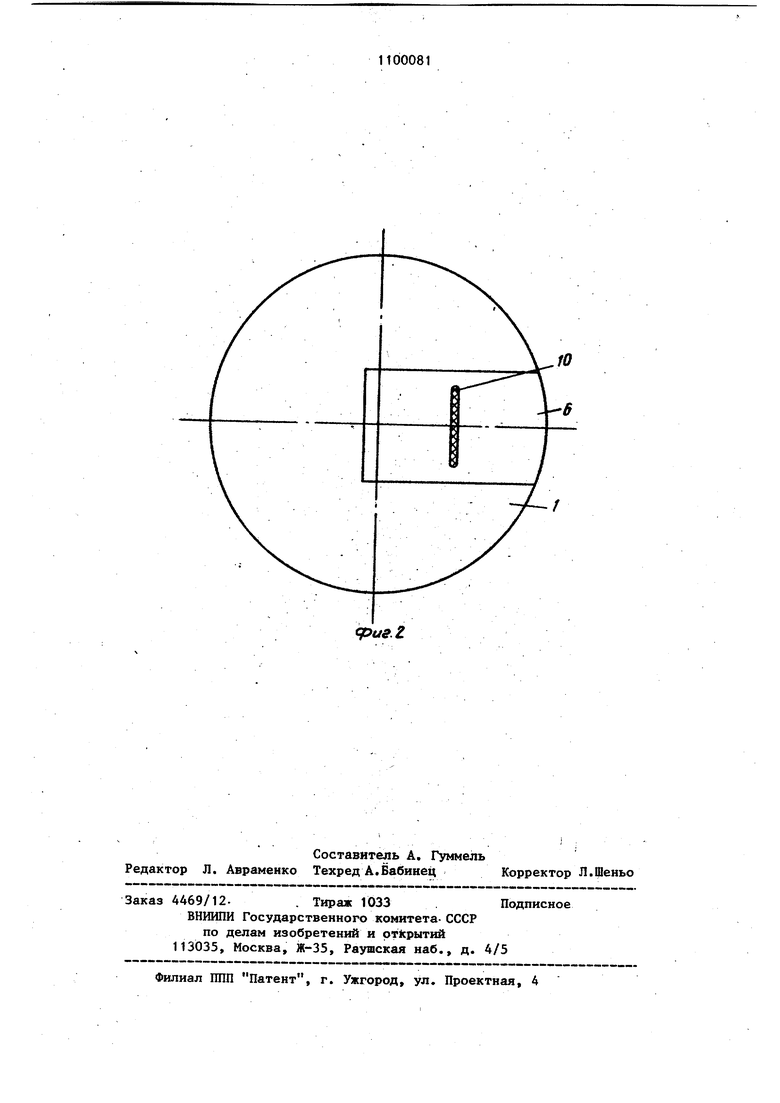
Изобретение относится к машиностроению, в частности к захватным органам манипуляторов. Известен электромагнитный захват, содеражщий корпус с проточкой на рабочей поверхности, катушку питания, размещенную в проточке корпуса, и систему управления перемещением захвата ij Недостатком известного захвата является необходимость введения дополнительного контроля количества подаваемых им заготовок- из-за возмож ности одновременного захвата несколь ких заготовок и подачи их по техноло гической цепи, обусловленная рассеянием магнитного поля и невозможност установки его порогового значения для обеспечения контроля. Наиболее б{1изким к изобретению является электромагнитный захват для плоских заготовок, содержащий корпус с проточкой на рабочей поверхности, ;катушку питания, размещенную в проточке корпуса, и систему управления перемещением корпуса 2j. Недостатком зтого устройства является возможность захвата нескольких Слипшихся заготовок и подала их в рабочую зону технологического оборудования,. обусловленное отсутствием устройства для контроля количества подаваемых им заготовок. Цель изобретения - расширение фун кциональных возможностей захвата. Цель достигается тем, что в элект ромагнитном захвате для плоских заго товок, содержащем корпус с проточкой на рабочей поверхности, катупжу питания, размещенную в. проточке корпуса, и.-систему управления перемещением корпуса, в корпусе над катушкой питания выполнен паз, между пазом и катушкой питания выполнена сквозна прорезь, здхват снабжен пластиной из немагнитного материала, установленной в пазе корпуса, и связанным с пластиной и установАенньа4 с возмож ностью перемещения вдоль оси захвата герметизированным магнитоуправляемым контактом, подключенным к системе управления. Кроме того, захват снабз1сен наполнителем из немагнитного материала, р мещенным в прорези. На фиг. 1 изображен захват, общий вид; иа фиг. 2 - то же, вид сверху. Электромагнитный захват для плоских заготовок содержит корпус 1 с проточкой 2 на рабочей поверхности 3, предназначенной для удержания заготовки А. В проточке 2 размещена катушка 5 питания. Захват связан с системой (не показана) управления перемещением его корпуса 1.г В корпусе 1 над катушкой 5 вьтолнен паз 6, а между пазом 6 и катушкой 5 - сквозная прорезь 7. В пазе 6 корпуса 1 рахмещена пластина 8 из немагнитного материала, на которой с возможностью перемещения вдоль оси захвата установлен герметизированный магнитоуправляемьй контакт 9, подключенный к системе управления перемещением корпуса 1 захвата. Кроме того, в. прорези 7 размещен наполнитель-10 из немагнитного материала. Электромагнитный захват работает следующим, образом. При подаче постоянного напряжения в KHTymKV 3 развивающиеся магнитные силы притягивают -заготовку 4 к рабочей поверхности 3 корпуса 1 и замыка- ются через нее. Часть магнитного потока проходит через прорезь 7, которая является повышенным магнитным сопротивлением и в зтом месте деформируется. Над прорезью 7 возникает рассеянгг ное магнитное поле, улавливаемое герметизированным магнитоуправляемьм контактом 9. В случае захвата двух и более заготовок 4 общее магнитное сопротивление цепи корпус 1 - заготовка 4 изменяется, а магнитный поток соответственно увеличивается. Аналогичным обрЛзом- увеличивается деформация магнитного потока над прорезью 7. Перемещая контакт 9 отно сительно корпуса 1, устанавливают необходимое расстояние между контактом 9 и прорезью 7, обеспечивающее необходимую величину сигнала, отключающего перемещение захвата через систему управления его перемещением. Изобретение позволяет расширить функциональные возможности захвата и обеспечить нормальную эксплуатацию технологического оборудования, исключив вероятность попадания двух и более заготовок в рабочую зону оборудования.
фиг. I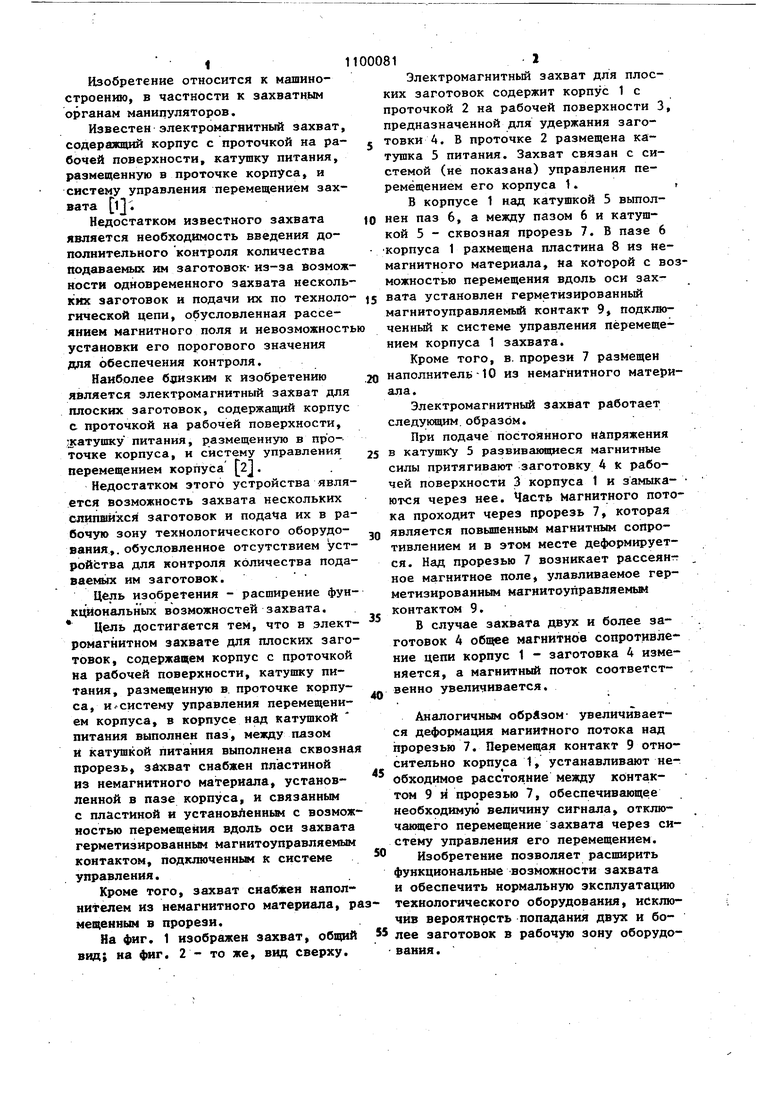
| название | год | авторы | номер документа |
|---|---|---|---|
| Электромагнитный схват | 1985 |
|
SU1306712A1 |
| Устройство для захвата листовых заготовок | 1989 |
|
SU1785895A1 |
| Автоматизированный комплекс для листовой штамповки | 1986 |
|
SU1456269A1 |
| Магнитоуправляемый контакт | 1980 |
|
SU951440A1 |
| МАГНИТОУПРАВЛЯЕМОЕ БЛИНКЕРНОЕ ТАБЛО | 1997 |
|
RU2133507C1 |
| Устройство контроля захвата листовых заготовок | 1988 |
|
SU1613320A1 |
| ЭЛЕКТРОМАГНИТНОЕ УСТРОЙСТВО ДЛЯ ПРЕДОТВРАЩЕНИЯ ЭКСПЛУАТАЦИОННЫХ ДИСБАЛАНСОВ ТОРЦОВЫХ ШЛИФОВАЛЬНЫХ КРУГОВ | 2009 |
|
RU2417149C1 |
| Электромагнитный клапан | 1991 |
|
SU1788377A1 |
| ЭЛЕКТРОМАГНИТНОЕ РЕЛЕ | 1970 |
|
SU276253A1 |
| ТРЕНАЖЕР ДЛЯ ОБУЧЕНИЯ ПРИЕМАМ ЭКСТРЕННОЙ ТРАВМАТОЛОГИЧЕСКОЙ И РЕАНИМАЦИОННОЙ ПОМОЩИ | 1993 |
|
RU2124762C1 |
1. ЭЛЕКТРОМАГНИТНЫЙ ЗАХВАТ ДЛЯ ПЛОСКИХ ЗАГОТОВОК, содержащий корпус с проточкой на рабочей поверхности, катушку питания, размещенную в проточке корпуса, и систему управления перемещением корпуса, отличающийся тем, что, с целью расширения функциональных возможностей, в корпусе над катзппкой питания выполнен паз, между пазом и катушкой питания выполнена сквозная прорезь, захват снабжен пластиной кз немагнитного материала, установленной в пазу корпуса, и связанным с пластиной и установленным с возможностью перемещения вдоль оси захвата герметизированным магнитоуправляемым контактом, подключенным к системе управления. 2. Захват по п. 1,отличаю щ и и с я тем, что он снабжен наполнителем из немагнитного матери(Л ала, размещенным в прорези.
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| ЭЛЕКТРОМАГНИТНЫЙ ЗАХВАТ КРАНА-ШТАБЕЛЕРА | 0 |
|
SU277232A1 |
| Видоизменение пишущей машины для тюркско-арабского шрифта | 1923 |
|
SU25A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Мальцевский В.В | |||
| Электромагнитные захватные органы к промышленным роботам | |||
| Сб | |||
| Промышленные работы | |||
| М., Изд-во ВЗМИ, 1980, с | |||
| Шкив для канатной передачи | 1920 |
|
SU109A1 |
