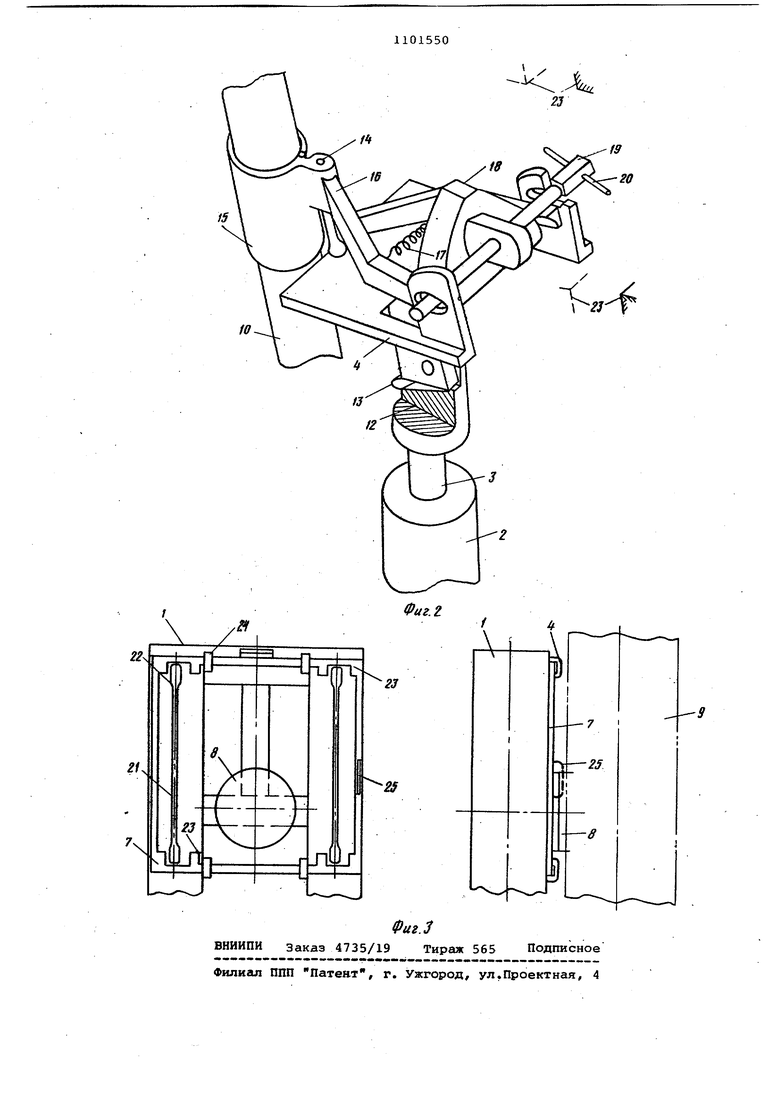
Изобретение относится к горной промышленности и может быть использовано преимущественно при производ стве буровзрывных раб.от для подачи а.арядного шланга в скважину, , Известно устройство для.подачи шла га в скважину, содержащее пневмоцилиндр с поршнем, на которых с помощ кронштейнов закреплены захваты Cl. Недостатком этого устройства является необходимость ручного управления каждым циклом захвата шланга. Наиболее близким к изобретению п технической сущности и достигаемому результату является устройство для подачи зарядного шланга в скваЖину, включающее направляющее приспособление, податчик шланга, содержащий пневмоцилиндр с поршнем и штоком и подающий захват, установленный на штоке, механизм переключения хода поршня и систему управления работой захвата С23, . Недостатком известного устройства является его малая надежность в работе из-за проскальзывания шланга в , Объясняется это тем, что зарядные шланги имеют поверхности с Малым коэффициентом трения и эллас тичные стенки. Для подачи такого шланга в скважину любым из.зажимов, основанных на принципах трения, без нарушения целостности шланга невозможно создать большие прижимные усилия, а значит, и силу подачи. Последнее приводит порой к проскальзыванию шланга в зажимах. Таким образом, устройства данного типа работают ненадежно. Цель изобретения - повышение надежности устройства в работе путем устранения проскальзывания шланга в захвате. Для достижения указанной цели в устройстве для подачи зарядного шлан га в скважину, включающем направляющее ..приспособление, податчик шпанга, содержащий пневмоцилиндр с поршнем и штоком и подающий захват, уста новленный на штоке, механизм переключения хода поршня и систему управ ления работой захвата, последний вы.полней в виде клещей с подпружиненными рычагами, ось пересечения которых ориентирована под углом к ойи пневмозарядчика, и связанной со штоком направляющей пластины, на которой за креплена ось рычагов, а система управления работой захвата выполнена в виде поворотного кулака, установле ного между рычагами, и механизма управления положением кулака, установленного на пневмоцилиндре. Кроме того, механизм управления положением кулака выполнен в виде ра кы с направляющим пазом с концевыми уширениями, парными выступами на уровне уширений, пгшьца с рукояткой, связанного с кулаком и установленного в пазу рамы с возможностью поворота в уширениях при взаимодействии рукоятки с одним из пары выступов, при этом выступы установлены на раме с возможностью поперечного перемеще::ия относительно направляющего паза, С целью регулирования усилия захвата шланга путем изменения степени его изгиба, подающий захват снабжен упругой регулирующей прокладкой, ус тановленной между торцовой поверхнодтью штока и направляющей пластиной, при этом торцовая поверхность штока выполнена наклонной относительно его оси, а направляющая пластина закреплена на штоке шарнирно. Нафиг. 1 изображено предлагаемое устройство, аксонометрия; на фиг. 2 конструкция кронштейна с захватом и механизмом автоматического регулирования, аксонометрия,-на фиг. 3 - механизм переключения хода. Устройство для подачи шланга в скважину состоит из корпуса-рамы 1, пневмоцилиндров 2 со штоками 3, направляющих пластин 4, захватов 5, системы управления работой захватов с ргшами 6 и 7 и пневмосисте1Ф1. Устройство, с помощью поворотной муфты (и каретки) 8 закреплено на стойке 9 с возможностью перемещения вдоль оси стойки и поворота на 360°. Шланг 10 для подачи взрывчатого вещества при работе размещен в захватах 5 и в скважине и направляется люнетами 11. У устройства захваты 5,и системы угфавления работой захватов поштучно смонтированы на каждой из пластин 4, причем пластины шариирно связаны со штока уш 3 пневмоцилиндров 2. Шарнирное соединение выполнено наклонным (его основание 12) и снабжено упругой регулирующей прокладкой (элементом 13), что пЬзволяет устанавливать величину наклона пластин при движении и возврат в исходное положение. Каждый из захватов 5 конструктивно выполнен в виде пружинных клещей с вертиксшьной осью. Захват состоит из лап 15, рычагов 16 и пружины 17. Ось 14 неподвижно закреплена на пластине 4. Система управления работой захватов представляет собой расположенный между рычагами 16 кулак 18, имеющий в плане затупленного клина (трапецию) и жестко закрепленный на оси 19, свободно проходящей через проушины пластины 4. Концы оси 19 (оба или один) выполнены в виде пальцев в форме равностороннего многогранника (например, квадрата) с рукояткой 20 и введены в пазы 21 корпуса-рамы 1. На концах пазов 21 созданы уширения 22. Такая конструкция позволяет при воздействии на один
из выступов внешних сил поворачивать ось 19 в расширенной части паза, а следовательно, изменять положение 18 между рычагами 16. Размещая между рычагами 16 ос-грый (меньшей по размеру) конец кулака, рычаги под действием пружины 17 сближаются и их лапы 15 размыкецотся и перестают удерживать шланг 10, Если между рычагами 16 располагается тупой конец кулака 18, то рычаги расходятся, а их лапы 15 смыкаются и держат и прижимают шлан:г 10. Подбором формы кулака 18, времени и угла поворота оси 19 в верхнем и нижнем положении штока 3 пнёвмоцилиндров 2 можно достигнуть автоматической работы захватов 5.
Рама 7 расположена на пазовой стоijpOHe корпуса-рамы 1 (со стороны повс)ротной муфты 8) и выполнена с парным выступами 23 на уровне расширенной части 22 пазов 21. Рама посредством связей 24 (например, накладок) соединена с корпусом-рамой i свободно -и имеет возможность перемещаться в направлении, перпендикулярном оси паза 21, на расстояние, равное или большее расстояния между парными выступами 23. Для передвижения рамы на не укреплена ручка 25.
Устройство работает следующим образом.
После установки в выработке стойки 9 и навески на нее предлагаемого устройства перемещают поворотную муфту 8 так, чтобы направление движения шланга 10 совпало или было близКИМ с направлением скважины. Затем пневмосистему устройства соединяют с магистралью сжатого воздуха и зарядный шланг зa вoдят в люнеты 11 и в лапы 15 захватов 5. Для этого штоки 3 пнёвмоцилиндров 2 с пластинами
4и захватами 5 поднимают в крайнее верхнее положение, а кулак 18 поворачивают так, чтобы лапы 15 захватов
5находились в разомкнутом состоянии После этого один из штоков опускают
в крайнее нижнее положение, в результате чего кулак 18 устанавливается широкой стороной между рычагами 16, лапы 15 смыкаются и шланг 10 зажимается. Тогда включают пневмосистему устройства и указанный шток пневмоцилиндра начинает перемещаться вверх, а шток второго пневмоцилиндра с пластиной и смонтированными на нем узлами - вниз. При движении штока 3, вверх мевду вертикальной осью лап 15 и шарниром пластины 4 создается плечо, в результате чего пластина отклоняется от горизонтального направления (наклоняется) и ее выступ упирается в наклонное основание 12 шарнира, а вертикальная ось лап с вертиксшьной осью пневмоцилиндра и штока образует некоторый угол. Это приводит к тому, что шланг 10 нескол
ко изгибается у лап захвата и на него, кроме сил тренкя, действует вертикальная составляющая силы подъёма, способствуя подаче шланга в скважину Вероятность проскальзывания шланга в лапах также уменьшается, а при отд отдельных углах наклона основания 12 исчезает полностью, так как силасопротивления движению шланга уменьшается из-за наклона оси лап. Выбор рационального угла наклона поверхности (основания) 12 производится экспериментально .
Когда при подъеме штока 3 пластины 4 приблизятся к верхнему положению и многогранник рси 19 войдет в расишренную часть 22 паза 21, рукоятка 20 упирается в выступ 23 и при дальнейшем движении штока поворачивает ось 19. При этом кулак 18 также поворачивается и между рычагами 16 становится тонкий конец кулака, а следовательно, лапы 15 захвата размыкйются и освобождают шланг 10.
При верхнем положении штока пневмосистема устройства автоматически J (например, с помощью золотникового узла) перераспределяет подачу сжатог |воздуха и шток 3 начинает опускаться При этом выступ оси 19 входит в паз 21 и не может вращаться, пластины 4 под воздействием упругого элемента 1 занимают горизонтальное положение, а лапы 15 захвата разомкнуты. Поэтому лапы свободно проходят вниз вдоль шланга 10 и сомкнутых лап противоположного захвата.
Когда шток 3 приблизится к нижнему положению и конец оси 19 войдет в нижшой) расширенную часть 22 паза 21, рукоятка упирается в нижний выступ 23 и при дальнейшем движении штока вниз вызывает поворот оси А9 и кулака 18 в положение, когда широкая часть кулака размешается между рычагами 16, Тогда лапы 15 смыкаются и захватывают шланг 10. Новый подъем штока 3 вызывает повторение описанных операщий и продвижение шланга в скважине.
Аналогичная работа совершается и захватом второго пневмоцилиндра. Однако дая нормальной работы устройства необходимо, чтобы при верхнем положении одного из захватов второй находился в нижнем поло«ении. В этом случае шланг 10 при работе В1сегда поддерживается зажимами и не происходит самопроизвольного его перемещения в скважине.
Если требуется опускать ишанг из скважины, то ручкой 25 передвигают раму 7 так, чтобы под рукоятку 20 оси 19 становились другие выступа 23 (например, если были в работе выступь правой стороны, то устанавливают выступы левой стороны). Тогда при
перемещении штока 3 ось 19 и кулак i8 вращаются в противоположную (по сравнению с описанным выше ходом) сторону, и замыкание лап захвата на шланге производится в верхней части устройства (у скважины), а размыкание - в нижней части, т.е. шпанг выдвигается из скважины.
Изобретение позволит повысить надежность работы податчика и исключить возможность проскальзывания в захватах шлангов различного диаметра за счет их изгиба в лапах захвата и обеспечения возможности регулирования степени изгиба шланга.

| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для разрушения горных пород | 1981 |
|
SU1006749A1 |
| Устройство для подачи зарядного шланга в скважину | 1987 |
|
SU1562447A1 |
| Устройство для установки анкерной крепи | 1982 |
|
SU1054549A1 |
| Стенд для монтажа и демонтажа шин колес грузовых автомобилей | 1989 |
|
SU1710360A1 |
| Утсановка для окраски изделий | 1975 |
|
SU651854A1 |
| УСТРОЙСТВО ДЛЯ ДРОБЛЕНИЯ НЕГАБАРИТОВ | 2020 |
|
RU2751895C1 |
| УСТРОЙСТВО ЦЕНТРИРОВАНИЯ И ЗАГРУЗКИ С УЗЛОМ ПРИЕМА И ПОДАЧИ ЧУРАКА В ЗОНУ ЦЕНТРОВКИ И МЕХАНИЗМОМ СИНХРОНИЗАЦИИ | 2008 |
|
RU2378107C1 |
| СЪЕМНИК ДЛЯ ДЕМОНТАЖА ДЕТАЛЕЙ | 1998 |
|
RU2149091C1 |
| Импульсный податчик бурового инструмента | 2015 |
|
RU2620657C1 |
| ПНЕВМОСЕКАТОР | 1999 |
|
RU2150817C1 |
1. УСТРОЙСТВО ДЛЯ ПОДАЧИ ЗАРЯДНОГО ШЛАНГА В СКВАЖИНУ, включающее направляющее приспособление, податчик шланга, содержащий пневмоцилиндр с поршнем и штокоми подающий захват, установленный на штоке, механизм переключения хода поршня и систему управления работой захвата, отличающееся тем, что, с целью повышения надежности устройст-f... ва в работе путем устранения проскальзывания шланга в захвате, последний, выполнен в виде клещей с подпружиненными рычагами, ось пересечения которых ориентирована под углом к оси пневмоцилиндра, и связанной со штоком направляющей пластины, на которой закреплена ось рычагов, а система Управления работой захвата выполнена в виде поворотного кулака,установленного между рычагами,и механизма управления положением кулака, установленного на пневмоцилиндре, 2.Устройство по п. 1, отличающееся тем, что механизм управления положением кулака выполнен в виде рамы с направляющим пазом, с концевыми уширениями, парными выступами на уровне уширений, пальца с рукояткой, связанного с кулаком и установленного в пазу рамы с возможностью поворота в уширениях при взаимодействии рукоятки с одним из пары выступов, при этом выступы ус- g тановлены на раме с возможностью по- И перечного перемещения относительно направляющего паза. 3.Устройство по п. 1, о т л и чающееся тем, что, с целью регулирования усилия захвата шланга путем изменения степени его изгиба, подающий захват снабжен упругой регулирующей прокладкой, установленной между торцовой поверхностью штока и направляющей пластиной, при этом торцовая поверхность штока выполнена наклонной относительно его оси, а направляющая пластина закреплена на сд штоке шарнирно. СП
6
Фиг.1
10
fff
20
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Выбрасывающий ячеистый аппарат для рядовых сеялок | 1922 |
|
SU21A1 |
| Устройство для подачи шланга в скважину | 1974 |
|
SU580322A1 |
