Изобретение относится к машиностроительному гидроприводу и касается средств для согласованной работы гидроцилиндров, в частности для согласования движения гидроцилиндров подачи проходческого щита.
Известна система управления согласованной работой гидроцилиндрОБ подачи, например, проходческого шита, включающая насос, подключенный к гидроцилиндрам подачи через следящие золотники, корпуса которых выполнены заодно с корпусами гидроцилиндров подачи, рабочие полости которых сообщены с рабочими полостями следящих золотников, и устройство для управления следящими золотниками, выполненное в виде привода продольного перемещения, связанного гибкой связью с подвижным элементом следящего золотника 1.
Недостатком известной системы синхронизации является ограниченность функциональных возможностей, заключающаяся в отсутствии агрегатов предварительного рассогласования гидроцилиндров, что исключает предварительный наклон плоскости синхронизации, что необходимо для осуществления направленного вождения щита.
Кроме того, гибкие связи между синхронизирующим звеном з-адающего устройства (щтоком задающего гидроцилиндра) и следящими золотниками представляют собой тросы, огибающие систему блоков. Наличие открытых контактов тросов с блоками снижает надежность системы, точность ее синхронизации, так как возможное попадание пыли и ее налипание на тросах и блоках приводит к дополнительному смещению следящих золотников на некоторую величину, которая является фактором увеличения погрешности синхронизации.
Цель изобретения - расширение функциональных возможностей и повышения надежности. Расширение функциональных возможностей заключается в обеспечении синхронной и согласованной работы указанных гидроцилиндров при перемещении проходческого щита как на прямолинейных, так и на криволинейных (в плане и в профиле) участках трассы, а также при переходах с криволинейного на прямолинейный (и наоборот) участок трассы без перенаналадок устройства.
Указанная цель достигается тем, что система управления согласованной работой гидроцилиндров подачи, например, проходческого щита, включающая насос, подключенный к гидроцилиндрам подачи через следящие золотники, корпуса которых выполнены заодно с корпусами гидроцилиндроБ подачи, рабочие полости которых сообщены с рабочими полостями следящих золотников и устройство для управления следящими золотниками, выполненное в виде привода продольного перемещения, связанного гибкой связью с подвижным элементом следящего золотника, а привод продольного перемещения устройства для управления следящими золотниками выполнен в виде подБижного в продольном направлении блока согласования, содержащего установленный с помощью сферического щарнира согласующий диск, снабженный приводом изменения его пространственного положения, расположенным на двух взаимно перпендикулярных осях и выполненным в виде подпружиненных и расположенных по окружности согласующего диска плунжеров, число которых раБно числу гидроцилиндров подачи, причем гибкие связи, связывающие плунжеры с подвижными
элементами следящих золотников, заключены в боуденовские оболочки.
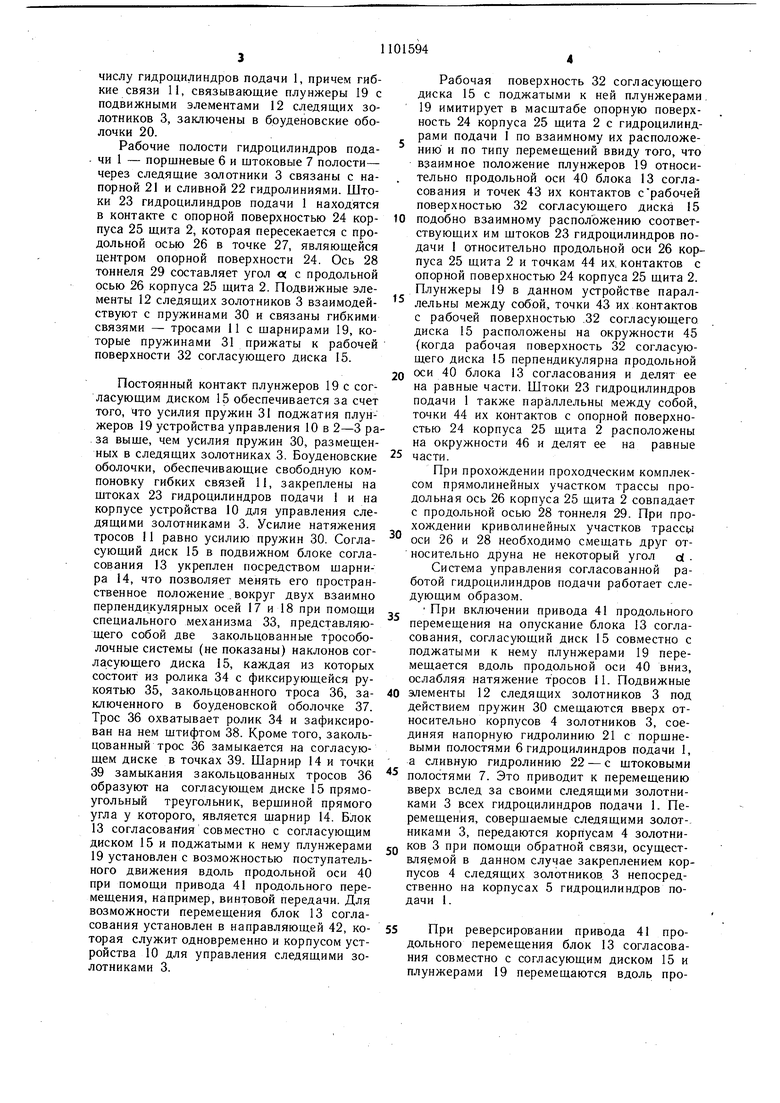
На фиг. 1 представлена система управления согласованной работой гидроцилиндров и пример его размещения на щитовом проходческом комплексе, общий вид; на
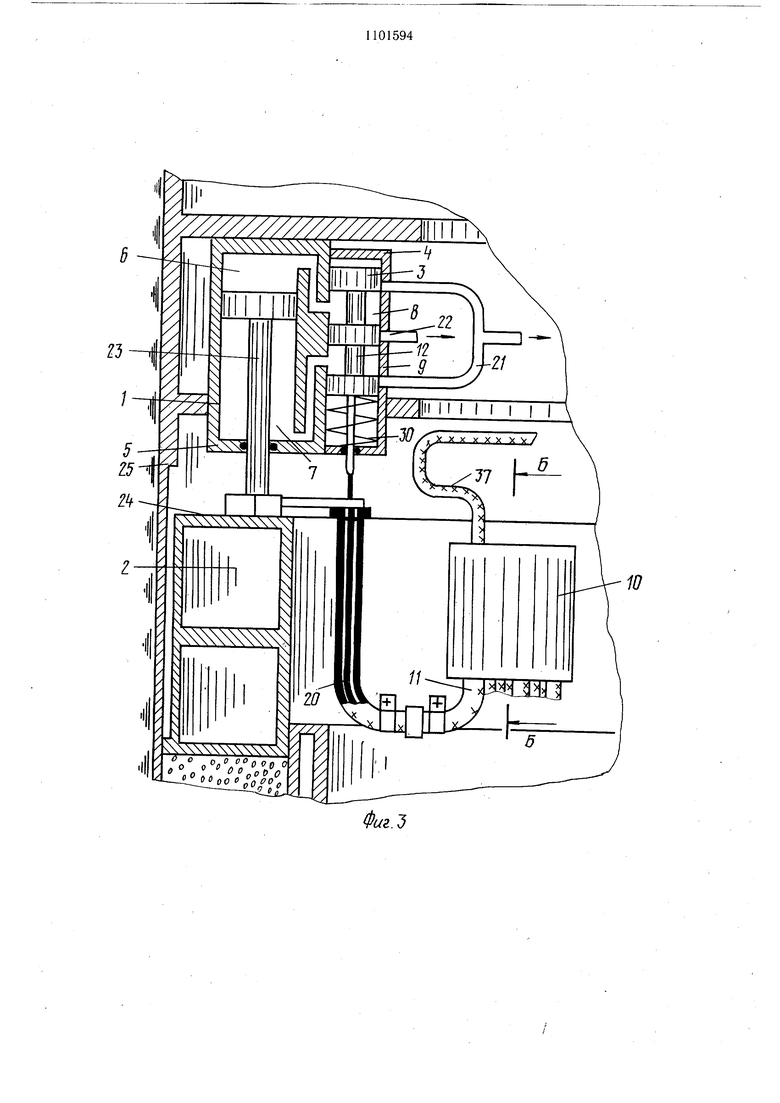
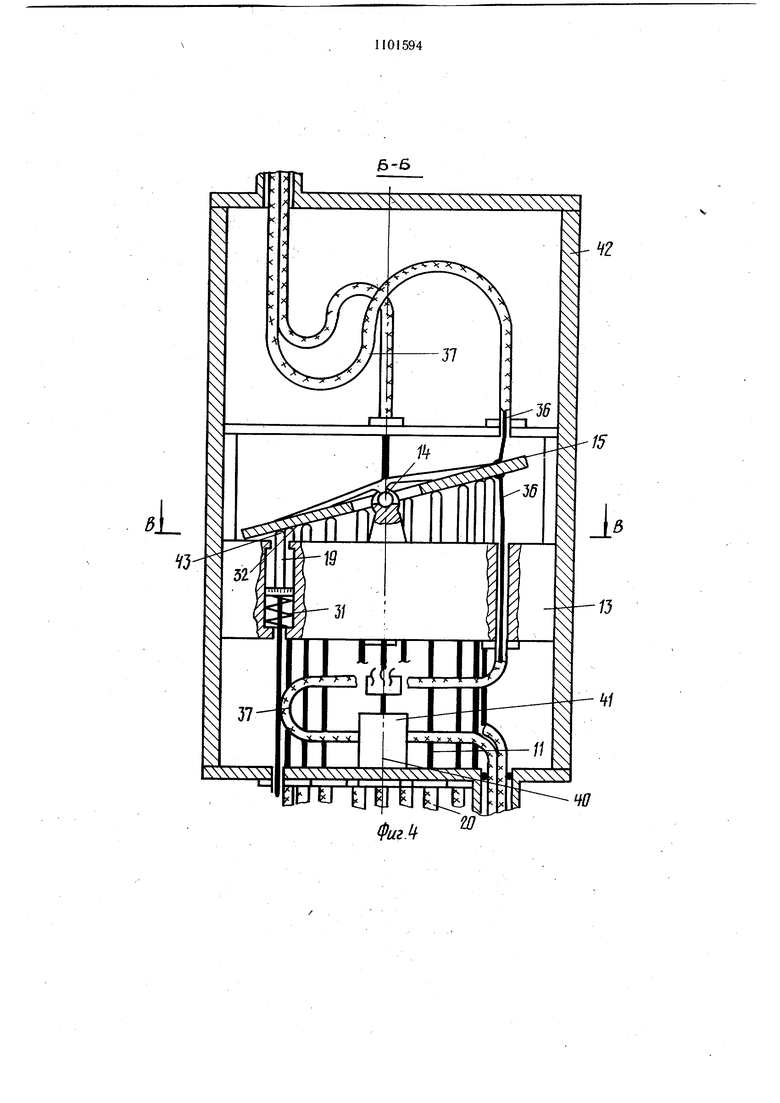
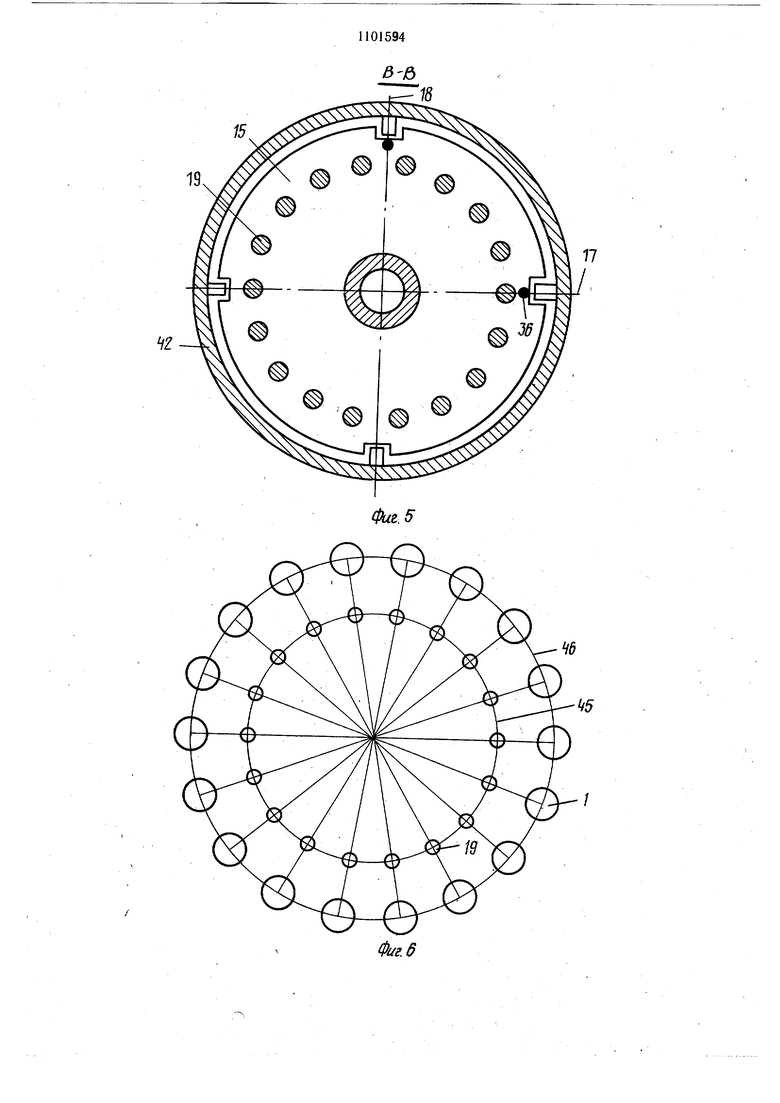
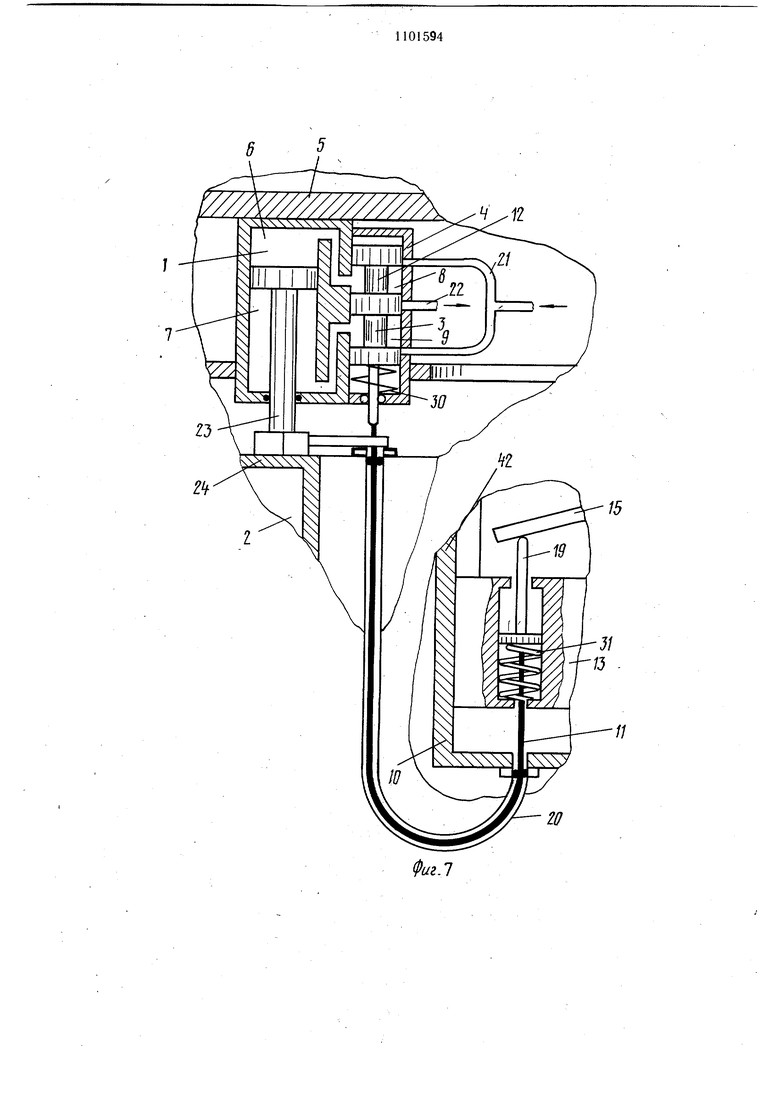
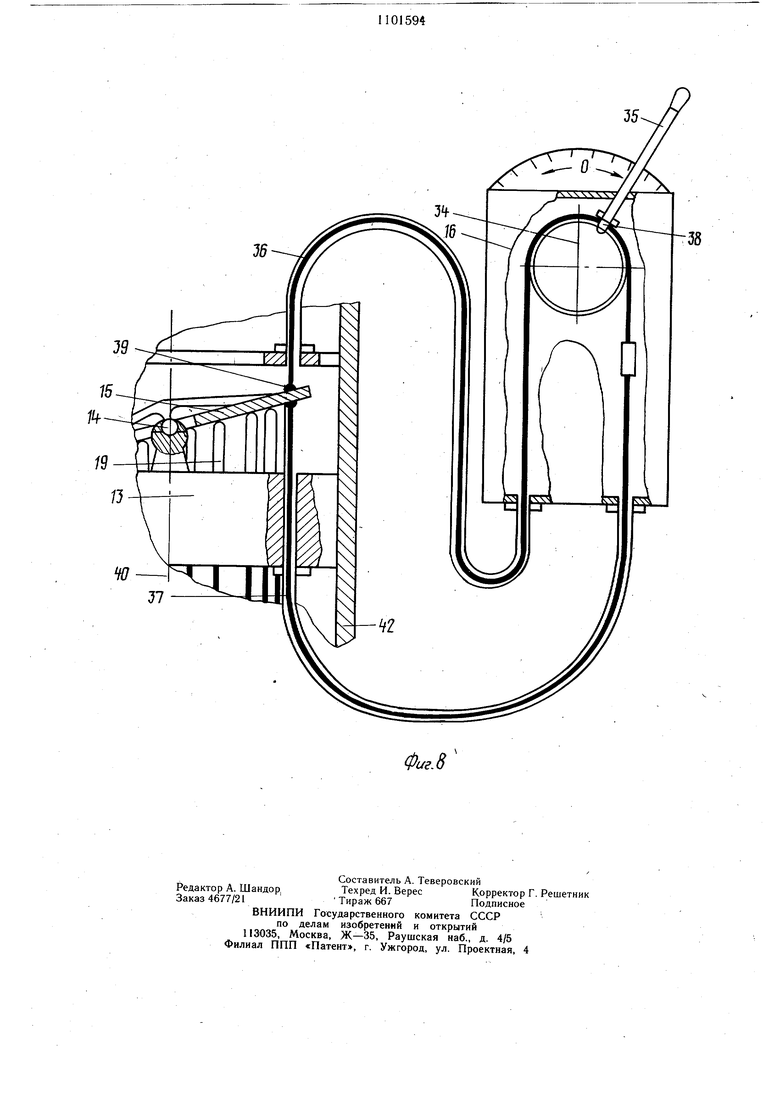
0 фиг. 2 - сечение А-А на фиг. 1; на фиг. 3 гидроцилиндр подачи со следящим золотником и его связь с устройством управления следящими золотниками, разрез; на фиг. 4 - разрез Б-Б на фиг. 3; на фиг. 5 - разрез В-В на фиг. 4; на фиг. б - взаимное положение плунжеров относительно продольной оси подвижного блока и взаимное положение штоков гидроцилиндров подачи относительно продольной оси щита (продольные оси блока и щита условно совмеQ щены); на фиг. 7 - взаимосвязь следящего золотника гидроцилиндра подачи с плунжером управляющего устройства; на фиг. 8 - пример привода изменения пространственного положения согласующего диска.
Система управления согласованной работой гидроцилиндроБ подачи 1, например, проходческого щита 2, включающая насос (не показан), подключенный к гидроцилиндрам подачи 1 через следящие золотники 3, корпуса 4 которых выполнены заодно с кор пусами 5 гидроцилиндров подачи 1, рабочие полости 6 и 7 которых сообщены с рабочими полостями 8 и 9 следящих золотников 3, и устройство 10 для управления следящими золотниками 3, выполненное в виде
J привода продольного перемещения, связанного гибкой связью, выполненной в виде троса 11 с подвижным элементом 12 следящего золотника 3. Привод продольного перемещения устройства 10 для управления следящими золотниками 3 выполнены в виде
0 , подвижного в продольном направлении блока 13 согласования, содержащего установленный с помощью сферического шарнира 14 согласующий диск 15, снабженный приводом 16 изменения его пространственного положения, расположенным на двух взаимно
5 перпендикулярных осях 17 и 18 и выполненным в виде подпружиненных и расположенных по окружности согласующего диска 15 плунжеров 19, число которых равно
числу гидроцилиндров подачи 1, причем гибкие связи 11, связывающие плунжеры 19 с подвижными элементами 12 следящих золотников 3, заключены в бруденовские оболочки 20.
Рабочие полости гидроцилиндров подачи 1 - поршневые 6 и штоковые 7 полости- через следящие золотники 3 связаны с напорной 21 и сливной 22 гидролиниями. Штоки 23 гидроцилиндров подачи 1 находятся в контакте с опорной поверхностью 24 корпуса 25 щита 2, которая пересекается с продольной осью 26 в точке 27, являющейся центром опорной поверхности 24. Ось 28 тоннеля 29 составляет угол а, с продольной осью 26 корпуса 25 щита 2. Подвижные элементы 12 следящих золотников 3 взаимодействуют с пружинами 30 и связаны гибкими связями - тросами 11 с шарнирами 19, которые пружинами 31 прижаты к рабочей поверхности 32 согласующего диска 15.
Постоянный контакт плунжеров 19 с согласующим диском 15 обеспечивается за счет того, что усилия пружин 31 поджатия плунжеров 19 устройства управления 10 в 2-3 раза выще, чем усилия пружин 30, размещенных в следящих золотниках 3. Боуденовские оболочки, обеспечивающие свободную компоновку гибких связей 11, закреплены на щтоках 23 гидроцилиндров подачи 1 и на корпусе устройства 10 для управления следящими золотниками 3. Усилие натяжения тросов 11 равно усилию пружин 30. Согласующий диск 15 в подвижном блоке согласования 13 укреплен посредством шарнира 14, что позволяет менять его пространственное положение . вокруг двух взаимно перпендикулярных осей 17 и 18 при помощи специального механизма 33, представляющего собой две закольцованные трособолочные системы (не показаны) наклонов согласующего диска 15, каждая из которых состоит из ролика 34 с фиксирующейся рукоятью 35, закольцованного троса 36, заключенного в боуденовской оболочке 37. Трос 36 охватывает ролик 34 и зафиксирован на нем щтифтом 38. Кроме того, закольцованный трос 36 замыкается на согласующем диске в точках 39. Шарнир 14 и точки 39 замыкания закольцованных тросов 36 образуют на согласующем диске 15 прямоугольный треугольник, вершиной прямого угла у которого, является щарнир 14. Блок 13 согласования совместно с согласующим диском 15 и поджатыми к нему плунжерами 19 установлен с возможностью поступательного движения вдоль продольной оси 40 при помощи привода 41 продольного перемещения, например, винтовой передачи. Для возможности перемещения блок 13 согласования установлен в направляющей 42, которая служит одновременно и корпусом устройства 10 для управления следящими золотниками 3.
Рабочая поверхность 32 согласующего диска 15 с поджатыми к ней плунжерами. 19 имитирует в масщтабе опорную поверхность 24 корпуса 25 щита 2 с гидроцилиндрами подачи 1 по взаимному их расположению и по типу перемещений ввиду того, что взаимное положение плунжеров 19 относительно продольной оси 40 блока 13 согласования и точек 43 их контактов срабочей поверхностью 32 согласующего диска 15
0 подобно взаимному расположению соответствующих им штоков 23 гидроцилиндров подачи 1 относительно продольной оси 26 корпуса 25 щита 2 и точкам 44 их, контактов с опорной поверхностью 24 корпуса 25 щита 2. Плунжеры 19 в данном устройстве парал лельны между собой, точки 43 их контактов с рабочей поверхностью .32 согласующего диска 15 расположены на окружности 45 (когда рабочая поверхность 32 согласующего диска 15 перпендикулярна продольной
Q оси 40 блока 13 согласования и делят ее на равные части. Штоки 23 гидроцилиндров подачи 1 также параллельны между собой, точки 44 их контактов с опорной поверхностью 24 корпуса 25 щита 2 расположены на окружности 46 и делят ее на равные
5 части.
При прохождении проходческим комплексом прямолинейных участком трассы продольная ось 26 корпуса 25 щита 2 совпадает с продольной осью 28 тоннеля 29. При прохождении криволинейных участков трассы
оси 26 и 28 необходимо смещать друг относительно друна не некоторый угол а( . Система управления согласованной работой гидроцилиндров подачи работает следующим образом.
При включении привода 41 продольного перемещения на опускание блока 13 согласования, согласующий диск 15 совместно с поджатыми к нему плунжерами 19 перемещается вдоль продольной оси 40 вниз, ослабляя натяжение тросов II. Подвижные
0 элементы 12 следящих золотников 3 под действием пружин 30 смещаются вверх относительно корпусов 4 золотников 3, соединяя напорную гидролинию 21 с поршневыми полостями 6 гидроцилиндров подачи I, а сливную гидролинию 22 - с штоковыми
полостями 7. Это приводит к перемещению вверх вслед за своими следящими золотниками 3 всех гидроцилиндров подачи 1. Перемещения, совершаемые следящими золот-. никами 3, передаются корпусам 4 золотниQ КОВ 3 при помощи обратной связи, осуществляемой в данном случае закреплением корпусов 4 следящих золотников 3 непосредственно на корпусах 5 гидроцилиндров подачи 1.
5 При реверсировании привода 41 продольного перемещения блок 13 согласования совместно с согласующим диском 15 и плунжерами 19 перемещаются вдоль продольной оси 40 по направляющей 42 вверх. Тросы 11, сжимая пружины 30, перемещают следящие золотники 3 вниз, соединяя напорную гидролинию 21 с штоковыми полостями 7 гидроцилиндров подачи 1, а сливную гидролинию 22 с порщневым полостями 6. Гидроцилиндры подачи 1 начнут опускаться вниз. Таким образом, корпусы 5 гидроцилиндров подачи 1 синхронно следуют за своими следящими золотниками 3, отслеживая их движение с той же амплитудой, частотой и формой, с какой соверщают эти движения следящие золотники 3. Если рабочая поверхность согласующего диска 15 перпендикулярна продольной оси 40 блока 13 согласования, то будет перпендикулярной, продольной оси 26 щита 2 и опорной поверхности 24 корпуса 5 щита 2, поскольку положение следящих золотников 3, а следовательно, и гидроцилиндров подачи 1-определяется положением согласующего диска 15. В этом случае ось 28 тоннеля 29 и ось 26 корпуса 25 щита 2 совпадают. При повороте фиксирующейся рукояти 35 горизонтального наклона, например, по часовой стрелке, ролик 34, увлекая за собой трос 36, перемещает его относительно боуденовской оболочки 37. Поскольку закольцованный трос 36 замыкается на согласующем диске 15 в точке 39 и связан с ним, то перемещение троса 36 приводит к на.клону согласующего диска 15 относительно оси 18 в щарнире 14. Плунжеры 19, находящиеся по левую сторону от оси 18, начнут опускаться вниз, а плунжеры 19, находящиеся по правую сторону - вверх. Относительная скорость перемещения плунжеров 19 различна. Чем дальще отстоит плунжер 19 от оси 18, тем его скорость- перемещения выще. Скорость пере.мещения плунжеров 19, совпавших с осью 18, равна нулю, и они не получают смещения. Благодаря гибким связям 11, заключенным в боуденовские оболочки 20, идентичные перемещения получают и следящие заолотники 3, установленные на гидроцилиндрах подачи 1. Следящие золотники 3, находящиеся по левую сторону от оси 26 корпуса 25 щита 2, перемещаются вверх, а следящие золотники 3, находящиеся по правую сторону - вниз с теми же скоростями, что и плунжера 19. Эти движения отслеживаются корпусами 4 гидроцилиндров пОдачи 1. Происходит смещение, равнодействующей усилий гидроцилиндров подачи 1, и продольная ось 26 корпуса 25 щита 2 отклоняется влево от продольной оси 28 тоннеля 29 на угол Л. При повороте фиксирующейся рукояти 21 горизонтального наклона против часовой стрелки корпус 25 щита 2 аналогично поворачивается вправо относительно продольной оси 28 тоннеля 29. Таким образом, в процессе наклона согласующего диска 15 гидроцилиндры подачи 1 воздействуют на опорную поверхность корпуса 25 щита 2 согласованно, т. е. выдвигаются и втягиваются со скоростями и амплитудой, задаваемой движением согласующего диска 15. Для отклонения продольной оси 26 корпуса 25 щита 2 от продольной оси 28 тоннеля 29 вверх или вниз используется заколь.. цованная трособлочная система вертикального наклона, при помощи которой можно наклонять согласующий диск 15 относительно оси 17 блока 13 согласования. Система наклона относительно оси 17 работает аналогично системе наклона относительно оси 18. Наличие в предлагаемое устройстве согласующего диска 15, к рабочей поверхности 32 которого поджаты плунжеры 19 по числу гидроцилиндров подачи 1, соединенные посредством гибких связей 11 с соответствующими следящими золотниками 3,, которые управляют выдвижением гидроцилиндров подачи 1, позволяет применить настоящее устройство для направленного вождения щита 2 в забое, так как, меняя пространственное положение согласующего диска 15, согласованно переместятся системы плунжер 19- гибкая связь 11 - следящий золотник 3 и, отслеживая перемещения подвижных элементов 12 своих следящих золотников 3, гидроцилиндры подачи 1 согласованно воздействуют на корпус щита 2, что приводит к его повороту в направлении, задаваемом согласующим диском 15. Согласованное воздействие гидроцилиндров подачи 1 на корпус щита 2 достигается тем, что взаимное положение щтоков гидроцилиндров подачи 1 относительно продольной оси корпуса щита 2 подобно взаимному положению поджатых к рабочей поверхности согласующего диска 15 плунжеров 19 относительно продольной оси блока 13 согласования. Таким образом, направленное вождение щитового комплекса сводится к управлению пространственным положением согласующего диска 15, что обеспечивается, например, двумя закольцованными трособлочными системами горизонтального и вертикального наклона. В щитах с монолитно-прессованной обделкой аналогично можно управлять движением прессующего кольца, что повысит качество обделки ввиду того, что возврастает удельное давление прессования бетонной смеси, поскольку при согласованной работе гидроцилиндров можно использовать полную равнодействующую их усилий, направив ее вдоль продольной оси тоннеля. Дополнительным преимуществом предлагаемого устройства является возможность использования его совместно с лазерным визиром на базе серийно выпускаемого про-, мыщленностью лазера. Их совместное применение позволит осуществить автоматическое управление движением щита в требуемом направлении. В этом случае сигналы с системы автоматического контроля поступают в логическое устройство, которое, управляя приводами изменения пространственного положения согласующего диска 15, выводит щит 2 на заданный курс. При совместной работе лазера и устройства для
согласованной работы гидроцилиндров подачи 1 проходческого щита 2 логическому устройству необходимо выдавать сигналы управления лишь на приводы наклона согласующего диска 15 относительно двух осей- 17 и 18, а не на каждый гидррцилиндр подачи 1, число которых составляет в среднем около 20-25 штук.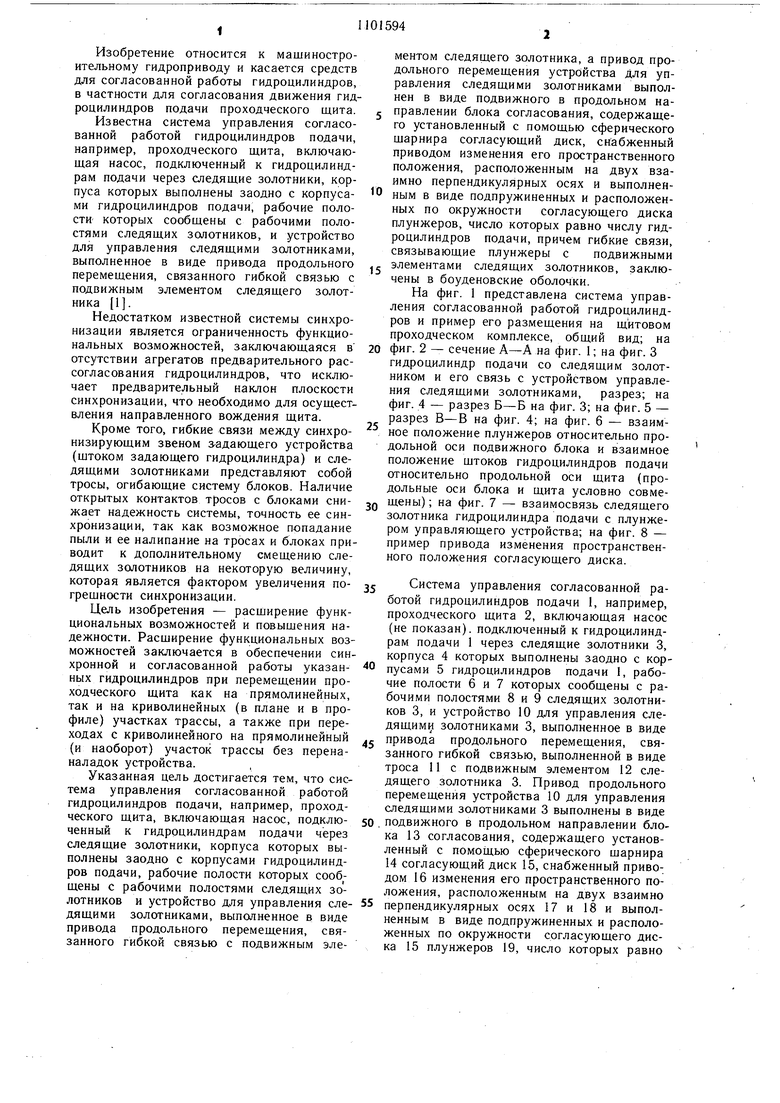
| название | год | авторы | номер документа |
|---|---|---|---|
| МЕХАНИЗИРОВАННЫЙ ЩИТОВОЙ КОМПЛЕКС ДЛЯ СООРУЖЕНИЯ ТОННЕЛЕЙ СО СБОРНОЙ ОБЖАТОЙ В ПОРОДУ ОБДЕЛКОЙ | 1988 |
|
RU2018677C1 |
| ТОННЕЛЕПРОХОДЧЕСКИЙ ЩИТ | 1992 |
|
RU2057940C1 |
| Гидравлическое копир-устройство проходческого щита | 1980 |
|
SU937725A1 |
| Плоскошлифовальный станок | 1982 |
|
SU1065151A1 |
| Исполнительный орган проходческого щита | 1975 |
|
SU569717A1 |
| Устройство для разгрузки и перемещения элементов крепи | 1990 |
|
SU1830418A1 |
| Устройство для управления проходческим щитом | 1988 |
|
SU1559174A1 |
| Манипулятор | 1975 |
|
SU547195A1 |
| ТОННЕЛЕПРОХОДЧЕСКИЙ КОМПЛЕКС | 1992 |
|
RU2043504C1 |
| Система управления манипулятором | 1980 |
|
SU884997A1 |
СИСТЕМА УПРАВЛЕНИЯ СОГЛАСОВАННОЙ РАБОТОЙ ГИДРОЦИЛИНДРОВ ПОДАЧИ, например, проходческого щита, включающая насос, подключенный к гидроцилиндрам подачи через следящие золотники, корпуса которых выполнены заодно с корпусами гидроцилиндров подач, рабочие полости которых сообщены с рабочими полостями следящих золотников, и устройство для управления следящими золотниками, выполненное в виде привода продольного перемещения, связанного гибкой связью с подвижным элементом следящего золотника, отличающаяся тем, что, с целью расщирения функциональных возможностей и повыщения надежности, привод продольного перемещения устройства для управления следящими золотниками выполнен в виде подвижного в продольном направлении блока согласования, содержащего установленный с помощью сферического щарнира согласлующий диск, снабженный приводом изменения его пространственного положения, расположенным на двух взаимно перпендикулярных осях и выполненным в виде подпружиненных и расположенных по окружности согласующего диска плунжеров, число которых равно числу гидроцилиндров подачи, причем гибкие связи, связывающие плунжеры с подвижными элементами следящих золотников, заключены в боуденовские оболочки. СП :о N lHat
Фиг.г
fc.J
.L
V/7
Фиг.
15
19
Фиг 5
46
/.///////////// . Л
г1+
20
Фиг.8
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| 0 |
|
SU402689A1 | |
| Прибор для нагревания перетягиваемых бандажей подвижного состава | 1917 |
|
SU15A1 |
