1
Изобретение относится к лесозаготовительной технике и может быть использовано на лесозаготовительных машинах, а также в устройствах для погрузочно-разгрузочных работ,5
Известны манипуляторы, например, лесозаготовительной машины, включающие шарнирно-сочлененную стрелу, каждое звено которой имеет следяший привод в виде трособлочной системы, гидроцилиндра и следи- 10 шего золотника, и задающий орган, геометрически подобный стреле.
В этих манипуляторах, однако, совмещение в золотниках указанных двух функций ухудшает возможность регулировки чувствитель- 15 ности и коэффициента усиления следящих систем, кроме того, золотники установлены в зоне, опасной для обслуживания и подверженной ударам сучьев, обломков дерева и т. п.
Целью изобретения является облегчение 20 регулировки и технического обслуживания манипулятора, повышение надежности его работы.
Это достигается тем, что каждый следящий привод стрелы снабжен регулятором чув- 25
ствительности и су 4мируюшим устройством, выполненным в виде двуплочег-о рычага, шарнирно-соединенного с регулятором чувствительности при ПОМОБ1И кулисы, шарнирно-связанной в свою очередь при помощирштнка с хвостовиком плунжера следящего золотника, причем на одном плече двуплечего рычага суммирующего устройства установлены два блока, соединенные трособлочной системой с задающим органом и стрелой, а другое плечо имеет ролик, подвижно установленный в кулисе. При этом регулятор чувствительности следящего привода выполнен в виде расположенного в корпусе ходового винта с гайкой, которая шарнирно соединена с кулисой и установлена в корпусе с возможностью возвратно-поступательного перемещения вдоль его продольной оси при помощи ходового винта.
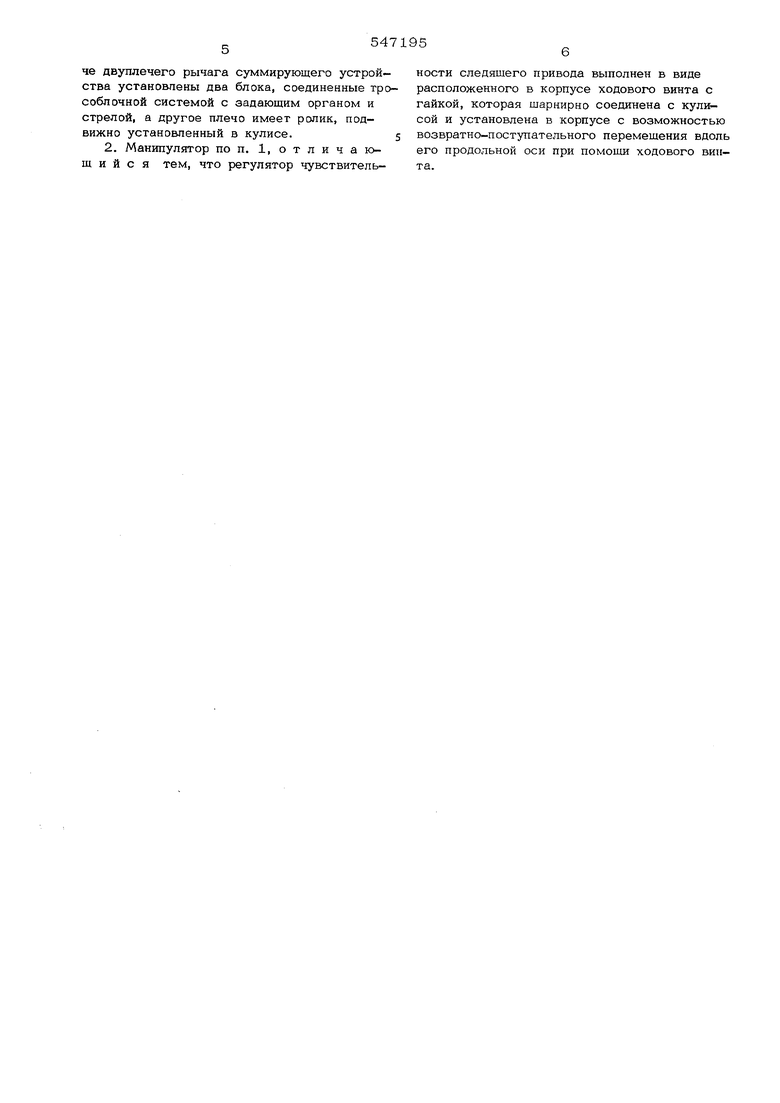
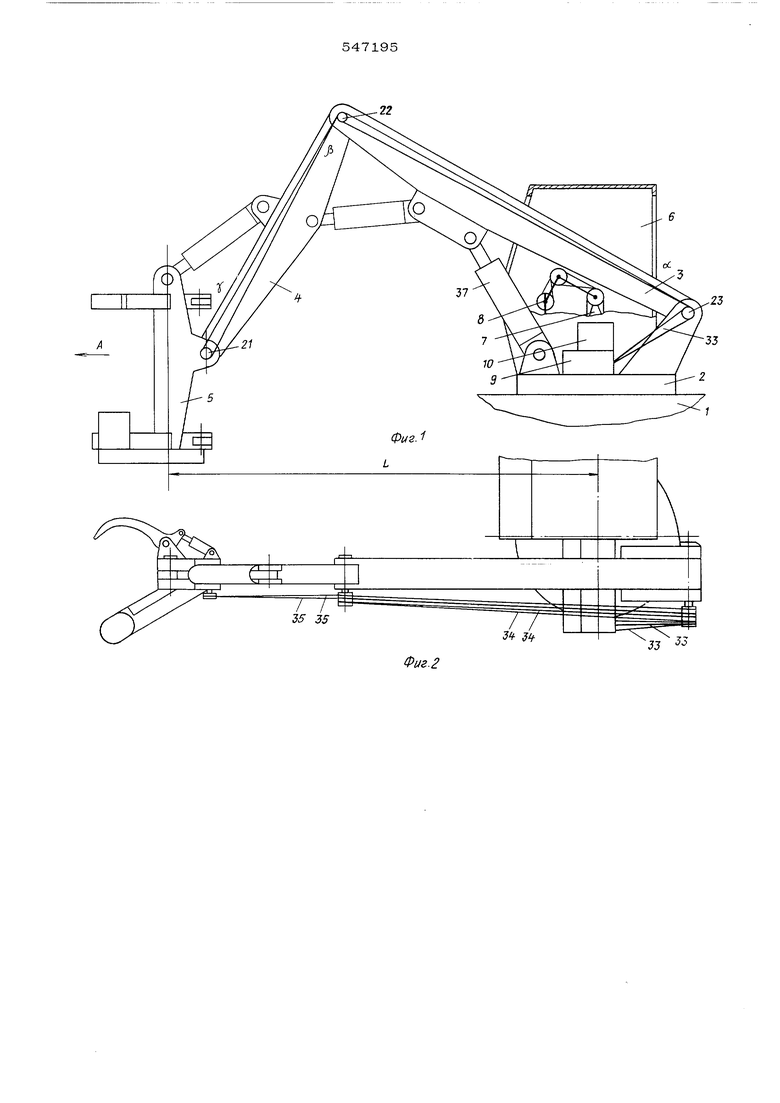
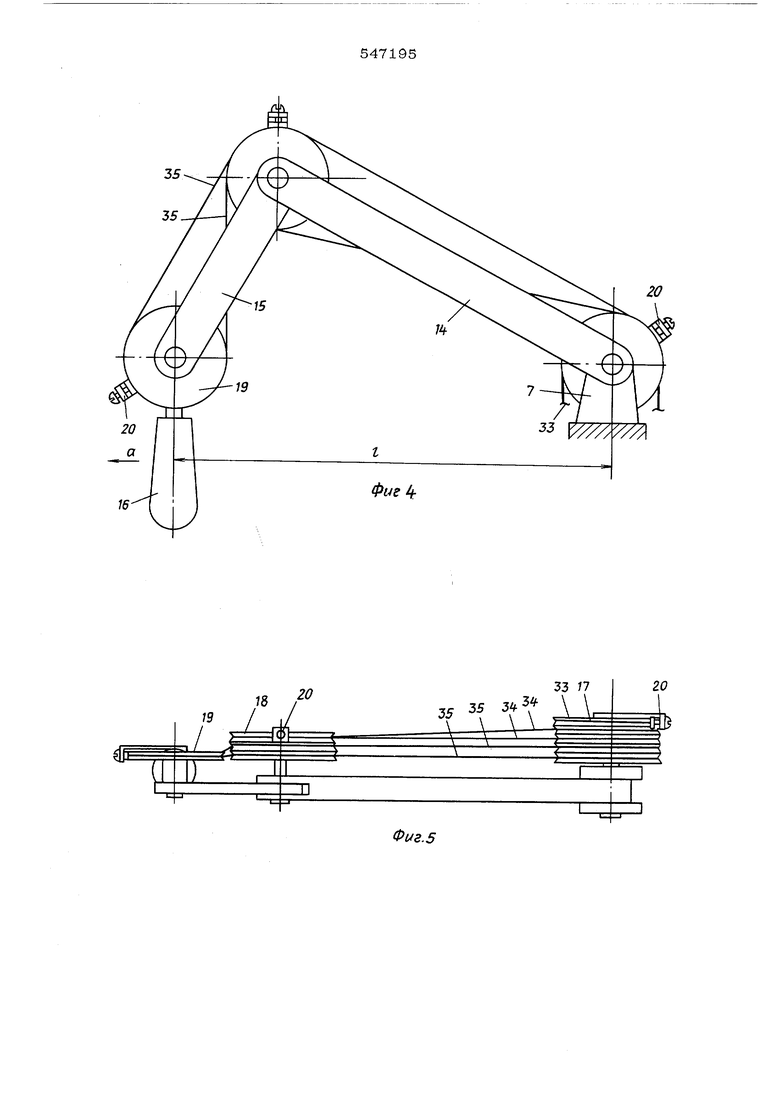
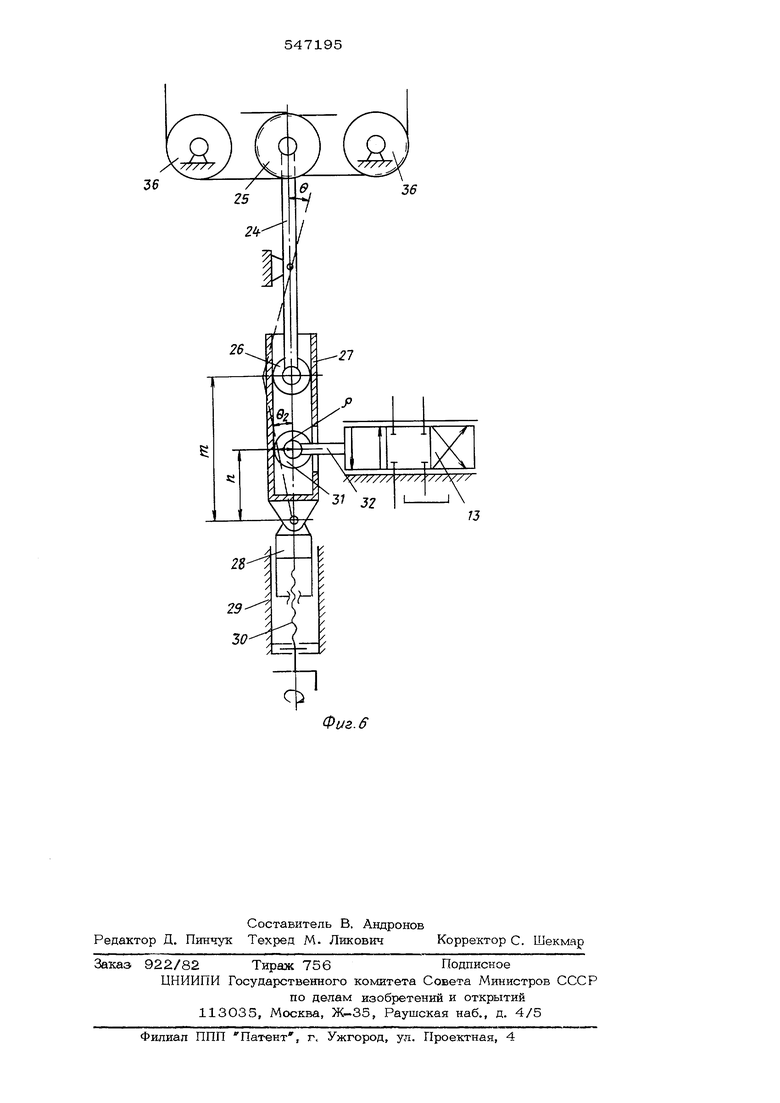
На фиг. 1 схематически изображен манипулятор, вид сбоку; на фиг, 2 - то же, вид сверху; на фиг, 3 - схемы трех суммирующих устройств со следящими золотниками и трособлочной системой; на фиг, 4 - задающи орган, вид сбоку; на фиг, 5 - то же, вид сверху; на фиг. 6 - схема суммируюшего устройства с регулятором чувствительности. Мандшупятор установлен на раме 1 самоходной песаза1 отовительной мамшны посредствеМ поворотной nnaix opMbi 2 и включает шарыирно-сочпененную стралу 3, рукоять 4 и стойку 5 захватно-срезающего устройства В кабине 6 на основании 7 установлен задающий орган 8, являющийся геометричес - КИМ подобием манипулятора. На поворотной платформе 2 установ„т;ено устройство 9 для натя :ения тросов, а под кож тсом 10 - три суммирующ1-1х устройства 11 с регуляторами чувствительности 12 и следящими золотника ми 13. Задающий орган 8 предстаи1яет собой совокупность шарни.рно-сочлененных звеньев 14, 15, и 16, на осях которых установлены жестко блоки 17, 18 и 19 с устройствами 20 фиксации тросов и свободно-остальные блоки (устройства для фиксации тросов на блоках 21, 22, 23 условно не показаны). Суммирующее устройство 11 представляе собой двуплечий рычаг 24, на одном конце которого свободно установлены два бло- ка 25, а на другом - ролик 26, расположен ный в Кулисе 27, шарнирно-связанной с гайкой 28 регулятора чувствительности 12 Гайка 28 соверщает возвратно-поступательное движение в корпусе 29 при повороте хо дового винта 30, В кулисе 27 установлен ролик 31, свободно закрепленный в хвостови ке 32 плунжера слеД5гшего золотника 13. Мсш-шулятор включает в себя три самостоятельных следящих прквода для управления стрелой 3., рукоятью 4 и стойкой 5. В соот Бэтстаки с этим в состав трособлочной сиотемы входят три бесконе шых троса: 33 - сле ,1яиего привода стрелы, 34 - рукояти, 35 - стэйки„ В трособло грюй системе предусмотрена установка ряда блоков 36 для требуемого из менения направления тросов. Работает манипулятор следующим образом Предположим, что необходимо подать стойку 5 вперед по стрелке А нарасстояние L с сохракекием ее вертикального положения. Это обеспечивается поворотом стре лы 3 на угол ot , рукояти 4 -- на угол р , стойки 5 - на угол - Ъ Оператор пе земешает звено 16 задающего органа 8 вперед по стрелке на расстояние t KU , где К - коэйзфкциент геометрического подо бкя между задающим органом и манищлятором. При этом звено 14 задающего органа 8 и его блок 17 поворачиваются на уголоС, натягиЕйя правую ветвь троса 33 и отпуская его левую ветвь. Учитывая, что трос 33 жестко закреллек на блоке 23, оси блоков 36 жестхо связаны с кожухом 1О, а момент поворота стрелы больще, чем момент поворота рычага 24, последний повернется вокруг своей оси на угол 0, а трос 33 будет пе- ремеииться вверх. С поворотом рычага 24 на угол Э кулиса 27 повернется вокруг своей оси на угол Qn, переместив плунжер следящего золотника 13 на расстояние р влево. При этом поток жидкости распределится по полостям гидроцилиндра 37 таким образом, что стрела 3 будет поворачиваться, отслеживая- уголоСи поворачивая блок 23. С поворотом блока 23 правая (нижняя) ветвь троса 33 будет натягиваться, левая (верхняя) отпускаться. Соответственно натягивается вниз трос 33, и верхний конец рычага 24 будет возвращаться в исходное положение. При этом возвращаются в исходное положение кулиса 27 и хвостовик 32 плунжера следящего золотника 13. Когда стрела 3 повернется на угол оС , плунжер золотника придет в нейтральное положение, заперев обе полости гидроцилиндра 37. Аналогично работают и другие следящие системы манипулятора. При необходимости регулировать чувствительность следящсих приводов оператор поворачивает ходовой винт 30, перемещая гайку 28 вверх или вниз. При этом изменяется соотнощение плеч m и П и чувствительность следящего привода. Установка суммирующих устройств и регуляторов чувствительности единым блоком в месте, удобном для обслуживания и безопасности от ударных воздействий оучков, кусков дерева позволит облегчить регулкров-ку и техническое обслуживание манипулята ра, повысить надежность его работы, а так же снизить себестоимость заготовленной древесины. Формула изобретения 1. Манипулятор, например лесозаготовительной мащины, содержащий шарнирно сочлененную стрелу, каждое звено которой имеет следящий привод в виде трособлочной системы, гидроцилиндра и следящего золотннка, и задающий орган, геометрически подобный стреле, отличающийся тем, что, с целью повыщения надежности работы, каждый следящий привод стрелы снабжен регулятором чувствительности и суммирующим устройством, выполненным в виде двуплечего рычага, щарнирно-соединенного с регулятором чувствительности при помонш кулисы, шарнирно-связанной в свою очередь при помощи ролика с хвостовиком плунжера следящего золотника, причем на одном пае-
че двуплечего рычага суммирующего устройства установлены два блока, соединенные трособлочной системой с задающим органом и стрелой, а другое плечо имеет ролик, подвижно установленный в кулисе.5
2. Манипулятор по п. 1, отличающийся тем, что регулятор чувствительности следящего привода выполнен в виде расположенного в корпусе ходового винта с гайкой, которая шарнирно соединена с кулисой и установлена в корпусе с возможностью возвратно-поступательного перемещения вдоль его продольной оси при помощи ходового вип- та.

| название | год | авторы | номер документа |
|---|---|---|---|
| Система управления манипулятором | 1980 |
|
SU884997A1 |
| Телескопическая стрела манипулятора | 1976 |
|
SU555007A1 |
| Манипулятор лесозаготовительной машины | 1979 |
|
SU791517A1 |
| МАНИПУЛЯТОР ДЛЯ МОНТАЖНЫХ И ПОГРУЗОЧНО-РАЗГРУЗОЧНЫХ РАБОТB^lBJU'^l.-' | 1973 |
|
SU377229A1 |
| Система управления манипулятором | 1981 |
|
SU990503A2 |
| Устройство автоматического управления гидравлическим экскаватором | 1988 |
|
SU1641953A1 |
| Манипулятор | 1975 |
|
SU529072A1 |
| Манипулятор | 1972 |
|
SU446411A2 |
| Транспортное средство для формирования и перевозки пачки длинномерных грузов | 1981 |
|
SU988608A1 |
| Манипулятор | 1975 |
|
SU656826A2 |
Фиг. 5
30
Фиг. 6
