(54) СИСТЕМА .УПРАВЛЕНИЯ МАНИПУЛЯТОРОМ
| название | год | авторы | номер документа |
|---|---|---|---|
| Система управления манипулятором | 1981 |
|
SU990503A2 |
| Манипулятор лесозаготовительной машины | 1979 |
|
SU791517A1 |
| Манипулятор лесозаготовительной машины | 1978 |
|
SU676235A1 |
| Манипулятор | 1980 |
|
SU897495A1 |
| УСТРОЙСТВО УПРАВЛЕНИЯ МАНИПУЛЯТОРОМ | 1994 |
|
RU2113396C1 |
| Устройство управления машиной манипуляторного типа | 1978 |
|
SU701792A1 |
| Система управления гидравлическим манипулятором лесозаготовительной машины | 1979 |
|
SU861063A1 |
| Манипулятор | 1972 |
|
SU446411A2 |
| Гидропривод одноковшового экскаватора | 1981 |
|
SU1004551A1 |
| Манипулятор | 1975 |
|
SU547195A1 |
1
Изобретение относится к системам управления манипуляторами и может быть использовано, например, в лесной промышленности на заготовке леса.
Известны манипуляторы, включающие смонтированную на поворотной колонне стрелу с установленным на оси ее поворота кулачком, связанным со стрелой, рукоять с рабочим органом, шарнирно-рычажный механизм, соединенный с рукоятью и поворотной колонной, и гидропривод с гидроцилиндрами поворота стрелы, шарнирно-рычажного механизма, рабочего органа и плунжерным . регулятором расхода жидкости, плунжер которого контактирует с кулачком 1
Однако такие манипуляторы не обеспечивают заданные законы перемещения по заданным траекториям на всех вылетах, что повышает их нагруженноеть при перемещении грузла.
Известна также система управления манипулятором, включающая кулачок переменного сечения, установленный на оси поворота стрелы и связанный со стрелой с возможностью перемещения вдоль оси- поворота стрелы гидропривод с гидрощ1линдрами поворота поворотной колоний, шарнирно-рычажного
механизма и стрелы и плунжерный регулятор расхода жидкости, плунжер которого контактирует с кулачком 2. Система управления манипулятором
5 такой конструкции не обеспечивает
автоматизированного перемещения груза, например срезанного дерева в пространстве, в котором в действительности это перемещение производится, а также быструю и точную наводку рабочего органа на дерево. Это затрудняет работу оператора и снижает производительность труда. Цель изобретения - повышение производительности.
С этой целью гидропривод снабжен управляющим органом,который выполнен в виде поворотного .в двух взаимно перпендикулярных плоскостях прицела,
20 и двумя дроссельными следящими золотниками,один из которых подключен к гидроцилиндру поворота колонны,а другой - к гидроцилиндру поворота шарнирно-рычажного механизма,причем оба
25 золотника имеют с соответствующими гидроцилиндрами обратные связи и кинематически связаны с прицелом.
Обратные связи дроссельных следящих золотников Q гидроцилиндрами
30 поворота колонны и шарнирно-рычажного механизма выполнены в виде вспомогательных гидроцилиндров, которые подключены параллельно при помощи дросселей к гидроцилиндрам поворота и соединены шарнирно при помощи рычажных систем с дроссельными следящими золотниками.
Кроме того, кинематические связи дроссельных следящих золотников с прицелом выполнены в виде смонтиро ванных на прицеле задающих кулачков, для взаимодействия с золотниками.
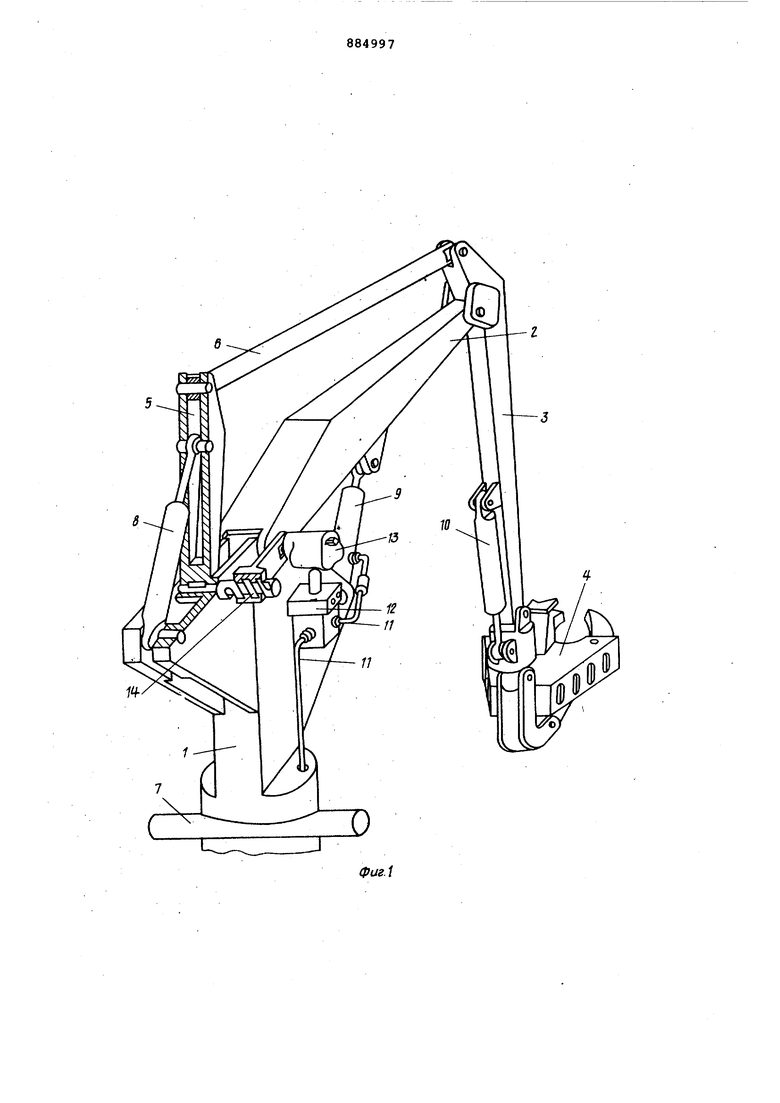
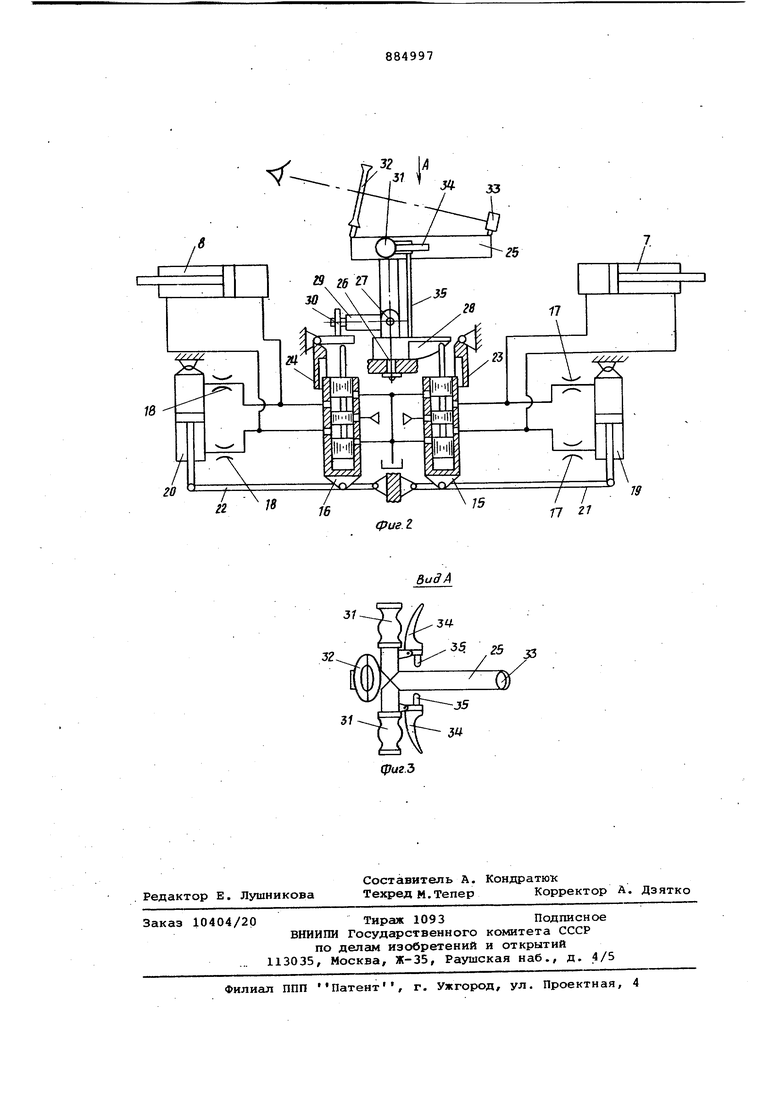
На фиг. 1 схематично изображен манипулятор; на фиг. 2 - система управления манипулятором; на фиг. 3 вид по стрелке А на фиг. 2.
Система управления манипулятором, содержащим смонтированную на поворотной колонне 1 стрелу 2, рукоять 3 с рабочим органом 4, шарнирно-рычажный механизм, состоящий из соединеннрго с поворотной колонной рычага 5 с соединенной с рукоятью тяги б включает гидропривод с гидроцилиндром 7 поворота поворотной колонны, гидроцилиндром 8 поворота шарнирнорычажного механизма, гидроцилиндром
9поворота стрелы и гидроцилиндром
10поворота 1абочего органа. В трубопровод И гидроцилиндра 9 вмонтирован укрепленный на поворотной колонне 1 плунжерный регулятор 12 расхода жидкости,плунжер которого контактирует с установленным подвижно вдоль ос поворота стрелы и связанным с ней кулачком 13 переменного.сечения.В кольцевом пазу кулачка установлена вилка гайки 14, которая повернута на винт, жестко соединенный с осью рычага 5. Гидроцилиндры 7 и 8 пов«рота поворотной колонны и шарнирнорычажного механизма соединены трубопроводами с дроссельными следящими золотниками 15 и 16, сливные полости которых соединены сливной магистралью гидропривода с баком, а нагнетательные - нагнетательной магистралью с насосами, создающими давление нагнетания жидкости Рц. Параллельно гидроцилиндрам 7 и 8 при помощи дросселей 17 и 18 подключены вспомогательные качающиеся гидроцилиндры 19 и 20 небольших размеров. Дроссели 17 и 18 обеспечивают перемещение штоков гидроцилиндров 7 и 19 8 и 20 с пропорциональными скоростями . Штоки вспомогательных качающихдя гидроцилиндров 19 и 20 и дроссельные следящие золотники15 и 16 соединены шарнирно с качающимися рычагами 21 и 22, установленными в кабине оператора машины. Кроме того дроссельные следящие золотники 15
и 16 установлены в качающихся направляющих 23 и 24. В кабине оператора установлен прицел 25, поворотный в двух взаимно перпендикулярных плоскостях относительно осей 26 и 27. На прицеле смонтированы задающие кулачки 28 и 29, один из которых снабжен роликом 30 и контактирует при помощи ролика с золотником 16, а другой выполнен винтообразным и контактирует с золотником 15. Прицел 25 снабжен ручками 31, сеткой 32 и мушкой 33.
Параметры гидропривода рассчитаны так, что визирная линия, проходящая через центр сетки 32 и мушку 33, определяет начальное конечное положение рабочего органа 4 при наведении его на дерево. Для облегчения работы оператора рукоятки управления осталными гидроцилиндрами манипулятора мо гут быть смонтированы также на прицеле, например, в виде поворотных ручных рычагов 34, соединенных гибкими тросами 35 с соответствующими золотниками.
Система управления манипулятором работает следующим образом.
Для захвата и срезания дерева оператор производит навод у рабочего органа 4 на срезаемое дерево. Для этого он поворачивает прицел 25 за ручки 31 вокруг осей 26 и 27 до положения, при котором визирная линия проходящая через центр сетки 32 и мушку 33, проходит через нижнюю част ствола срезаемого дерева, которая должна быть захвачена рабочим органом 4. При повороте прицела 25 поворачиваются задающие кулачки 28 и 29, один из которых воздействует через ролик 30 на дроссельный следящий золотник 16 и переводит его в положение, соответствующее подаче жидкости в одну из полостей гидроцилиндра поворота 8 шарнирно-рычажного механизма и вспомогательного качающегося гидроцилиндра 20 в зависимости от направления поворота прицела 25 в вертикальной плоскости а другой своей винтообразной поверхностью - на дроссельный следящий золотник 15 и переводит его в положение подачи жидкости в одну из полостей гидроцилиндра 7 поворота поворотной колонны 1 и вспомогательного качающегося гидроцилиндра 19 в зависимости от направления поворота прицела 25 в горизонтальной плоскости. гидроцилиндра 7 и 19, 8 и 20 перемещаются с пропорциональными скоростями на величину, пропорциональную перемещению задающих кулачков 28 и 29, до положения, при котором качающиеся рычаги 21 и 22 переводят золотники 15 и 16 в запертые положения. При этом за счет выполнения следящих золотников дроссельными перемещение поворотных гидроцилиндров и рабочего органа 4 в начале происходит ускоренно, а в конце замедленно.Одновременно с поворотом прицела 25 при помощи соответствующего поворотного ручного рычага 34 включается гидроцилиндр поворота 9 стрелы 2, при перемещении штока которого производится перемещение рабочего органа 4 в продольной плоскости манипулятора к срезаемому дереву по заданной траектории При повороте стрелы 2 поворачивается связанный с ней кулачок 13 переменно го сечения, который воздействуя на плунжер плунжерного регулятора 12 расхода жидкости, изменяет расход жидкости в гидроцилиндре поворота 9 стрелы 2 и скорость перемещения его штока. Причем в начале рабочий орган 4 перемещается ускоренно, а в кбнцезамедленно до совмещения с визирной линией, когда производится его остановка. После отделения ствола дерева от пня, обратным поворотом прицела 25 и включением другой полости г.идро цилиндра поворота 9 стрелы производят перемещение комлевой части падающего дерева, например в коник лесозаготовительной машины, до совмещения рабочего органа 4 с визирной линией прицела 25. Эффективность заявленной системы управления манипулятором состоит в облегчении работы оператора машины, а следовательно, и в повышении произ водительности. , Формула изобретения 1. Система управления манипулятором, включающая кулачок переменного сечения, установленный на оси поворота стрелы и связанный с ней с возможностью перемещения вдоль оси ее поворота, плунжерный регулятор pa хода жидкости,, плунжер которого кон тактирует с кулачком, и гидропривод, имеющий гидроцилиндры поворота колонны, манипулятора, шарнирно-рычажного механизма и стрелы, отличающаяся тем, что, с целью повышения производительности, гидропривод снабжен управляющим органом, который выполнен в виде поворотного в двух взаимно перпендикулярных плоскостях прицела, и двумя дроссельными следящими золотниками, один из которых подключен к гидроцилиндру поворота колонны, а другой - к гидроцилиндру поворота шарнирно-рычажного механизма, причем оба золотника имеют с соответствукяцими гидроцилиндрами обратные связи и кинематически связанны с прицелом.. 2.Система по п. 1, отличающаяся тем, что обратные связи дроссельных следящих золотников с гидроцилиндрами поворота колонны и шарнирно-рычажного механизма выполнены в виде вспомогательных гидроцилиндров, которые подключены параллельно при помощи дросселей к гидроцилиндрам поворота и соединены шарнирно при помощи рычажных систем с дроссельными следящими золотниками. 3.Система по п.1, отлича ющ а я с я тем, что кинематические связи дроссельных следящих золотников с прицелом выполнены в виде смон тированных на прицеле задающих кулачков для взаимодействия с золотниками . , Источники информации, принятые во внимание при экспертизе 1.Авторское свидетельство СССР № 676235, кл. А 01 G 23/08, 1978. 2.Авторское свидетельство СССР по заявке 2785232/15, кл. В 25 J 5/00, 1979 (прототип).
