через систему 5 регулирования давления с корректирующей камерой 13, на которой с возможностью поворота установлена цилиндрическая траверса 14. На последней шар- нирно установлена головка 16схвата, поворот которой относительно цилиндрической траверсы 14 осуществляется с помощью силового пневмоцилиндра18. На головке 16 схвата симметрично расположены зажимные элементы 22, выполненные в виде роликовой цепи, соседние звенья которой соединены между собой посредством пневмоцилинд- ров 27. При включении электромагнитного клапана 21 сжатый газ под давлением поступает в пневмоцилиндры 27, в результате этого зажимные элементы 22 захватывают объект 29, для открепления которого необходимо сбросить давление в пневмоцилин- драх 27. Потери сжатого газа восполняются за счет размещенных в камере 4 высокого давления ячеек 6 с недетонирующим газообразующим веществом 7, которое превращается в газ при подведении высокого напряжения к электроискровой свече 12. Сигнал на подвод высокого напряжения поступает от датчика 9 давления газов, который также установлен в камере 4 высокого давления. 1 з.п. ф-лы, 2 ил,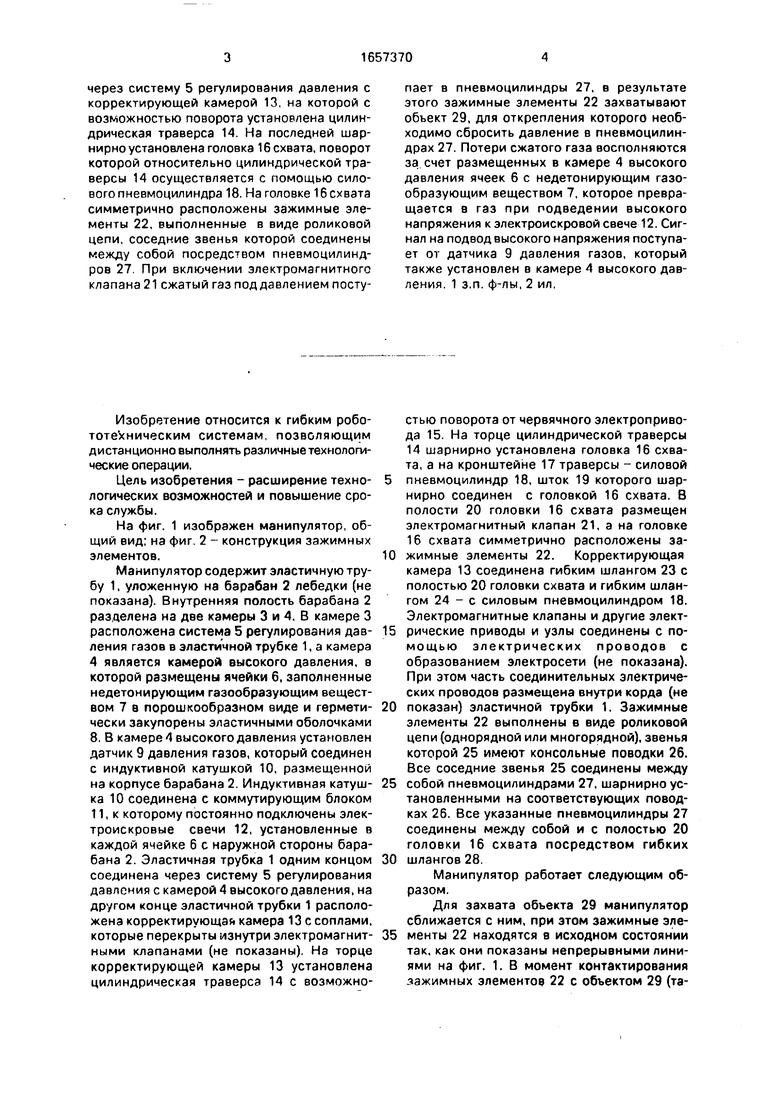
| название | год | авторы | номер документа |
|---|---|---|---|
| Схват | 1990 |
|
SU1811477A3 |
| Захватное устройство | 1984 |
|
SU1197835A1 |
| Губка схвата | 1990 |
|
SU1815212A1 |
| ФОРКАМЕРА ДВИГАТЕЛЯ ВНУТРЕННЕГО СГОРАНИЯ | 2007 |
|
RU2327882C1 |
| ВЫСОКОЧАСТОТНАЯ ЭЛЕКТРОРАЗРЯДНАЯ СИСТЕМА ВОСПЛАМЕНЕНИЯ | 1994 |
|
RU2094646C1 |
| Устройство для отделения верхнего листа от стопы и подачи его к обрабатывающей машине | 1989 |
|
SU1703228A1 |
| АДАПТИВНЫЙ СХВАТ МАНИПУЛЯТОРА | 1991 |
|
RU2021099C1 |
| СХВАТ МАНИПУЛЯТОРА | 1999 |
|
RU2147277C1 |
| Схват манипулятора | 1984 |
|
SU1242348A1 |
| ЭНЕРГЕТИЧЕСКАЯ УСТАНОВКА С ПОМЕХОПОДАВЛЯЮЩИМ УСТРОЙСТВОМ, ИМЕЮЩИМ ПОНИЖЕННУЮ ВНОСИМУЮ ЭЛЕКТРИЧЕСКУЮ ЕМКОСТЬ | 2005 |
|
RU2293390C1 |
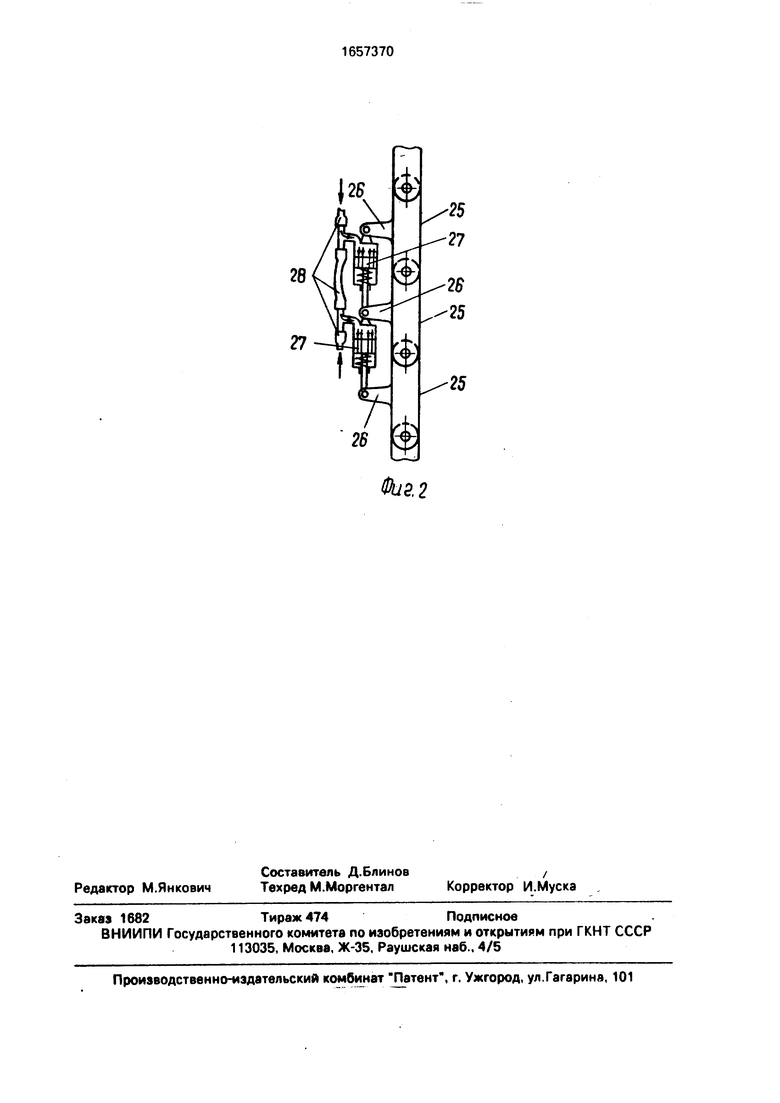
Изобретение относится к гибким робо- тотехническим системам и может быть использовано в качестве манипулятора для работы в безвоздушном пространстве или в водной среде. Цель - расширение технологических возможности за счет поворота го- лоэки охвата в двух плоскостях и повышение срока службы. Манипулятор состоит из эластичной трубки 1, связывающей камеру 4 высокого давления в барабане 2 и |#- Фиг.1
Изобретение относится к гибким робо- тоте хническим системам, позволяющим дистанционно выполнять различные технологические операции.
Цель изобретения - расширение технологических возможностей и повышение срока службы.
На фиг. 1 изображен манипулятор, общий вид; на фиг. 2 - конструкция зажимных элементов.
Манипулятор содержит эластичную трубу 1, уложенную на барабан 2 лебедки (не показана). Внутренняя полость барабана 2 разделена на две камеры 3 и 4. В камере 3 расположена система 5 регулирования давления газов в эластичной трубке 1, а камера 4 является камерой высокого давления, в которой размещены ячейки 6, заполненные недетонирующим газообразующим веществом 7 в порошкообразном виде и герметически закупорены эластичными оболочками 8. В камере 4 высокого давления установлен датчик 9 давления газов, который соединен с индуктивной катушкой 10, размещенной на корпусе барабана 2. Индуктивная катушка 10 соединена с коммутирующим блоком 11, к которому постоянно подключены электроискровые свечи 12, установленные в каждой ячейке 6 с наружной стороны барабана 2. Эластичная трубка 1 одним концом соединена через систему 5 регулирования давления с камерой 4 высокого давления, на другом конце эластичной трубки 1 расположена корректирующая камера 13с соплами, которые перекрыты изнутри электромагнитными клапанами (не показаны). На торце корректирующей камеры 13 установлена цилиндрическая траверса 14 с возможностью поворота от червячного электропривода 15. На торце цилиндрической траверсы 14 шарнирно установлена головка 16 схвата, а на кронштейне 17 траверсы - силовой
пневмоцилиндр 18, шток 19 которого шарнирно соединен с головкой 16 схвата. В полости 20 головки 16 схвата размещен электромагнитный клапан 21, а на головке 16 схвата симметрично расположены зажимные элементы 22. Корректирующая камера 13 соединена гибким шлангом 23 с полостью 20 головки схвата и гибким шлангом 24 - с силовым пневмоцилиндром 18. Электромагнитные клапаны и другие электрические приводы и узлы соединены с помощью электрических проводов с образованием электросети (не показана). При этом часть соединительных электрических проводов размещена внутри корда (не
показан) эластичной трубки 1. Зажимные элементы 22 выполнены в виде роликовой цепи (однорядной или многорядной), звенья которой 25 имеют консольные поводки 26. Все соседние звенья 25 соединены между
собой пневмоцилиндрами 27, шарнирно установленными на соответствующих поводках 26. Все указанные пневмоцилиндры 27 соединены между собой и с полостью 20 головки 16 схвата посредством гибких
шлангов 28.
Манипулятор работает следующим образом.
Для захвата объекта 29 манипулятор сближается с ним, при этом зажимные элементы 22 находятся в исходном состоянии так, как они показаны непрерывными линиями на фиг. 1. В момент контактирования зажимных элементов 22 с объектом 29 (такой момент устанавливается или визуально, или с помощью специального датчика) включается электромагнитный клапан 21 и обеспечивается подача сжатого газа из нижней полости 20 головки 16 схвата к пнев- моцилиндрам 27 через гибкие шланги 28. Под действием давления газов срабатывают пневмоцилиндры 27 и зажимные элементы 22 принимают положение, обеспечивающее захват объекта 29. На фиг. 1 момент захвата обьекта показан пунктирными линиями Для расстыковки объекта необходимо отключить катушку клапана 21. С этого момента полости пневмоцилиндров 27 сообщаются с окружающей средой и за счет пружин, уста- новленных в каждом пневмоцилиндре 27, зажимные элементы 22 переходят в исходное свернутое состояние.
Если по технологическим условия/л потребуется развернуть объект под некото- рым углом относительно вертикальной оси, необходимо подключить силовой пнеемо- цилиндр 18. Разворот объекта в горизонтальной плоскости осуществляется путем включения червячного электропривода 15.
В процессе корректировки положения манипулятора неизбежен расход сжатого воздуха. Для его пополнения в конструкции манипулятора предусматриваются ячейки 6 заполненные газообразующим веществом в порошкообразном виде. В частности, если давление газов снижается до некоторой минимальной величины, то сработает дачик 9 давления.
За счет этого от индуктивной катушчи 10 через коммутирующий блок 11 подводится высокое напряжение к одной из электроискровых свечей 12. Таким образом, за счет образования искры газообразующее вещество, например порох , возгорается, зла- стичная оболочка 8 отстреливается и камера 4 высокого давления заполняется газом до некоторого максимально допустимого давления.
Такие операции по мере расхода газа выполняются автоматически, при этом количество циклов зависит от числа заряженных ячеек газообразующим веществом.
Предлагаемый манипулятор может быть использован в космическом простран- стве при выполнении операций, связанных с кантовкой объектов, буксировкой, стыковкой, сборкой, выполнение аварийно-спасательных работ и т.д.
Из-за отсутствия в манипуляторе ком- мутирующих контактов и скользящих соединительных узлов пневмосистемы обеспечивается его надежное и безотказное функционирование.
Предлагаемый манипулятор без особых конструктивных изменений можно использовать в подводных условиях на относительно больших глубинах
Формула изобретения
28
Фиг. 2
| Авторское свидетельство СССР № 1552510, кл | |||
| Видоизменение пишущей машины для тюркско-арабского шрифта | 1923 |
|
SU25A1 |
