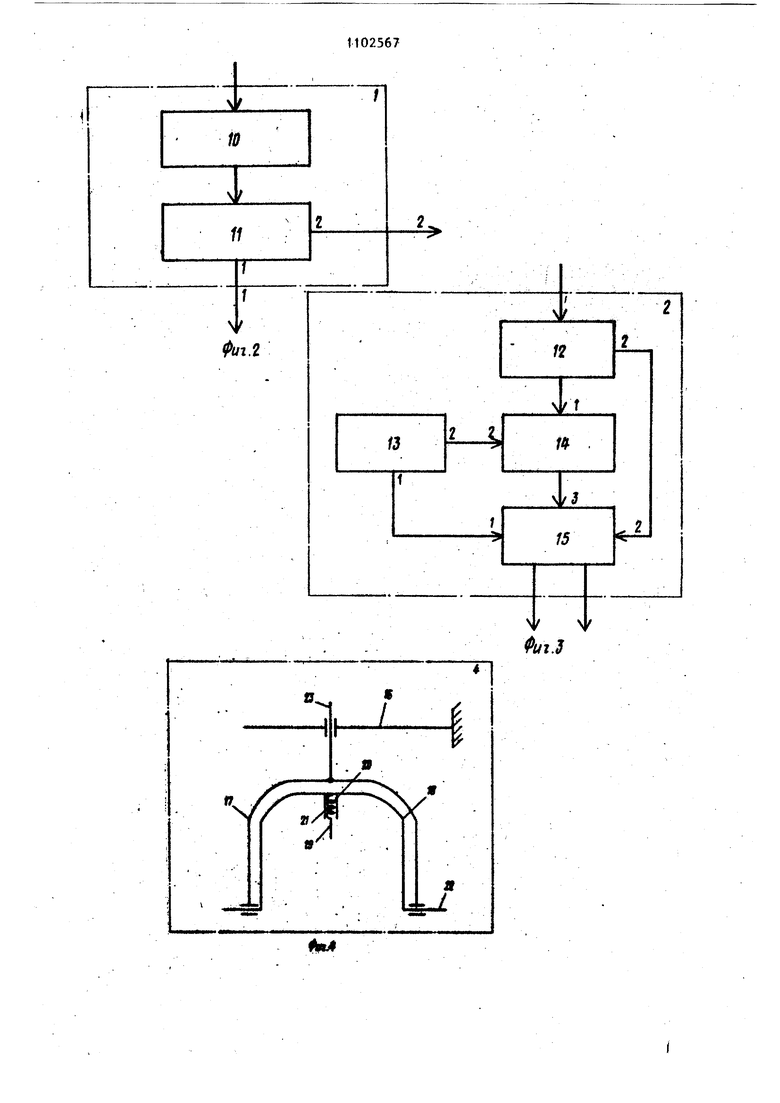
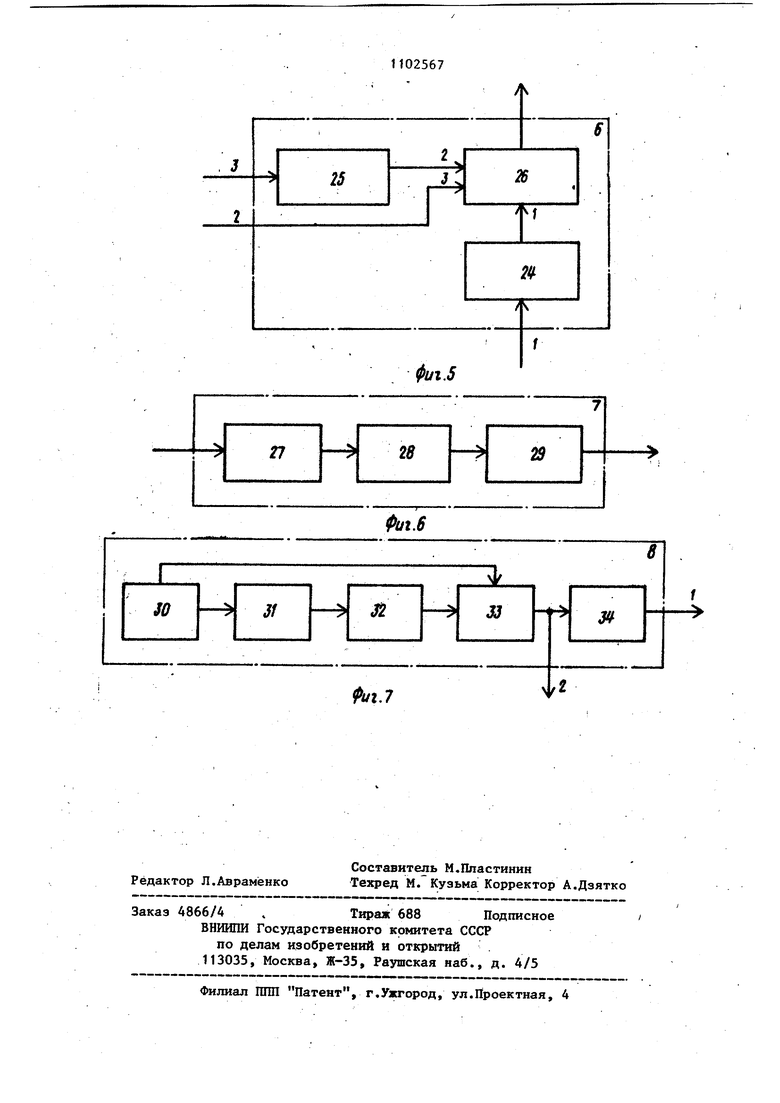
11 Изобретение относится к медицинской технике, в частности к устройствам исследования слуха с диагностическими целями методами преобразования реакций испытуемого в электрические сигналы с их последзтощей обработкий, и может быть использовано для диагностики поражений головного мозга. Известно устройство-манипулятор, предназначенное для механического перемещения рабочего органа в пространстве с преобразованием обобщенных координат в электрические сигналы, содержащее шарнирно соединенные друг с другом на концах звенья с воз можнрстью взаимного поворота, которые могут быть использованы для конт роля реакций испытуемого С 13Однако из принципа работы этого устройства видно, что для фиксации траектории движения звукового образа, возникающего у испытуемого при исследовании (траектория располагается на поверхности головы) необхо-димо не менее пяти степеней свободы (обобщенных координат), что усложняет конструкцию устройства. Наиболее близким к предлагаемому по технической сущности является устройство для исследования восприятия движущегося звукового образа, содержащее последовательно соединен ные блок управления и генератор импульсов, каждый из двух выходов которого подключен к соответствугадему головному телефону, выход каждого из которьпс является выходом устройства. В этом устройстве блок управления управляет параметрами выходных сигналов генератора импульсов, с двух независимых выходов которого на головные телефоны поступают серии импульсов с изменяющейся во времени задержкой, что вызывает у испытуемого ощущение движения субъективного звуково го образа. После окончания прослушивания сиг нала испытуемый указьгоает на поверхности головы траекторию движения субъективного звукового образа, кото рая измеряется сантиметровой лентой и пересчитьюается в угловые единицы (градусы). При этом предполагается, что траектория имеет вид дуги окружности определенного радиуса, что и позволяет сделать такой пересчет. У здоровых испытуемых траектория занимает угол 90. 7 У больных с поражением правой височной области траектория движения субъективного звукового.образа укорачивается (от 70° до О), что и позволяет диагностировать поражение Г23. Недостатком этого .устройства является относительно низкая точность диагностирования, обусловленная следующими причинами. Измерение длины траектории проводится по указанию испытуемого после предъявления звуковых сигналов, т.е. когда у испытуемого уже отсутствует ощущение звукового образа. Устройство-прототип не позволяет проводить измерение траект ории в процессе исследования. Траектория движения имеет более сложную форму, чем дуга окружности, и представляет собой кривую,характеризуемую изменением во времени двух координат (например, углов в сферической системе координат). Устройство-прототип не позволяет исследовать форму траектории и регистрировать автоматически результат исследования. Кроме того, устройство-прототип не позволяет соотносить координаты звукового образа в процессе движения с текущими значениями параметров сигналов (например, величиной задержки), а также сравнивать результат исследования с нормой в ходе исследования и задавать траектории сложной формы. Целью изобретения является пдвышение точности диагностики поражения правой височной доли головного мозга пациента. Поставленная цель достигается тем, что устройство для исследования восприятия движущегося звукового образа, содержащее последовательно соединенные блок управления и генератор , каждый из двух выходов котоРого подключен к соответствующему головному телефону, выход каждого из которых является выходом устройства, содер кит задатчик исходной траектории. Формирователь меток и последовательно соединенные да,тчик-манипулятор траектории движения звукового образа, датчики углов места и азимута, блок обработки информации и регистратор, причем второй выход блока управления соединен через формирователь меток с вторым входом блока обработки информации, третий вход которого подключен к первому выходу задатчика исходной траектории, второй выход которого соединен с входом блока управления. На фиг. 1 изображена структурная схема устройства для исследования восприятия движущегося звукового образа; на фиг. 2 - пример реализации блока управления на фиг. 3 - пр мер реализации генератора импульсов на фиг. 4 - схема конструкции датчика-манипуляторатраектории движения звукового образаJ на фиг, 5 - пример реализации устройства обработки информации на фиг. 6 - пример реализа ции формирователя меток на фиг. 7пример реализации задатчика исходной траектории. Устройство для исследования восприятия движущегося звукового образа содерлйст блок 1 управления, генератор 2 импульсов, головные телефоны 3, .датчик-манипзотятор 4 траектории движения звукового образа, датчики 5 углов места и азимута, блок обработки информации 6, формирователь 7 меток, задатчик 8 исходной траектории и регистратор 9. Блок управления (фиг. 2) содержит приемный регистр 10 и постоянное запоминающее устройство 11. Генератор импульсов (фиг. 3) В1 лючает в себя приемный регистр 12, заданяций генератор 13 импульсов, управляемый элемент 14 задержки и управляемый аттенюатор 15. Датчик-манипулятор траектории движения звукового образа (фиг. 4) состоит из неподвижного штатива 16, |наружной 17 и внутренней 18 дужек,контактирующего элемента 19 (щтыря или щу па), цилиндрической пружины 20, втул ,ки 21 ,оси 22 угла местаQ (t) и оси 23 , азимутд tf (t) . Устройство обработки информации (фиг. 5) содержит блоки преобразования координат 24 и 25, сумматор 26 Формирователь йеток (фиг. 6) вклю чает в себя дешифратор 27, формирователь 28 импульса, ждущий мультивиб ратор 29. Задатчик исходной траектории (фиг. 7) состоит из генератора 30 тактовых импульсов, счет ика 31 ядре са, запоминающего устройства 32, буферного регистра 33 и- цифро-аналогового преобразователя 34. Входом блока 1 управления (фиг.2) является вход премного регистра 10, последовательно соединенного е поСтоянным запоминающим устройством 11, первый и второй выходы кЬторого соединены с первым и вторым выходами блока 1. Управляемый аттенюатор 15 (фиг. 3) выходы которого являются, выходами генератора 2 импульсов, связан через последовательно соединенные приемный регистр 12 и управляемый элемент 14 задержки с входом генератора 2 импуль сов, при этом второй выход приемного регистра 12 соединен с вторым входом управляемого аттенюатора 15, первый вход которого соединен с первым выходом заданицего генератора 13 импульсов, подключенного вторым выходом к второму входу элемента 14 задержки, Неподвижный штатив 16 (фиг. 4) служит опорным основанием конструкции датчика-манипулятора 4 траектории движения звукового образа. Голова испытуемого с телефонами располагается, внутри помещенных одна в другую и шарнирно соединенных друг с другом на концах с возможностью взаимного поворота наружной и внутренней дужек-17 и 18. Ось 23 жестко прикреплена одним концом к середине нарзтной дужки 17, а другим - шарнирно. соединена с неподвижным штативом 16. К середине внутренней стороны дужки 18 жестко прикреплена втулка 21 в плоскости последней. Контактируквций элемент 19 выполнен в виде цилиндрической пружины 20, размещенной fk втулке 21, при этом один конец пружины жестко прикреплен к внутренней дужке 18, а другой - выполнен в форме щупа (или штыря) длиной 50- 70 мм. Пространственные координаты положения контактирунядего Элемента 19 являются входным сигналом датчикаманипулятора 4, а его выходным сигналом - углы поворота б(t) иY(t) осей 22 и 23. Выход сумматора 26 (фиг. 5) является выходом блока 6 обработки информации, первый и третий входы которого через блоки 24 и 25 преобразования координат соединены с первым ji вторым входами сумматора 26, третий вход которого является вторым входом устройства 6. Вход дешифратора 27 (фиг. 6) является входом формирователя 7 меток. S11 Дешифратор 27,- формирователь 28 импульса и.ждущий мультивибратор 29 соединены последовательно, причем выхбд ждущего мультивибратора 29 явля ется выходом формирователя 7. Генератор 30 тактовых импульсов, счетчик 31 адреса, запоминающее устройство 32, буферньй регистр 33, вторрй вход которого соединен с выхо дом генератора 30, и цифро-аналоговы преобразователь 34 соединены последовательно (фиг. 7), причем выход преобразователя 34 является первым выходом задатчика 8 исходной траек - , Второй выход задатчика 8 сое тории, динен с выходом буферного регистра 33 Устройство для исследования,восприятия движущегося звукового образа работает следующим образом. Коды, соответетвзпощие координатам двумерной траектории движения звукового образа, записанные в запоминающем устройстве 32 задатчика 8 исходной траектории, поступают на вход блока 1 управления и через регистр 10 в запоминающее устройство 11. В запоминающем устройстве 11 записана функциональная зависимость необходимых значений параметров выходных сигналов генератора 2 импульсов (вре менной задержки между каналами и затухания в каждом канале) от текущих значений координат траектории. Коды, соответствукнцие величине временной задержки, со второго выхода блока 1 управления поступают на вход формирователя 7 меток. Коды параметров сигналов генератора,2 импульсов с первого выхода блока 1 управления поступают через приемный регистр 12 на управляющие входы элемента 14 задержки (величина временной задерЖ1си) и аттенюатора 15 (величина затухания). Задающий генератор 13 вырабатывает импульсы, поступанщие через аттенюатор 15 на выход правого и левого каналов генератора 2 импульсов (один канал непосредственно, а другой через элемент 14 задержки). Выходные сигналь правого и левого каналов генератора 2 импульсов через головные телефоны 3 прослушиваются, соответственно правым и левым ухом испытуемого. Голова испытуемого помещена внут|ри подвижных дужек 17 и 18 датчикаманипулятора 4 траектории движения 7 звукового образа. Перемещая контактирующий элемент 19 по поверхности головы, испытуемый непосредственно во время прослушивания сигнала указывает траекторию движения субъективного звукового образа. Перемещение элемента 19 преобразуется датчикомманипулятором 4 в углы поворота осей 22 и 23, соответствующие углу места и азимуту сферической системы координат. На этих осях установлены датчики углов 5 места и азимута, на выходах которых таким образом вырабатываются сигналы текущих сферических координат траектории движения субъективного звуковЬго образа, возникающего у испытуемого во время прослушивания. Сигналы с датчиков углов 5 места и азимута поступают на первый вход блока 6 обработки информации.. На второй вход блока 6 обработки информации с выхода формирователя 7 меток поступают импульсы, соответствующие моментам прохождения величины задержки через значения, определяемые с шагом, задаваемым дешифратором 27 формирователя 7 меток. На третий вход блока 6 обработки инфо рмации поступают; в виде аналоговых сигналов координаты исходной траектории с первого выхода задатчика 8 исходной траектории. Блоки преобразования координат 24 и 25 преобраззтот значения поступающих на их входы координат к одному виду, удобному для регистрации (например, в декартову систему координат) в регистраторе 9. Таким образом, на выходе блока 6 обработки информации сумматором 26 вырабатывается сигнал отклонения траектории движения звукового образа, наблюдаемый у испытуемого от исходной, задаваемой задатчиком 8 исходной траектории с метками, соответств5тощими текущим значениям интерауральной задержки. Этот сигнал поступает на регистратор 9 (например, |цвухкоординатный самописец). Решение о поражении правой височной доли головного мозга принимается врачом на основе анализа прописей регистратора 9, которые фиксируют отклонения от нормы в динамике при обследовании. Устройство для исследования восприятия движущегося звукового образа обеспечивает более высокую точность и автоматизацию диагностики поражения правой височной доли гоповного мозга.
. Повышение точности гостигается за счет автоматизированного анализа динамических отклонений от нормы при фиксации величин параметров ввуховых сигналов, предъявляемых обследуемому непосредственно в процессе исследования, и автоматической регистрации полученных данных. Автоматизация процесса позволяет сократить время обследования одного пациента « т.е. увеличить пропускную способность при массовых обследованиях и снизить вероятность ошибок за счет
уменьшения утомляемости оператора, обслуживающего устройство.
Применение датчика-манипулятора обеспечивает упрощение конструкции механизма фиксации траектории движения за счет сокращения числа степеней свободы и количества пбдвижных звеньев до двух, с движением их в сферической системе координат, необходимой для последунщей обработки.
Предлагаемое устройство может быть использовано для диагностики более широкого класса заболеваний, связанных с нарушением восприятия движущегося звукового образа, и для профессиональных обследований (например летчиков, космонавтов и т.п.).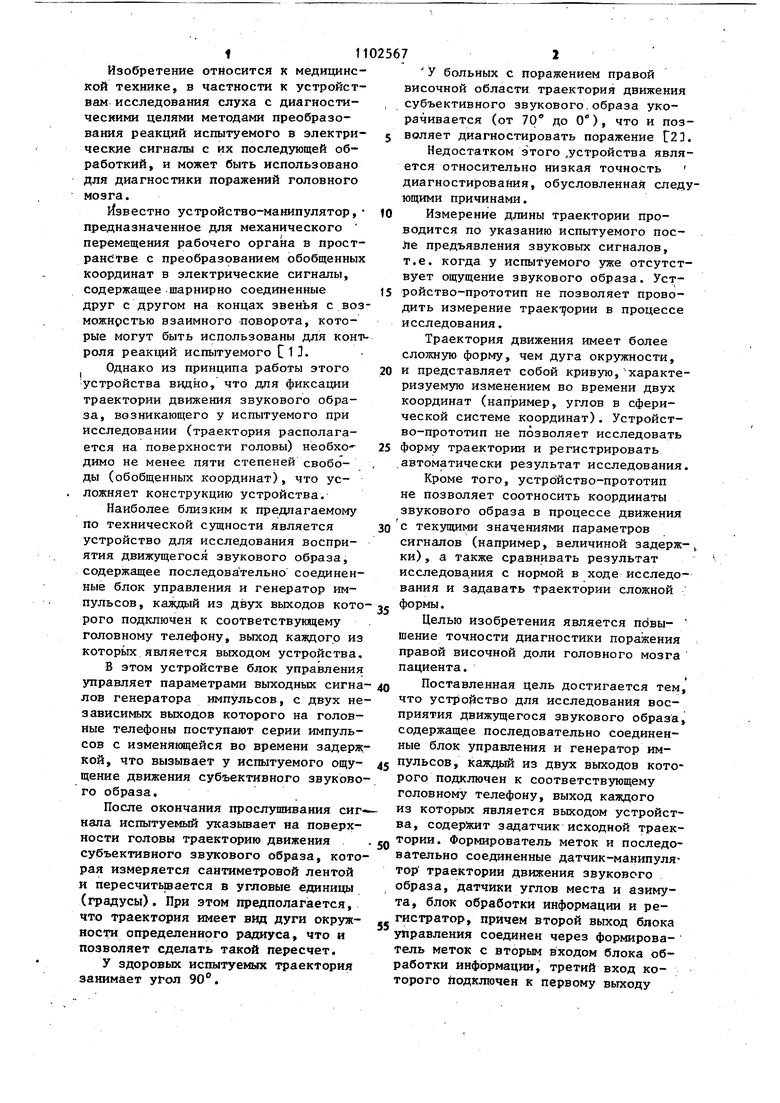
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для исследования восприятия движущегося звукового образа | 1990 |
|
SU1727788A1 |
| СПОСОБ ИССЛЕДОВАНИЯ ПРОСТРАНСТВЕННОГО СЛУХА | 1993 |
|
RU2090139C1 |
| Способ исследования восприятия движущегося звукового образа | 1977 |
|
SU679204A1 |
| Устройство для контроля работы оператора | 1989 |
|
SU1709370A1 |
| УСТРОЙСТВО ДЛЯ ИМИТАЦИИ РАДИОЛОКАЦИОННОГО ИЗОБРАЖЕНИЯ МЕСТНОСТИ | 1988 |
|
SU1841035A1 |
| Устройство для исследования функций внимания | 1990 |
|
SU1710002A1 |
| Устройство для оценки работы оператора | 1990 |
|
SU1735885A1 |
| Устройство для психологических исследований | 1990 |
|
SU1711825A1 |
| Тренажер сварщика | 1988 |
|
SU1550571A1 |
| Устройство для исседования зрительной системы | 1984 |
|
SU1209149A1 |
УСТРОЙСТВО ДЛЯ ИССЛЕДОВАНИЯ ВОСПРИЯТИЯ ДВИЖУЩЕГОСЯ ЗВУКОВОГО ОБРАЗА, содержащее последовательйо соединённые блок управления и генератор импульсов, каждый из двух выходов которого подключен к соответствую ющему головному телефону, выход каждого из которых является выходом устройства, отличающеес я тем, что, с целью повышения точности диагностики поражения правой височной доли головного мозга пациента, оно содержит, задатчик исходной траектории, формирователь меток и последовательно соединенные датчик-манипулятор траектории движения звукового . образа, датчики углов места и азимута, блок обработки информатщи и регистратор, причем второй выход блока управления соединен через формирователь меток с вторым входом блока обработки информации, третий вход ( которого подключен к первому выходу задатчика исходной траектории, вто- рой выход которого соединен с входом блока управления.
Л
±
NK
фиг.2
,
1102567
SL
12
111115
Ny k
Фиг.З
-2
фиг.7
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Привод манипулятора | 1973 |
|
SU471189A1 |
| Видоизменение пишущей машины для тюркско-арабского шрифта | 1923 |
|
SU25A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Альтмай Я.А | |||
| и др, Восприятие движущегося субъективного звукового образа больными с поражениями ных областей мозга | |||
| Физиологии человека | |||
| Т | |||
| Кипятильник для воды | 1921 |
|
SU5A1 |
| Приспособление для разматывания лент с семенами при укладке их в почву | 1922 |
|
SU56A1 |
