Фиг.1
vi ю х| Ч
00 00
Изобретение относится к медицинской технике, в частности к устройствам исследования и проверки пространственного слуха, и может использоваться для изучения влияния интерауральных параметров стимулирующего звукового сигнала на восприятие звукового образа, а также для диагностики поражений головного мозга.
Исследования пространственного слуха имеют более, чем 100-летнюю историю, однако изучение восприятия движущихся источников звука начались сравнительно недавно. Дихотйческая (через головные телефоны) стимуляция слуховой системы обладает очевидным преимуществом перед диетической (в свободном звуковом поле) стимуляцией при исследованиях пространственного слуха за счет возможности изучения роли каждого интераурального параметра в локализации источника звука и в закономерностях его восприятия. Известно, что восприятие движения источника звука в горизонтальной плоскости определяется двумя интерауральнымм параметрами.- межушными различиями стимуляции по времени (А Т) и межушными различиями стимуляции по интенсивности ( Л I), где Д I Iny - лу, причем лу и Iny - величины интенсивности звукового сигнала на левое и правое уши соответственно. Поэтому мы вместо термина межушные различия стимуляции по интенсивности будем использовать термин разность по интенсивности, так как именно этот параметр фактически является управляющим для задания траектории движения звукового образа (30).
Известны устройства, позволяющие при дихотической стимуляции исследовать влияние только одного из интерауральных параметров на восприятие движущегося 30. В этих устройствах обычно использована линейная зависимость между величиной соответствующего интераурального параметра и координатами точки звукового про- $транства.
Трудность решения задачи исследования влияния обоих интерауральных параметров на восприятие движущегося 30 обусловлена, во-первых, различным влиянием на восприятие траектории динамических характеристик (диапазон, скорость) каждого интераурального параметра и нелинейностью восприятия даже при неизменных их значениях, т.е. в статике. И как следствие - неоднозначность решения задачи оценки вклада каждого интераурального параметра в траекторию движения 30, воспринимаемую испытуемым. Во-вторых,
невозможность оценки взаимовлияния интерауральных параметров на восприятие движущегося 30, т.е. в динамике.
Пример. Очевидно, что неподвижный
30 в определенной точке пространства может быть задан как с помощью одного неизменного интераурального параметра, например ДТ, так и при наличии одновременно обоих неизменных интерауральных
параметров ( ДТ и Д I) при использовании метода полной или частичной компенсации. В этом случае задача решается однозначно. Однако неподвижный 30 в той же точке пространства может быть задан при изменяющихся во времени интерауральных параметрах, обеспечивающих взаимную компенсацию движения 30. Но в этом случае из-за наличия динамических характеристик интерауральных параметров имеет
место бесчисленное множество решений. И даже при обеспечении однозначности решения задачи необходим объективный критерий оценки динамики взаимовлияния интерауральных параметров на восприятие
30.
Наиболее близким к предлагаемому является устройство для исследования восприятия движущегося 30. содержащее последовательно соединенные головные телефоны, двухканальный генератор импульсов, блок управления, задатчик траектории, блок обработки информации, датчики углов места и азимута, датчик-манипулятор траектории движения 30. Причем второй вход
блока обработки информации через формирователь меток соединен с блоком управления, а выход блока обработки подключен к регистратору.
Задатчик траектории формирует траекторию движения 30, определяемую одним интерауральным параметром Д Т за счет временной задержки импульсов, поступающих через головные телефоны на одно ухо испытуемого относительно импульсов, поступающих на другое его ухо. Коды, соответ- ствующие координатам траектории движения 30, в блоке управления преобразуются с помощью постоянного запоминающего устройства (ПЗУ) в коды временной
задержки в соответствии с заданной функциональной зависимостью, позволяющей . учесть нелинейность восприятия траектории движения 30 от величины интераураль- ной задержки по времени ДТ. В генераторе
импульсов эти коды определяют при заданной амплитуде импульсов в каждом канале величину временной задержки импульсов на одном канале относительно импульсов тактового генератора, поступающих на другой канал. Блок обработки информации, включающий сумматор и блоки преобразования координат траектории движения 30, обеспечивает отображение на регистраторе отклонения траектории, отслеживаемой испытуемым с помощью датчика-манипулятора и расположенных на его осях датчиков углов места и азимута, от исходной траектории, задаваемой задатчиком траектории. Сигнал отклонения маркирован метками, соответствующими текущим значением ин- терауральной задержки на время AT (дискретно с заданным шагом).
Это устройство не позволяет проводить исследования восприятия движущегося 30 при задании траектории его движения за счет одновременного изменения двух инте- рауральных параметров - межушных различий по времени ДТ и межушных различий по интенсивности ДI. Тем самым отсутствует возможность исследования в динамике как взаимовлияния интерауральных параметров на траекторию движения 30, так и на восприятие этой траектории испытуе- мым. И как следствие - отсутствие объектив- ного критерия оценки такого взаимовлияния. Наличие объективного критерия необходимо, поскольку и статические, и динамические характеристики восприя- тия даже при раздельном использовании интерауральных параметров для задания траектории движения 30 нелинейны.
Целью изобретения является обеспечение возможности исследования в динамике интерауральных параметров на восприятие движущегося (и в частном случае, нелод- вижного) 30.
Указанная цель достигается благодаря тому, что в устройство, содержащее после- довательно соединенные манипулятор, датчики, укрепляемые на осях манипулятора и измеряющие координаты воспринимаемого испытуемым положения 30, например угол места и азимут, блок первого ПЗУ, в котором записана функциональная зависимость величины временной задержки AT от координат задаваемой траектории 30, генератор импульсов и головные телефоны, причем блок обработки информации подключен к первому регистратору, дополнительно включены блок разделения траекторий, блок второго ПЗУ, в котором записана функциональная зависимость величины разности интенсивностей А I, блок цифрбаналогового преобразования, модулятор и второй регистратор. При этом блок разделения траекторий включен в связь между задатчиком исходной траектории и блоком первого ПЗУ, его управляющий вход
также связан с задатчиком исходной траектории, а его второй выход через блок второго ПЗУ, блок цифроаналогового преобразования и модулятор связан с вторым регистратором. Кроме того, второй выход блока первого ПЗУ соединен с вторым входом блока цифроаналогового преобразования, первый выход блока второго ПЗУ соединен с вторым входом генератора имг пульсов и второй вход модулятора связан с выходом блока обработки информации и первым регистратором.
Генератор импульсов содержит первый и второй регистры, предназначенные для обеспечения структурной и временной независимости работы генератора импульсов от поступающей информации соответственно о временной задержке Д Т и разности интенсивностей А I, сумматор, задающий генератор, управляемый элемент задержки и блоки управляемых аттенюаторов первого и второго каналов. Выход первого регистра соединен с первым входом управляемого элемента задержки, второй вход которого связан с выходом задающего генератора и первым входом блока управляемого аттенюатора первого канала. Второй вход блока управляемого аттенюатора первого канала соединен с первым выходом второго регистра и первым входом сумматора, второй вход которого связан с вторым выходом второго регистра, а входы блока управляемого аттенюатора второго канала соединены с выходом управляемого элемента задержки и выходом сумматора.
Блок задатчика исходной траектории содержит генератор, счетчик адреса, запоминающее устройство, первый и второй регистры, цифрозналоговый преобразователь. Отличие блока задатчика исходной траектории от описанного в известном состоит в увеличении разрядности запоминающего устройства и наличии второго регистра, предназначенного для хранения значения весовой функции при считывании информации из запоминающего устройства.
Блок разделения траекторий содержит первый регистр для хранения текущего значения координат точки исходной траектории и второй регистр для хранения значения весовой функции. Выходы первого и второго регистров связаны с адресными входами ПЗУ, имеющего два выхода. Регистры предназначены для обеспечения структурной и , временной независимости работы блока разделения траекторий относительно типа используемого ПЗУ (линейный или матричный).
Блок цифроаналогового преобразования обеспечивает преобразование интерау- ральных параметров AT и АI из цифровой в аналоговую форму и может быть реализован на цифроаналоговых преобразователях.
Блок модулятора содержит генератор модулирующей частоты, амплитудный модулятор, компаратор, ключ и сумматор. Выход генератора модулирующей частоты соединен с первым входом амплитудного модулятора, управляющий вход которого соединен с вторым входом блока модулятора, а выход -с первым входом ключа, на управляющий вход которого через компаратор поступает также сигнал с второго входа блока модулятора. Выход ключа связан с вторым входом сумматора, на первый вход которого поступает сигнал с первого входа блока модулятора.
Блок обработки информации аналогичен используемому в известном и содержит блоки преобразования координат и сумматор.
Второй регистратор является двухкоор- динатным и предназначен для документирования взаимовлияния интерауральных параметров АТи А I путем предоставления исследователю объективной оценки текущих значений каждого интераурального параметра с отметками моментов времени, когда наблюдается отклонение воспринимаемой испытуемым траектории движения 30. от заданной исходной траектории. При этом величина этого отклонения одновременно документируется в заданной системе координат (как и в известном) на первом регистраторе.
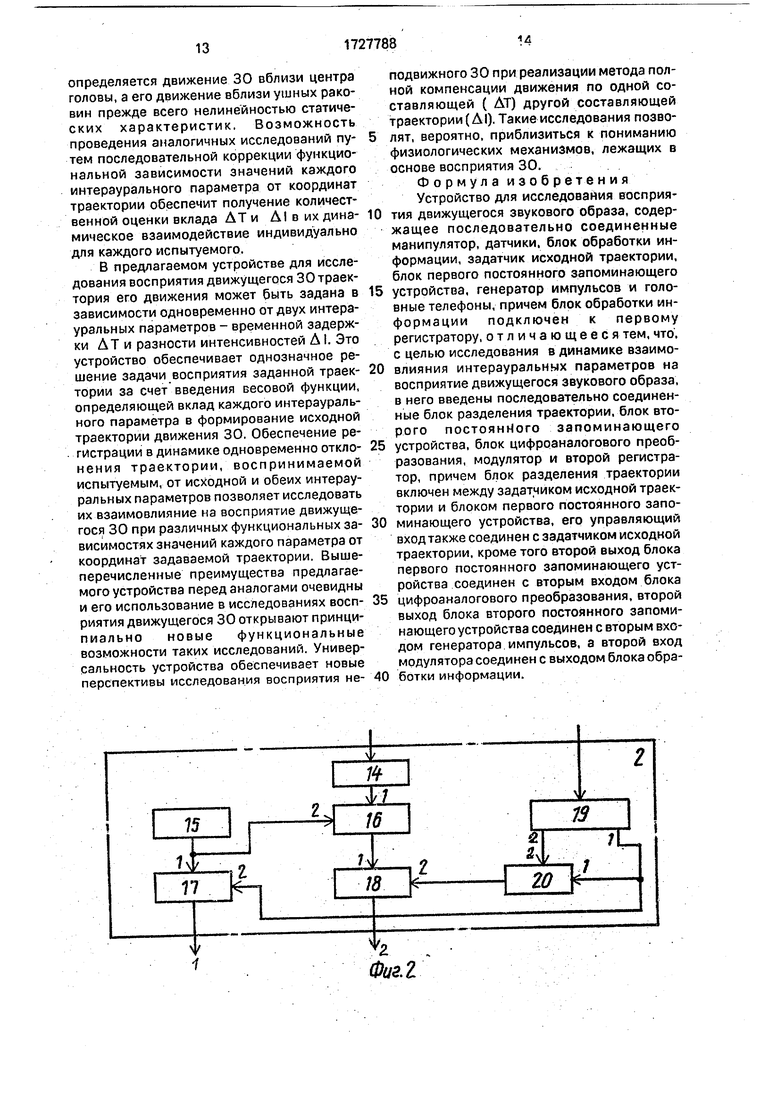
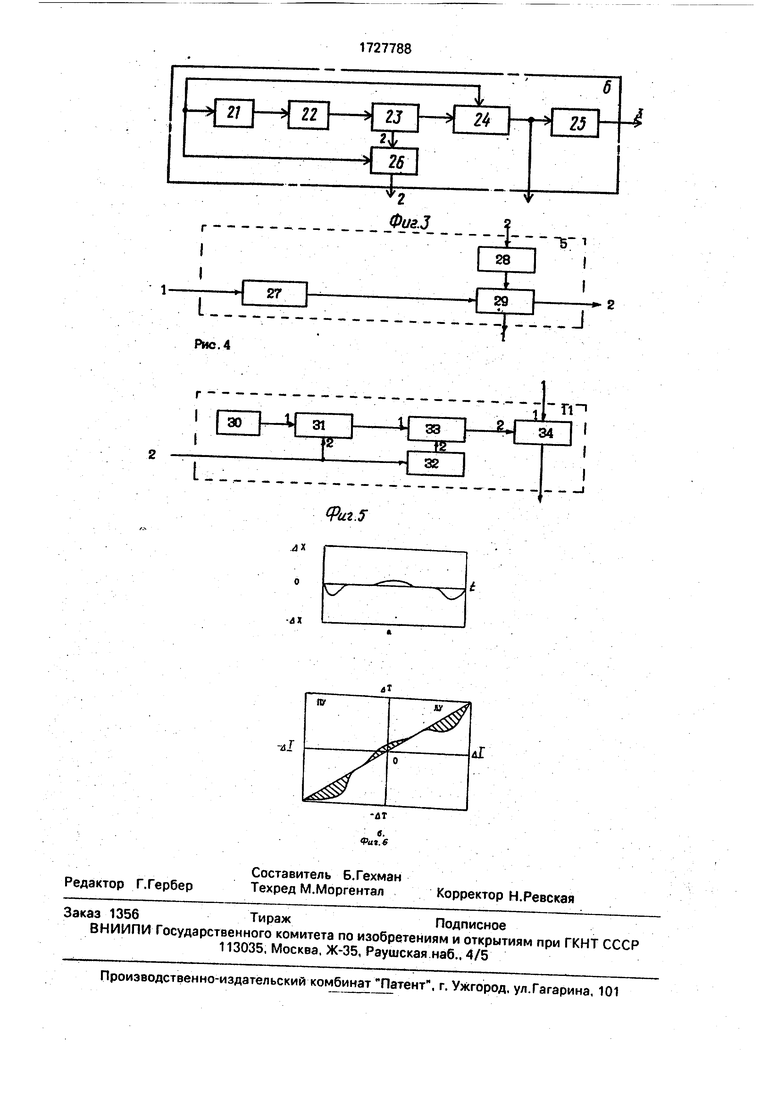
На фиг. 1 представлена блок-схема устройства для исследования восприятия движущегося звукового образа; на фиг. 2 - блок-схема генератора импульсов; на фиг. 3 - блок-схема задатчика исходной траектории; на фиг, 4 - блок разделения траектории; на фиг. 5 - блок-схема модулятора; на фиг, 6 - пример исследования взаимовлияния интерауральных параметров А Т и AI методом полной компенсации в горизонтальной плоскости: а) график изменения во времени величины отклонения ( А X) воспринимаемой траектории от задаваемой (исходной); б) график изменений интерауральных параметров при восприятии неподвижного 30, создаваемого путем полной компенсации движения.
Устройство для исследования восприятия движущегося 30 содержит блок 1 головных телефонов, являющихся выходом устройства, на каждый из которых из блока 2 двухканального генератора импульсов поступают прямоугольные импульсы. Входы блока 2 генератора импульсов подключены к первым выходам блока 3 первого ПЗУ и блока 4 второго ПЗУ, определяющих соответственно временную задержку между им- пульсами в каналах и различие в их амплитудах. Входы блоков 3 и 4 ПЗУ соединены с выходами блока 5 разделения траекторий, а его входы - с первым и вторым
0 выходами блока 6 задатчика исходной траектории. Третий выход блока б задатчика исходной траектории соединен с вторым входом блока 7 обработки информации, первый вход которого через блок 8 датчи5 ков, определяющих угол места и азимут воспринимаемого испытуемым 30, соединен с блоком 9 манипулятора, с помощью которого испытуемы-й отслеживает воспринимаемую им траекторию движения 30. Вторые
0 выходы блоков 3 и 4 ПЗУ через блок 10 цифроаналогового преобразования и блок 11 модулятора соединены с блоком 12 второго регистратора. При этом второй вход блока 11 модулятора соединен с выходом
5 блока 7 обработки информации и входом блока 13 первого регистратора. .
Генератор импульсов содержит первый регистр 14 для хранения текущего значения величины временной задержки импульсами
0 первого и второго каналов, являющихся его выходными сигналами, генератор 15, управляемый элемент 16 задержки, управляемые аттенюаторы первого 17 и второго 18 каналов, причем второй вход блока 2 генератора
5 импульсов подключен к второму регистру 19, на котором хранится абсолютное значение амплитуды импульса для первого канала генератора импульсов и текущее значение разности амплитуд его выходных
0 импульсов. Первый выход второго регистра 19 соединен с вторым входом управляемого аттенюатора первого канала 17 и первым входом сумматора 20, а второй выход - через второй вход сумматора 20 с вторым вхо5 дом управляемого аттенюатора второго канала 18.
Дополнительно к генератору 21. счётчику 22 адреса, запоминающему устройству 23, первому регистру 24 и цифроаналогово0 му преобразователю 25 в схему включен второй регистр 26 для хранения значения весовой функции, входы которого соединены с вторым выходом запоминающего устройства 23 и выходом генератора 21.
5 Блок 5 разделения траектории содержит первый регистр 27 для хранения значения координат точки исходной траектории и второй регистр 28 для хранения значения весовой функции, а их выходы соединены с входами ПЗУ 29.
Блок-схема модулятора 11 содержит генератор 30 модулирующей частоты, соединенный с первым входом амплитудного модулятора 31, управляющий вход которого соединен с вторым входом модулятора 11, а выход - с первым входом ключа 33, на управляющий вход которого через компара тор 32 поступает также сигнал с второго входа модулятора 11. и сумматор 34.
Остальные блоки предлагаемого уст- ройства, представленные на фиг. 1, не являются конструктивно новыми по отношению к известному. Имеются лишь функциональные отличия некоторых блоков.
Устройство работает следующим обра- зом.
Коды, соответствующие двумерной траектории движения 30, записанные в запоминающем устройстве 23 задатчика исходной траектории 6, и коды весовой фун- кции для составляющих траектории по временной задержке и по разности интенсивностей, записанные там же (например, в старших разрядах запоминающего устройства 23), поступают соответственно через первый 24 и второй 26 регистры на первый и второй входы блока 5 разделения траектории. Регистры 24 и 26 обеспечивают временную независимость работы блока 6 задатчика исходной траекто- рии по отношению к остальным блокам предлагаемого устройства, поскольку скорость движения 30 мала из-за физиологических особенностей восприятия и определяется частотой, задаваемой генера- тором 21.
В блоке 5 разделения траектории эти коды поступают на первый 27 и второй 28 регистры, выполняющие буферную функцию и обеспечивающие структурно-времен- ную независимость работы блока 5 относительно типа ПЗУ 29. Коды, поступающие с регистров 27 и 28 на адресные шины ПЗУ 29, для каждого значения заданной ве- совой.функции определяют координаты дву- мерной траектории движения 30 по составляющей, определяемой временной задержкой AT (выход 1 блока 5), и по составляющей, определяемой разностью интенсивностей А I (выход 2). С первого выхода блока 5 разделения траектории коды координат поступают на вход блока 3 первого ПЗУ, а с второго коды координат и абсолютное значение интенсивности звукового сигнала на первом канале - на вход блока 4 второго ПЗУ.
В блоках ПЗУ 3 и 4 реализованы функциональные зависимости соответственно величин временной задержки и разности
амплитуд выходных импульсов двухканаль- ного генератора 2 импульсов от текущих значений координат для каждой составляющей исходной траектории. Различия блоков
3и 4 заключаются в объеме (разрядности) входной и выходной информации. На адресные входы первого ПЗУ 3 поступают коды, соответствующие координатам точки траектории движения 30 по составляю щей, определяемой временной задержкой А Т, и их разрядность определяется требуемой точностью траектории движении 30. Разрядность его выходных шин определяется граничными условиями формирования движения и порогом восприятия скорости (по временной задержке ДТ). На адресные входы второго ПЗУ 4 поступают коды, соответствующие координатам точки траектории движения 30 по составляющей, определяемой разностью интенсивностью АI, Разрядность шин на входе блока 4, например, равна N, причем N М + К, где М - разрядность адресных шин ПЗУ, определяющая текуа(ую величину разности интенсивностей Ai на выходах устройства, К - разрядность адресных шин ПЗУ, определяющая абсолютное значение текущей величины амплитуды импульса по первому каналу генератора 2 импульсов. Выходные шины блока
4имеют разрядность X, причем X Y + К, где Y - разрядность кода разности амплитуд импульсов на выходах первого и второго каналов генератора 2 импульсов.
С первых выходов блоков ПЗУ 3 и 4 коды поступают соответственно на первый 14 и второй 19 регистры генератора 2 импульсов для управления временной задержкой и амплитудой импульсов в каждом канале. При этом амплитуда импульсов в первом канале задана непосредственно значениями кодов с первого выхода второго регистра 19 для управления аттенюатором 17, а амплитуда импульсов во втором канале - аттенюатором 18, управляемым алгебраической суммой кодов на сумматоре 20 этого кода и кода разности, поступающего с второго выхода второго регистра 19.
Выходные сигналы первого и второго каналов генератора 2 импульсов через головные телефоны 1 подаются на правое и левое уши испытуемого для прослушивания. С помощью манипулятора 9, укрепляемого на голове, испытуемый отслеживает траекторию воспринимаемого движения 30. Конструкция манипулятора 9 подробно описана в известном устройстве и его оси угла места и азимута жестко соединены с датчиками 8, например потенциометрическими. Выходные сигналы этих датчиков в виде электрических сигналов, пропорциональных углу места и азимуту относительно средней линии головы в плоскости, проходящей через слуховые проходы, поступают на вход блока 7 обработки информации, конструкция ко- торого упрощена по сравнению с известным - из блока исключен вход формирователя меток. Блок 7 обработки информации обеспечивает преобразование значений поступающих на первый его вход координат с датчиков 8 к виду, удобному для регистрации (например, в декартову систему координат) и осуществляет алгебраическое суммирование напряжений, пропорцио- нал ь н ых отел ежи ваемой ис п ытуемы м траек- тории и задаваемой траектории с третьего выхода блока 6 задатчика исходной траектории (по второму входу).
С выхода блока 7 обработки информации на блоке 13 первого регистратора фик- сируется в динамике сигнал отклонения траектории 30, воспринимаемой испытуемым, от исходной траектории, задаваемой задатчиком 6 исходной траектории. Пример регистрации сигнала отклонения в конкрет- ных условиях эксперимента приведен на фиг. 6, а. Этот же сигнал отклонения одновременно поступает на второй вход модулятора 11, в котором с помощью генератора 30 модулирующей частоты и амплитудного мо- дулятора 3f обеспечивается его заполнение модулирующей частотой. Сигнал отклонения траекторий в модуляторе 11 поступает также на вход компаратора 32, формирующего разрешающий потенциал при превы- шении сигнала отклонения траекторий заданного порогового значения, который обеспечиваетуправленйе ключом33, пропу- екающим лромодулированный сигнал отклонения на второй вход сумматора 34, где он алгебраически складывается с сигналами, пропорциональными изменениями ин- терауральных параметров А Т и.Д|, поступающими на первый вход модулятора 11 с выхода блока 10 цйфроаналогового преобразования. Таким образом, с выхода модулятора 11 оба интерауральных параметра, промаркированные сигналом отклонения траекторий, поступают для регистрации на блок 12 второго регистрато- ра, например двухкоординатНого самописца, что обеспечивает объективную оценку взаимовлияния интерауральных параметров ДТи Д при исследовании восприятия движущегося 30. Пример такой оценки при- веден на фиг. 6. б.
Для примера рассмотрим конкретное применение предлагаемого устройства для оценки взаимовлияния интерауральных параметров ДТ и Д I на восприятие неподвижного 30, задаваемого за счет.таких изменений во времени обоих интерауральных параметров, которые обеспечивают полную компенсацию движения 30. Поскольку известны статические характеристики восприятия неподвижного 30, имеющие нелинейный характер, эти характеристики однозначно определяют количественную зависимость значения каждого интерау- рального параметра (ДТ и ДI) от координат точки траектории и могут быть заданы в виде функциональной зависимости в соответствующем ПЗУ (блоки 3 и 4). В статике, количественно исследована компенсаторная зависимость между временной задержкой ДТ и разностью интенсмвностей Д I, что позволяет однозначно определить значение весовой функции для задатчика б тра- ектории. Так при движении 30 в горизонтальной плоскости по одномерной траектории (координата X) от правого уха к левому за счет интерауральных различий по времени ( ДТ) и при создании одновременного движения от левого уха к правому за счет интерауральных различий по интенсивности (Д I) при заданных в блоках 3 и 4 линейных изменениях интерауральных параметров Д Т и ДI испытуемый должен воспринимать неподвижный 30 в центре головы. Однако из-за нелинейностей характеристик восприятия и взаимовлияния интерауральных параметров ДТ и Д I в определенные моменты звуковой стимуляции испытуемым воспринимается движение 30. Благодаря объективной регистрации отклонения воспринимаемой траектории от исходной на первом регистраторе 13 (фиг. 6, а) и регистрации этого отклонения, привязанного к изменениям интерауральных параметров, на втором регистраторе 12 (фиг. 6,6) появляется возможность понять причины наблюдаемого феномена и количественно оценить взаимовлияние интерауральных параметров Д Т и Д I в данных условиях эксперимента: Из приведенных на фиг. 6 графиков следует, что при заданных (линейных) зависимостях изменения траектории движения 30 и выбранных динамических характеристиках каждого интераурального параметра не наблюдается полной компенсации движения 30, о чем свидетельствует наличие сигнала отклонения (фиг. 6, а). Максимальное отклонение воспринимаемой траектории от заданной имеют место при положении 30 вблизи ушных раковин, а также в центре головы, но они различны по величине и знаку. Очевидно, что взаимовлиянием интерауральных параметров ДТ и ДI
определяется движение 30 вблизи центра головы, а его движение вблизи ушных раковин прежде всего нелинейностью статических характеристик. Возможность проведения аналогичных исследований пу- тем последовательной коррекции функциональной зависимости значений каждого интераурального параметра от координат траектории обеспечит получение количественной оценки вклада AT и AI в их дина- мическое взаимодействие индивидуально для каждого испытуемого.
В предлагаемом устройстве для исследования восприятия движущегося 30 траектория его движения может быть задана в зависимости одновременно от двух интера- уральных параметров - временной задержки ДТ и разности интенсивностей АI. Это устройство обеспечивает однозначное решение задачи восприятия заданной траек- тории за счет введения весовой функции, определяющей вклад каждого интераурального параметра в формирование исходной траектории движения 30. Обеспечение регистрации в динамике одновременно откло- нения траектории, воспринимаемой испытуемым, от исходной и обеих интерау- ральных параметров позволяет исследовать их взаимовлияние на восприятие движущегося 30 при различных функциональных за- висимостях значений каждого параметра от координат задаваемой траектории. Вышеперечисленные преимущества предлагаемого устройства перед аналогами очевидны и его использование в исследованиях восп- риятия движущегося 30 открывают принци- пиально новые функциональные возможности таких исследований. Универсальность устройства обеспечивает новые перспективы исследования восприятия не-
подвижного 30 при реализации метода полной компенсации движения по одной составляющей ( AT) другой составляющей траектории (АI). Такие исследования позволят, вероятно, приблизиться к пониманию физиологических механизмов, лежащих в основе восприятия 30.
Формула изобретения Устройство для исследования восприятия движущегося звукового образа, содержащее последовательно соединенные манипулятор, датчики, блок обработки информации, задатчик исходной траектории, блок первого постоянного запоминающего устройства, генератор импульсов и головные телефоны, причем блок обработки информации подключен к первому регистратору, отличающееся тем, что, с целью исследования в динамике взаимовлияния интерауральных параметров на восприятие движущегося звукового образа, в него введены последовательно соединенные блок разделения траектории, блок второго постоянного запоминающего устройства, блок цифроаналогового преобразования, модулятор и второй регистратор, причем блок разделения траектории включен между задатчиком исходной траектории и блоком первого постоянного запоминающего устройства, его управляющий вход также соединен с задатчиком исходной траектории, кроме того второй выход блока первого постоянного запоминающего устройства соединен с вторым входом блока цифроаналогового преобразования, второй выход блока второго постоянного запоминающего устройства соединен с вторым входом генератора импульсов, а второй вход модулятора соединен с выходом блока обработки информации.
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для исследования восприятия движущегося звукового образа | 1983 |
|
SU1102567A1 |
| СПОСОБ ИССЛЕДОВАНИЯ НЕЙРОПСИХОЛОГИЧЕСКИХ МЕХАНИЗМОВ СТАНОВЛЕНИЯ ПРОСТРАНСТВЕННОГО СЛУХА У ДЕТЕЙ РАННЕГО ДОШКОЛЬНОГО ВОЗРАСТА | 2011 |
|
RU2454933C1 |
| СИСТЕМА МОНИТОРИНГА ПОЛЕТА | 2010 |
|
RU2409826C1 |
| СПОСОБ ИССЛЕДОВАНИЯ ПРОСТРАНСТВЕННОГО СЛУХА | 1993 |
|
RU2090139C1 |
| СПОСОБ ГРУППОВОГО ВОЖДЕНИЯ ДОРОЖНЫХ ДРОНОВ И СИСТЕМА ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2017 |
|
RU2662297C1 |
| СИСТЕМА СБОРА И РЕГИСТРАЦИИ ПОЛЕТНОЙ ИНФОРМАЦИИ | 2006 |
|
RU2313827C1 |
| СИСТЕМА СБОРА И ОБРАБОТКИ ПОЛЕТНОЙ ИНФОРМАЦИИ | 2006 |
|
RU2319203C1 |
| УСТРОЙСТВО УПРАВЛЕНИЯ АДАПТИВНЫМ МОБИЛЬНЫМ РОБОТОМ | 1998 |
|
RU2143334C1 |
| Задающее устройство для цифрового следящего привода | 1986 |
|
SU1411709A1 |
| ПРОЦЕССОР ОБРАЗОВ КУЩЕНКО В.А. | 2008 |
|
RU2399093C2 |
Устройство для исследования восприятия движущегося звукового образа относится к медицинской технике и может быть использовано для исследования пространственного слуха и влияния интерауральных параметров стимулирующего звукового сигнала на восприятие звукового образа, а также для диагностики поражений головного мозга. Устройство содержит головные телефоны 1, генератор 2 импульсов, постоянные запоминающие устройства 3, 4, блок 5 разделения траекторий, зэдатчик 6 исходной траектории, блок 7 сумматора, датчики 8, манипулятор 9, блок 10 цифроаналотового преобразования, модулятор 11, регистраторы 12, 13, 9-8-7-6-5-4-10-11-12. 5-3-2-1. 3-10. 7-13,7-11,4-2. бил.
| Устройство для исследования восприятия движущегося звукового образа | 1983 |
|
SU1102567A1 |
| Устройство для сортировки каменного угля | 1921 |
|
SU61A1 |
