к регулируемому источнику питания фазных обмоток ротора, первый и вто:рой выходы генератора опорных функций соединены с соответствующими BXO-I дами для опорных Функций третьего
координатного преобразователя, а входы блока задания скорости вращения системы координат; соединены с выходами генератора низкочастотных колеба ний и блока задания скорости вращения


| название | год | авторы | номер документа |
|---|---|---|---|
| Электропривод переменного тока | 1979 |
|
SU928584A1 |
| Устройство для управления электрической машиной с фазным ротором | 1977 |
|
SU720652A1 |
| Электропривод с асинхронной машиной с фазным ротором | 1975 |
|
SU610275A1 |
| ЧАСТОТНО-РЕГУЛИРУЕМЫЙ АСИНХРОННЫЙ ЭЛЕКТРОПРИВОД | 2008 |
|
RU2401502C2 |
| Частотно-регулируемый электропривод | 1988 |
|
SU1605307A1 |
| СИСТЕМА ВЕКТОРНОГО УПРАВЛЕНИЯ СКОРОСТЬЮ АСИНХРОННОГО ЭЛЕКТРОДВИГАТЕЛЯ | 2006 |
|
RU2317632C1 |
| Электропривод | 1981 |
|
SU1083319A1 |
| Электропривод с асинхронной машиной с фазным ротором | 1979 |
|
SU1108597A2 |
| СПОСОБ ВЕКТОРНОГО УПРАВЛЕНИЯ СКОРОСТЬЮ ВРАЩЕНИЯ ТРЕХФАЗНОЙ МАШИНЫ | 2013 |
|
RU2557071C2 |
| ЧАСТОТНО-РЕГУЛИРУЕМЫЙ АСИНХРОННЫЙ ЭЛЕКТРОПРИВОД | 2006 |
|
RU2313894C1 |
Изобретение относится к электротехнике, а точнее к- частотно-управляемым электроприводам, построенным на основе асинхронных двигателей с фазным роторомS и может быть использовано, например, для реверсивных электроприводов в металлургической промыш ленности или других отраслях нароД него хозяйства, где определяющими требовани:яыи являются мощность, высокёя динамика, высокая скорость вращен.ия.
Известен электропривод с асинхронным двигателем с фазным ротором, содержащий блок заданий скорости вращения , связанный через регуляторы составлящих потокосцепления ротора и первый координатный преобразователь с регулируек« 1м источником питания фазных обмоток ротора, второй координатный преобразователь, подключенный входами к датчикам фазных.токов статора и ротора, а выходами - к соответствующим входам обратных связей регуляторов составляющих потокосцепления ротора и входам блока компен сирующих внутренних обратных связей статора и ротора, датчик скорости вращения и датчик углового положения ротора, связанный с входами для опорных функций первого и второго координатных преобразователей Cl J.
Недостатком известного электропривода является низкий диапазон регулирования скорости вращения, обусловленный применением регулируемого источника питания только для питания фазных обмоток ротора.
Наиболее близким к изобретению те) ническим решением является электропривод с асинхронным двигателем с фазным ротором, содержащий блок задания скорости вращения, связанный через регуляторы составляющих по,токосцепления статора в ортогональных осях системы координат, вращающейся с полем двигателя, и первый координатный преобразователь с регулируемым источником питания фазных обмоток статора, а через второй координатный преобразователь и регуляторы составляющих потокосцепления ротора в ортогональных осях системы координат, вращающейся с полем двигателя,- с регулируемым источником питания фазных обмоток ротора, генератор Низкочастотных колебаний, связанный с входами для опорных функций первого и второго координатных преобразователей, третий координатный преобразователь, подключенный входами к датчикам фазных токов статора и ротора, а выходами - к соответствующим входам обратных связей регуляторов составляющих потокосцеплений статора и ротора и входам блока компенсирующих обратных связей, выходы которого связаны с входами компенсации регуляторов составляющих потокосцеплений статора и ротора, датчик Скорости вращения ротора, связанный выходами с другими входами блока компенсирующих обратных связей и регуляторов составляющих потокосцеплений статора и ротора, датчик углового положения ротора, связанный с входами для опорных функций первого, второго и третьего координатных преобразователей 2).
Недостатками данного электропривода являются невысокое качество работы и низкие энергетические показатели .
Цель изобретения - повышение качества работы.
Указанная цель обеспечивается тем, что в электропривод с асинхронным двигателем с фазным ротором, содержащий блок задания скорости вращения, связанный через регуляторы составляющих потокосцепления статора
в ортогональных осях системы координат, вращающейся с полем Авигателя, и первый координатиый преобразователь с регулируемым источником питания. фазных обмоток статора, а через второй координатный преобразователь и регуляторы составляющих потокосцепления ротора в ортогональных осях системы координат, вращающейся с полем двигателя, - с регулируемым источником питания фазных обмоток ротора, генератор низкочастотных колебаний, связанный с входами для опорных функций первого и второго координатных преобразователей, третий координатный преобразователь, подключенный входами к датчикам фазных токов статора и ротора, а выходами - к соответствующим входам обратных связей регуляторов составляющих потокосцеплений статора и ротора и входам блока компенсирующих обратных связей, выходы которого связаны с входами компенсации регуляторов составляющих потокосцеплений статора и ротора, датчик скорости вращения ротора, связанный выходами с другими входами блока компенсирукзщих обратных связей и регуляторов составляющих потокосцеплений статора и ротор а, датчик углового положения ротора, связанный с входами для опорных функций первого, второго и третьего координатных преобразователей, введены последовательно соединенные блок задания скорости вращения системы координат и генератор опорных функций) датчик углового положения ротора выполнен в виде датчика импульсов, а датчик скорости вращения ротора - в виде блока вычислений, соединенного первым входом с выходом датчика импульсов, а вторым входом - с выходом блока задания скорости вращения системы координат, при.этом второй вход генератора опорных функций подключен к ВЫХОДУ датчика импульсов, первые выходы соединены с входами для опорных функций первого координатного преобразователя, вторые выходы соединены с входами для опорных функций второго координатного преобразователя, подключенного входами к выходам регуляторов составляющих потокосцепления ротора в ортогональных осях системы координат, вращающейся с полем двигателя, а выходами - к регулируемому источнику питания фазных обмоток ротора, первый и второй выходы генератора опорных функций соединены с соответствующими входами для опорных функций |Третьего координатного преобразователя, а входы блока задания скорости вращения системы координат соединены с выходами генератора низкочастотных колебаний и блока задания скорости вращени я.
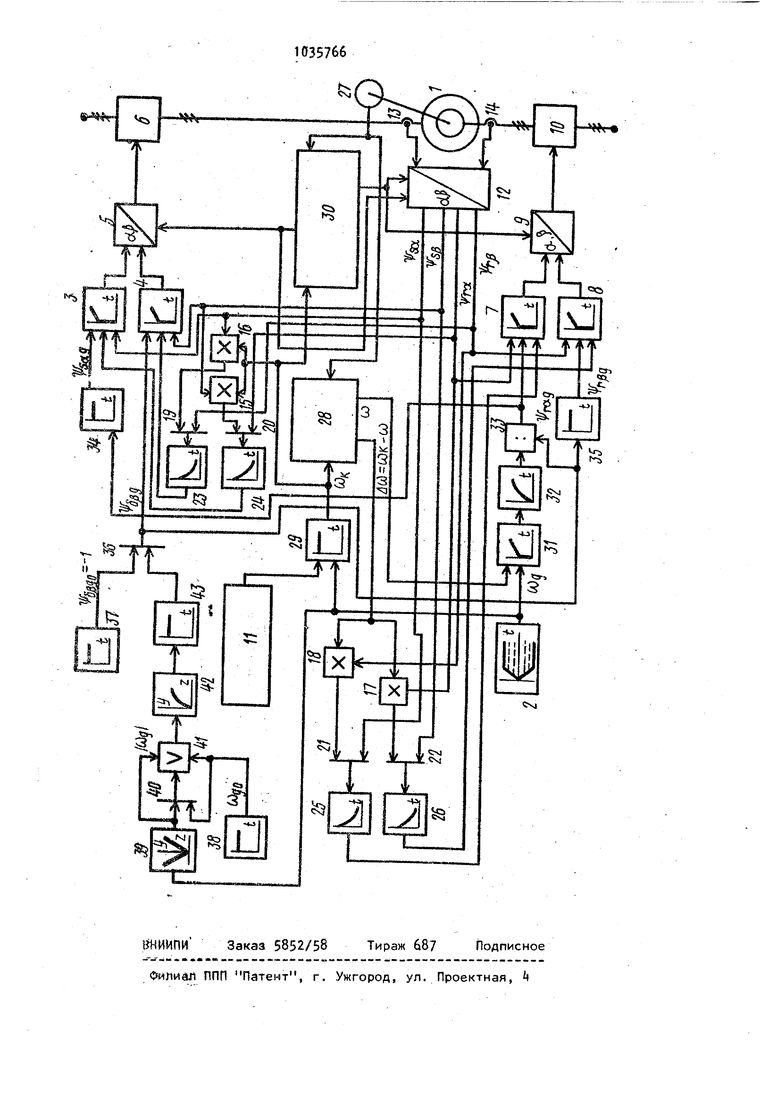
0 На чертеже представлена структурная схема предлагаемого электропривода с асинхронным двигателем с фазным ротором.
Электропривод содержит асинхронный двигатель .1 с фазным ротором, блок 2 задания скорости вращения, связанный через регуляторы 3 и ч составляющих потокосцепЛёИия статора соответственно в осях d и /3 вращающейся с полем двигателя системы ко0ординат и первый координатный преобразователь 5 с регулируемым источником 6 питания фазных обмоток статора асинхронного двигателя 1. Блок 2 задания скорости вращения связан
5 также через регуляторы 7 и 8 составляющих потокосцепления ротора соответственно в осях Ы л р вращающейся с полем двигателя системы координат и второй координатный npieo6pa0Эователь 9 с регулируемым источни;ком 10 питания фазных обмоток ротора. Генератор 11 низкочастотных колебаний связан с входами для опорных функций координатных преобразователей 5 и 9- Третий координатный преобразователь 12 подключен входами к датчикам 13 и 1 фазных токов статора и ротора, а выходами - к соответствующим входам обратных связей
регуляторов 3 и А составляющих потокосцепления статора, регуляторов 7 и 8 составляющих потокосцепления ротора и входам блока компенсирующих обратных связей статора и ротора, составленного из умножителей 15-18, сумматоров 19-22 и корректирующих звеньев 23 - 2б. Выходы корректиругацих звеньев 23 и 2k соединены с входами компенсации регуляторов. и
0 3 соответственно, а выходы корректирующих звеньев 25 и 26 - с входами компенсации регуляторов 7 И 8 соответственно. На валу асинхронного двигателя установлен датчик 27 импульсов, подключенный к датчику 28 скорости вращения ротора, выполненному в виде блока вычислений и связанный с входами для опорных функций координатных преобразователей 5, 9 и 12. D электропривод введен блок 29 задания скорости вращения системы координат, соединенный выходом с первым входом генератора 30 опорных функций, другой вход которого подключен к выходу датчика 27 импульсов. Первые выходы генератора 3 опорных функций соединены с входами для опорных функций первого и треть его координатных преобразователей 5. и 12, а вторые, выходы - с входами для опорных -функций второго и третьего координатных преобразователей 9 и 12. Входы блока 29 задания скорости вращения.системы координат соединены с выходами генератора 11 низкочастотных колебаний и блока 2 задания скорости вращения.. , &ХОДЫ умножителей 15 и 16 блока компенсирующих связей соединены с вы кодом блока 29 задания скорости вращеНйя системы кoopдинat, а входы умножителей 17 и 18 - с одним из выходов датчика 28 скорости вращени ротора V Выход блока 2 задания, скорости вращения соединен с входом задания регулятора 7 через последовательно соединённые регулятор 31, согласующий фильтр 32 и делитель 33 Вход задания регулятора 3 подключен к вы ходу задатчика З уровня потокосцеп ления статора по оси cL , вход которого соединен с выходом делителя 33 Вход задания регулятора 8 через масштабный элемент 35 соединен с вы ходом сумматора Зб, первый вход которого подключен к выходу задатчика 37 уровня основного потокосцепления статора по оси (Ъ , Вход задания per лятора и второй вход делителя 33 соединены с выходом сумматора Зб не посредственно. Второй вход сумматор 36 соединен с блоком ослабления пол составленным из задатчика 38 диапазона основной скорости вращения ротора, нелинейного элемента 39, сумматора 40, логического элемента fl, нелинейного элемента 2, масштабного элемента Выход нелинейного элемента 39 соединен с выходом блока 2 задания скорости вращения. Электропривод работает следующим образом. . В первой зоне регулирования скорости, когда задание по скорости, определяемое блоком 2 задания, ле66жит в пределах (ы„ ки(у , сигнал ослабления поля, поступающий на вход сумматора 36, равен нулю, т.е. . При этом нелинейный элемент 39 имеет характеристику у«х, а нелинейный элемент - характеристику .-, где X . На выходе сумматора Зб в рассматриваемой зоне формируется постоянное задание, рав c V s;соответствующее осйЬвндАУ. Потокосцеплению статора двигателя по оси / . За счет действия регуляторов 3 и составляющие потокосцепления статора поддерживаются на уровнях Ы - ш jjQ 5оО 5Ыс5 -з-) Ц1 -ц; m / 5fb где К - коэффициент, характеризующий долю статора в создании основного пото ка; момент нагрузки на валу ,. двигателя 1. Блок 2 задания уст анавливает уровень. задания ( скорости вращения двигателя 1, а также определяет задание скорости вращения lU. системы координат., через датчик 9-по соотно-, шению i . UP q5c4j 4Д% гдeДu ||,J - амплитуда и частота колебаний скорости вращения системы координат, задаваемые генератором 11, который служит для предотвращения неравномерной загрузки фаз двигателя 1 током в режиме упора (стоянки с номинальным моментом), В указанном режиме возможно протекание по фазам двигателя 1 Постоянных токов, в частности, в одной из фаз может оказаться постоянный ток, равный максимальному значению номинального тока. В остальных фазах при этом поддерживаются также постоянные токи, но равные по величине половине от их максимальных значений. При этом в фазе, где постоянный ток равен максимальному значению, выделяется в два раза больше тепла, чем в случае, если то переменный. Это приводит к перегреву нерегулируемой фазы и выходу дви гателя из строя. Указанное явление устраняется с помощью генератора 11 низкочастотных колебаний, обеспечивающего протекание в фазах двигател V переменных токов. Токи статора и ротора двигателя в стационарных режимах изменяются н с постоянной частотой, а с изменяющейся около среднего значения, равного . . . Если в режиме вращения ,f ij положить сопротивление фазы статора , то .можно получить составляю щие напряжения статора Usot - 0.5 sp Usf5 05 - soLcy Задания составляющих потокосцепления ротора за счет действия регуляторов 7 и 8 поддерживаются на уро V Ф - J rot го(Ц tf V )t H+f V V V x r V9S V r х„ / Г/ где К - коэффициент, характеризующ долю ротора в создании ос новного потока. Напряжение ротора (если сопроти ление фазы ротора г.0) определяетс составляющими .5 rotc 1оки статора и ротора двигателя определяются по соотношениям , Ы m е«5 V/, rot-у Xm Во второй зоне регулирования .ско рости, когда задание по скорости , 66 ta выходе суммирующего элемента Зб ормируется задание потбкосцепления %. V f 2fl, v/i«5 .l :. т.е. поток двигателя .понижается с острм задания его скорости. Наличие в электроприводе регуляторов 7 и 8 составляющих потокосцепления ротора и регуляторов 3 и i с6ставляющих потокрсцепления статора обеспечйеает поддержание требуемого момента и целесообразного энергетического режима для двигателя 1. В частности, изменяя коэффициенты К с и регуляторов, можно выбрать ре5п ft что бывает важным при умете существенно разных условий теплоотдачи статора и ротора. Возможность перераспределения токов статора и ротора двигателя t , улучшает энергетические показатели электропривода. Таким образом, применение в электроприводе раздельного питания для фазных обмоток статора и ротора, а также использование систе 1 координат с регулируемой скоростью вращения позволяют обеспечить питание обмоток статора и ротора двигателя токами одинаковой частоты, что также определяет повышение качества работы и возможность улучшения энергетических показателей привода. При этом к двигателю не предъявляются специальные требования в части симметрирования параметров статора и ротора. Кроме того, предусмотренное в электроприводе двухзонйое регулирование скорости позволяет осуществить регулирование с минимальной установленной мощностью источников питания фазных обмоток двигателя. Итак, введение в предлагаемый электропривод генератора опорных функций, управляемого от блока задания скорости вращения системы координат, позволяет обеспечить необходимое перераспределение токов статора и ротора, повысить качество работы и улучшить энергетические показатели.
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Электропривод с синхронным двигателем | 1972 |
|
SU518851A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
