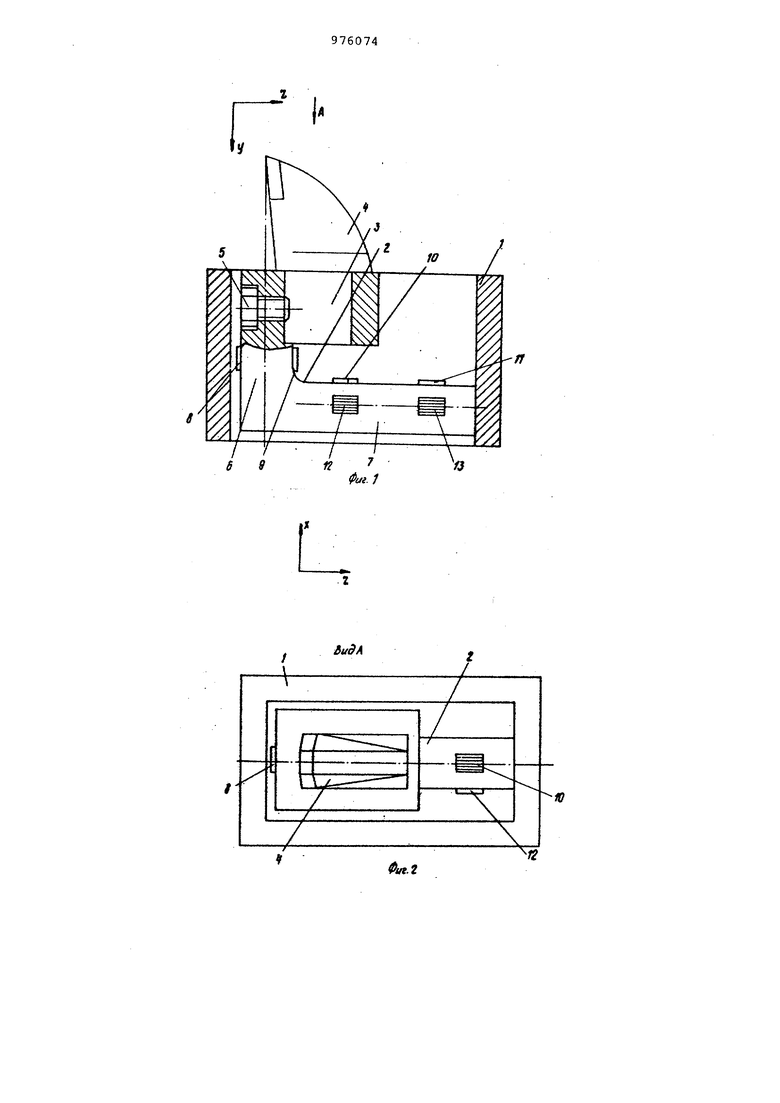
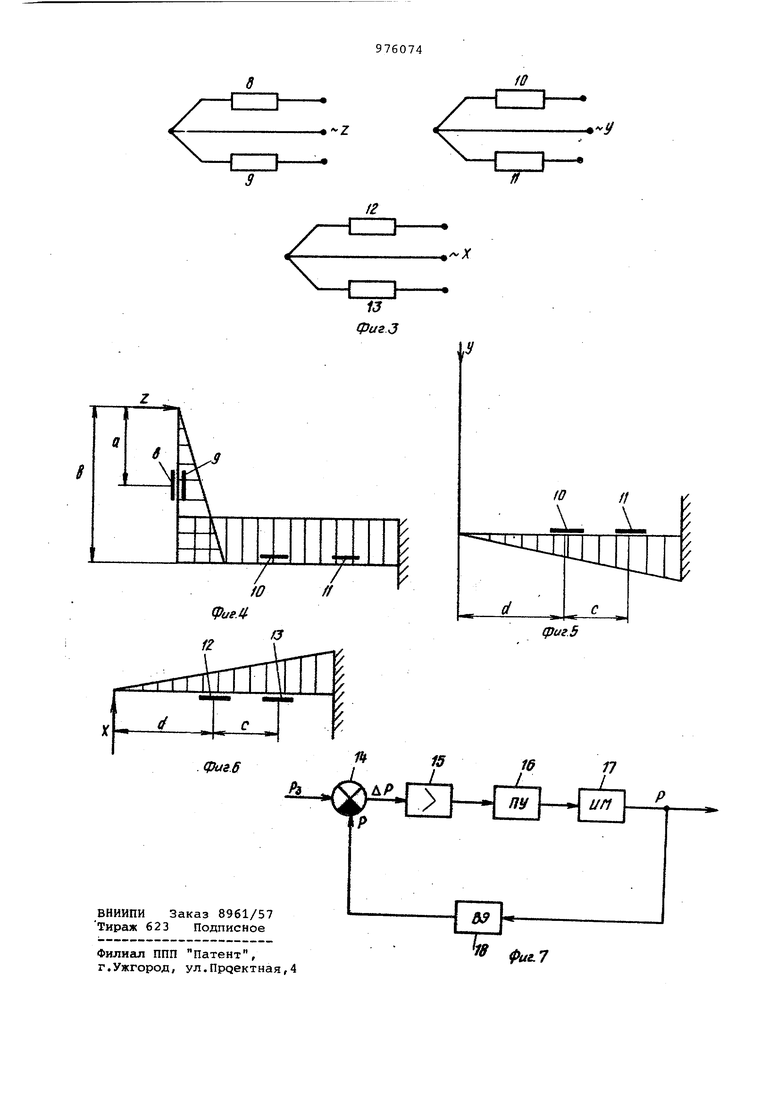
вращающемся исполнительном органе, и усилитель, подсоединенный к исполнительному механизму, сжимакяцуюся кнопку, которая сжимается при поворо те измерительного резца вокруг оси под действием силы резания, датчик с радиопередатчиком и приемник, выход которого соединен с усилителем. При выемке полезного ископаемого резец под действием силы резания поворачивается относительно поперечной оси и нажимает державкой на датчик электрических сигналов. При этом дат генерирует электрические сигналы которые поступают к передатчику радиосигналов. Последний передает радиосигналы, соответствующие указанны электрическим сигналам. По значению радиосигналов можно судить о силе ре зания, действующей на резец 2.. Недостатком этого устройства явля ется низкая точность измерений, а следовательно, низкая эффективность управления машиной из-за невозможнос ти дифференцированного измерения тре взаимно перпендикулярных сил, деиствующих на резец (резания, подачи и боковой). Сила подачи, имея плечо приложения относительно поперечной оси резца, будет поворачивать резец. В результате этого державк будет отклоняться от датчика электрических сигналов. Момент силы резания относительно поперечной оси резца, наоборот, стремится Повернуть державку резца к датчику электриче(ких сигналов. Таким образом, показания датчик будут искажены наводками от силы подачи. Аналогичное влияние на показания датчика будут оказывать боковые Кроме того, при повороте резца относительно поперечной оси в шарнире будет возникать момент трения, ко торый будет также искажать показания датчика. Целью изобретения является повышение точности управления горной машиной . Указанная цель достигается тем, что устройство для управления горной машиной, содержащее измерительный ре зец, закрепленный в корпусе, располо женном на вращаюгцемся исполнительном органе, и усилитель, подсоединенный к1 исполнительному механизму, снабжен Г образной рамкой, шестью тензоэлементами и элементом сравнения, приче Г-образная рама одним концом жестко прикреплена к корпусу, а на другом свободном ее конце выполнено гнездо, в котором установлен измерительный резец, при этом тензоэлементы закреп лены попарно на раме в трех взаимно перпендикулярных плоскостях и попарно по вычитающей схеме подключены к входам элемента сравнения, выход которого соединен с входом усилителя. Такое выполнение позволяет дифференцированно измерять три взаимно перпендикулярные силы (резания, поачи и боковую) и учитывать их ггри управлении горной маминой. На фиг.1 показано устройство для управления горной машиной, общий вид, разрез; на фиг. 2 - вид А на Фиг.1, на фиг.З - схемы соединения тензоэлементов; на фиг. 4-б - схег/и нагружения 5/стройства, на фиг. 7 - блоксхема систе1 ы управления машиной. Устройство для управления горной машиной представляет собой коробчатый корпус 1. Внутри корпуса 1 расположена Г-образная рама 2, которая одним из концов жестко прикреплена к корпусу 1 с помощью сварки, пайки и т.д. Другой конец рамы 2 расположен в корпусе 1 свободно, с делью обеспечения возможности перемещения рамы 2 при приложении к устройству усилий. В свободном конце рамы 2 выполнено гнездо 3, в котором установлен изме-. рительный резец 4. Резец 4 зафиксирован от выпадения из гнезда 3 болтом 5. Крепление резца 4 может быть осуществлено также винтом или каким-либо другим способом. Ось симметрии балки б рамы 2 совпадает с линией действия силы подачи У. На балках б и 7 рамы 2 установлены тензоэлементы 8-13. Тензоэлементы 8 и 9 устацовлены на балке б рамы в плоскостях, перпендикулярных плоскости действия силы резания Z, и предназначены для измерения этой силы. Тензоэлементы 10, 11 и 12, 13 установлены с одинаковой базой с на балке 7 рамы 2 в плоскостях, перпендикулярных соответственно плоскости действия силы подачи У и плоскости действия боковой силы X. Тензоэлементы 10 и 11 предназначены для измерения силы У, а 12 и 13 - для измерения силы X. Схемы попарного соединения тензоэлементов (фиг.З) - вычитающие. Тензоэлементы 8-13 связаны с системой управления. Система управления горной машиной включает в себя элемент 14 сравнения, усилитель 15 (при необходимости усиления управляющего сигнала), передаточное устройство 16, исполнительный механизм 17 и воспринимающий элемент 18, в качестве которого применены тензоэлементы. Таким образом резец 4 связан с системой управления посредством тензоэлементов 8-13. С целью защиты тензоэлементов 8-13 от внешней среды корпус 1 сверху закрыт крышкой (не показан). Корпус 1 с резцом 4 установлен на исполнительном органе горной машины (не показан) в специальном гнезде. Устройство работает следующим образом. При разрушении исполнительным органом массива полезного ископаемого на резец 4 будут действовать силы ре зания, подачи и боковая (Z, X, Y). Вследствие того, что резец 4 установ лен соответствующим образом в гнезде 8 Г-образной рама 2 и закреплен в нем болтом 5, а сама рама 2 одним из концов жестко связана с корпусом 1, эти силы будут вызывать деформации балок б и 7 рамы 2. Эти деформации воспринимаются тензоэлементами 8-13, которые вырабатывают электрические сигналы, пропорциональные деформациям балок 6 и 7, а следовательно, и силам, вызвавшим эти деформации. Сила 2 измеряется при помощи тензо лементов 8 и 9, сила У при помощи тензоэлементов 10 и 11,. а сила X -- при помощи тензоэлементо 12 и 13. Сигналы, вырабатываемые тензоэлементами, поступают к элементу 14 сравнения, на который подается также сигнал Р-, на который настраивается система до начала работы. В случае неравенства сигналов Р и Р-ч- элемент 14 сравнения выработ ет сигнал рассогласования . Этот сигнал усиливается при необходимости усилителем 15 и через передаточное устройство 16 подается к исполнительному механизму 17, Исполнительный механизм 17 отработает рас согласование до тех пор, пока не наступит равенство P-P-j. Кроме того, сигналы от тензоэлементов 8-13 могут быть поданы на регистрирующую аппаратуру при проведении шахтных или стендовых испытаний горных машин. Сила резания Z будет вызывать деформации балок 6 и 7 рамы 2 (фиг.4). Показания тензоэлементов 8 и 9 определяются значением силы Z и плечом ее приложения а. Применив вычитающую схему соединения тензоэле ментов 10 и 11, удается компенсировать сигналы ошибки от силы Z для этих тензоэлементов: Z-b-Z-b 0. Значения выходного сигнала тензоэле ментов 10 и 11 будут определяться значением силы подачи У и их базой установки с, при вычитающей схеме соединения тензоэлементов 9 и 10, (фиг.5): Y .(c-bd) -Y- d 0 . Сигнал ошибки от силы Y на показани тензоэлементов В и 9 компенсируется тем, что направление действия этой силы -совпадает с осью симметрии бал б. Это приводит к тому, что балка .6 будет не изгибаться, а сжиматься силой . Таким образом, сигнал ошибки у тензоэлементов 8 и 9 будет одина ; ковым по величине и знаку. Следовательно, применив вычитающую схему соединения тензоэлементов 8 и 9, удается компенсировать сигнал ошибки. Значения выходного сигнала тензсэлементов 12 и 13 определяются значением силы X и базой их установки с, аналогично тензоэлементам 10 и 11 (фи г.6) : Х-() . Дифференцированное измерение трех взаимно перпендикулярных сил , действующих на резец горной машины, позволяет с высокой точностью регулировать высоту исполнительного органа по мощности пласта, высоту комбайна относительно почвы пласта или опорной по верхности конвейера, скорость подачи горной машины и т.д. Это позволяет повысить эффективность управления горной машиной примерно на 25%, что приведет к сокращению потерь рабочего времени на операции, связанные с управлением горной машиной на 15%, а также обеспечить повышение производительности горной машиной. Формула изобретения Устройство для управления горной машиной, содержащее измерительный ре- зец, закрепленный в корпусе, расположенном на вращающемся исполнительном органе, и усилитель, подсоединенный к исполнительному механизму, отличающееся тем, что, с целью повышения точности управления, оно снабжено Г-образной рамой, шестью тензоэлементами и элементом сравнения, причем г-образная рама одним концом жестко прикреплена к корпусу, а на другом свободном ее конце выполнено гнездо, в котором установлен измерительный резец, при этом тензоэлементы закреплены попарно на раме в трех взаимно перпендикулярных плоскостях, и попарно по вычитающей схеме подключены к входам элемента сравнения, выход которого соединен с входом усилителя. Источники информации, принятые во внимание при экспертизе 1.Авторское свидетельство СССР № 619117, кл. Е 21 С 25/06, 1969. 2.Патент США № 4181360, кл. 299-1,опублик. 01.01.80 (прототип) .
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для управления горной машиной | 1983 |
|
SU1116158A1 |
| Исполнительный орган горной машины | 1983 |
|
SU1104259A1 |
| Исполнительный орган горной машины | 1982 |
|
SU1145130A1 |
| Стенд для исследования процессов резания грунта рабочим органом землеройной машины | 1978 |
|
SU1280366A1 |
| Копер для испытания резцов горных машин на ударную прочность | 1978 |
|
SU868391A1 |
| СТЕНД ДЛЯ ИССЛЕДОВАНИЯ СОПРОТИВЛЕНИЯ ГОРНЫХ ПОРОД РЕЗАНИЮ | 2023 |
|
RU2807004C1 |
| УСТРОЙСТВО ДЛЯ ОПРЕДЕЛЕНИЯ СОПРОТИВЛЯЕМОСТИ ПОРОД РЕЗАНИЮ | 2013 |
|
RU2532955C1 |
| УГЛЕДОБЫВАЮЩИЙ АГРЕГАТ | 1996 |
|
RU2130553C1 |
| Способ автоматического управления комбайном по гипсометрии пласта и устройство для его осуществления | 1981 |
|
SU987094A1 |
| Датчик давления | 1989 |
|
SU1744530A1 |
ЛидЛ
