9
СП
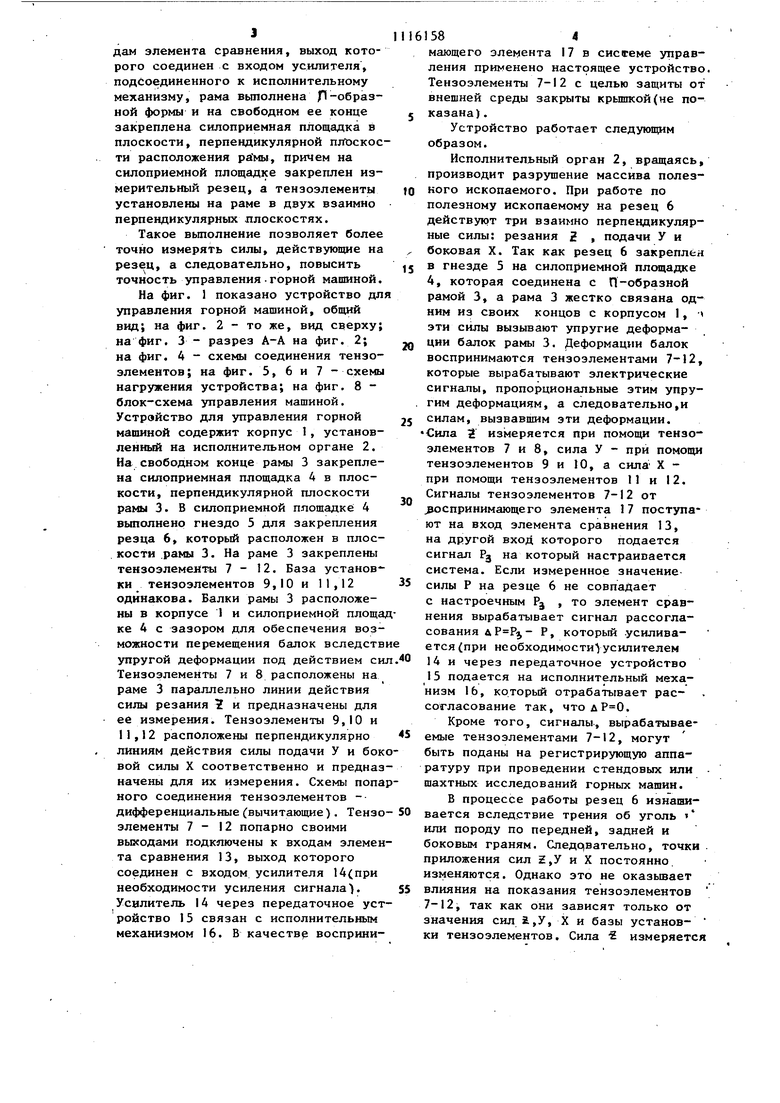
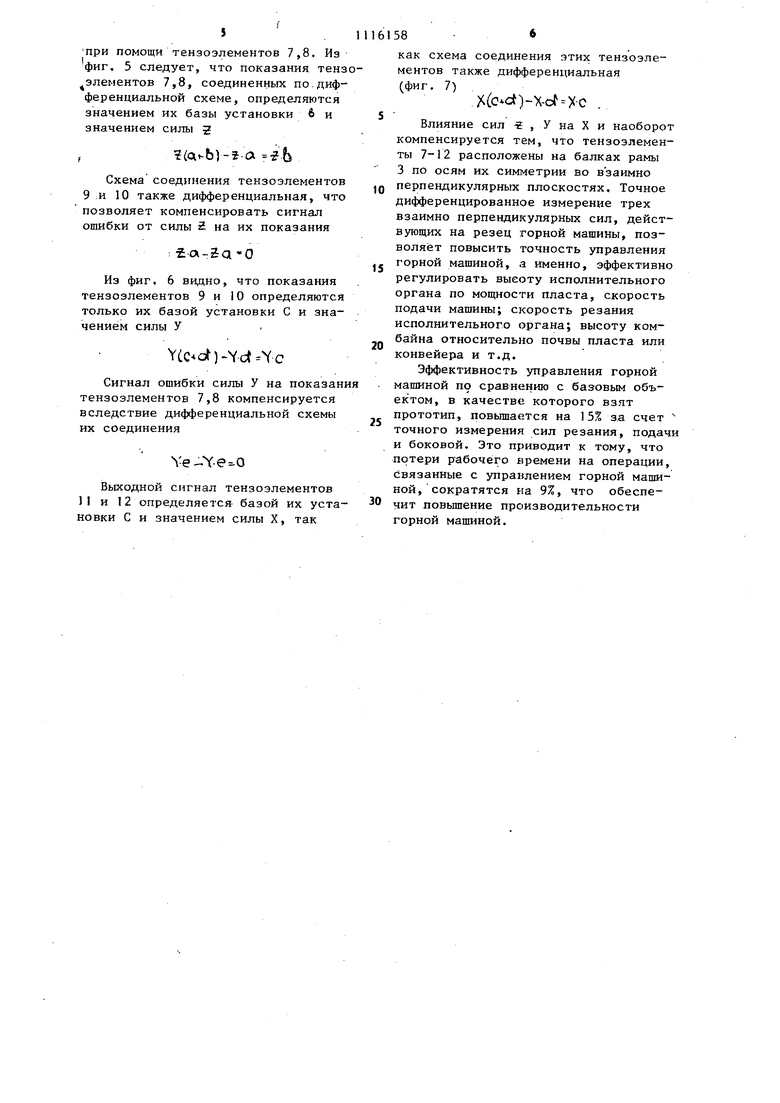
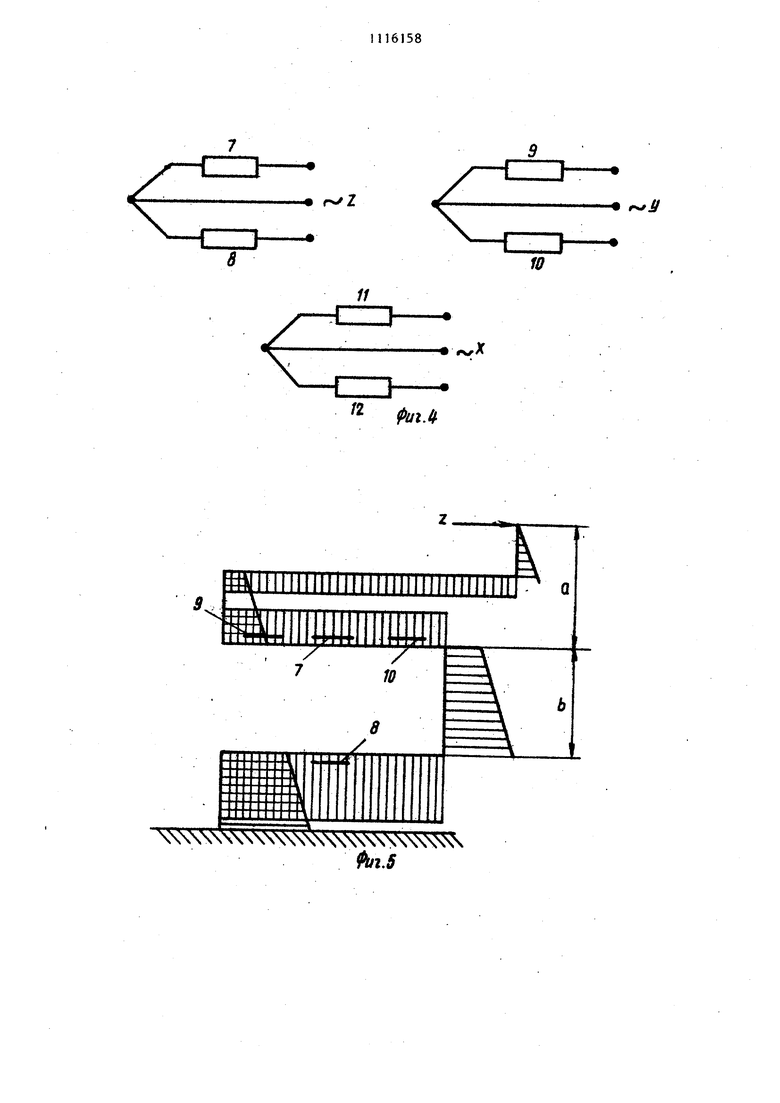
00 , Изобреаение относится к горному делу, к устройствам для определения усилий, действующих на резец исполнительного органа горной машины, и может применяться для эффективного управления горной машиной, а также для экспериментальных иссле дований. Известно устройство для измерения усилий, действующих на резец горной машины. Машина для выемки полезного ископаемого имеет режущую головку с возможностью вращения и гнездом для закрепления резца. Резец имеет поперечную ось вращения Между передней частью державки резца и стенкой гнезда установлен датчик, генерирующий электрические сигналы. Датчик соединен с радиопередатчиком, установленным на рЬжу щей головке 11. При разрушении полезного ископае мого резец под действием силы резания поворачивается вокруг поперечной оси. Державка нажимает на датчи электрических сигналов, которые пропорциональны усилиями резания. Эти сигналы поступают к радиопереда чику, а от него - к радиоприемнику или управляющему устройству. Недостатком известного устройства является низкая эффективность управления горной машиной, так как устройство не учитывает влияние на управление машиной трех взаимно перпендикулярных сил в отдельности силы, действующей на переднюю грань резца{силы резаният; силы, действую щей на заднюю грань резца (силы пода силы, действующей на боковые грани резца боковой силы V Сила подачи поворачивает резец от датчик электрических сигналов, так как имеет плечо приложения относительно поперечной оси резца. Момент силы резания относительно поперечной оси резца наоборот поворачивает державку резца к датчику электрических сигналов. Таким образом, показания датчика искажены наводкам от силы подачи. Аналогичные наводки на показания датчика оказывают боковые силы. Кроме того, момент . трения в шарнире резца также искажае показания датчика. Известно устройство для управлен горной машиной, содержащее корпус, расположенный на исполнительном орг не, раму, один конец которой уестко 58J связан с корпусом, шесть .тензоэлементов, подключенных попарно по дифференциальной схеме к входам элемента сравнения, выход которого соединен с входом усилителя, подсоединенного к исполнительному механизму, а на другом свободном ее конце установлен измерительный резец {21, Воспринимающий элемент устройства содержит корпус с гнездом для резца. Корпус снабжен Г-образной рамой, один конец которой жестко связан с корпусом, а на свободном конце рамы закреплен резец. На балках рамы расположены тензоэлементы, связанные с системой управления машиной. При разрушении полезного ископаемого силы резания, подачи и боковая сила изгибают измерительные балки Г-образной рамы. Деформации балок воспринимаются тензрэлементами, которые вырабатывают электрические сигналы, пропорциональные силам. Эти сигналы поступают в систему управления машиной на регистрирующую аппаратуру при проведении исследований. Недостатком известного устройства является низкая точность управления. горной машиной. Показания тензоэлементов, измеряющих силу резания, определяются значением зтой силы и плечом её приложения. В процессе работы передняя грань резца изнашивается следовательно плечо приложения силы резания и показания тензозлемеитов(хотя сила резания может оставаться постоянной по величине)меняются. В процессе работы также наблюдается износ резца по задней грани. Это приводит к тому, что линия действия силы подачи смещается от оси измерительной балки Г-образной рамы. Следовательно, будет иметь место косой изгиб балки, что обусловит искажения показаний тензоэлементов. При помощи которых измеряется сила резания. Все это снижает точность управления горной машиной по силе резания. Цель изобретения - повышение точности управления горной машиной. Указанная цель достигается тем, что в устройстве для управления горной машиной, содержащем корпус, расположенный на исполнительном о1ргане, раму, один конец которой жестко связан с корпусом, шесть тензоэлементов, подключенных попарно по дифференциальной схеме к входам элемента сравнения, выход которого соединен с входом усилителя, подсоединенного к исполнительному механизму, рама выполнена Л-образной формы и на свободном ее конце закреплена силоприемная площадка в плоскости, перпендикулярной плоскости расположения рамы, причем на силоприемной площадке закреплен измерительный резец, а тензоэлементы установлены на раме в двух взаимно перпендикулярных плоскостях. Такое вьшолнение позволяет более точно измерять силы, действующие на резец, а следовательно, повысить точность управления-горной машиной. На фиг. 1 показано устройство дл управления горной машиной, общий вид; на фиг. 2 - то же, вид сверху; на фиг. 3 - разрез А-А на фиг. 2; на фиг. 4 - )i соединения тензоэлементов; на фиг. 5, 6 и 7 - схекы нагружения устройства; на фиг. 8 блок-схема управления машиной. Устрэйство для управления горной машиной содержит корпус 1, установленный на исполнительном органе 2. На свободном конце рамы 3 закреплена силоприемная площадка 4 в плоскости, перпендикулярной плоскости рамы 3. В силоприемной площадке 4 выполнено гнездо 5 для закрепления резца 6, который расположен в плоскости .рамы 3. На раме 3 закреплены тензоэлементы 7 - 12. База установки теизоэлементов 9,10 и 11,12 одинакова. Балки рамы 3 расположены в корпусе 1 и силоприемной площа ке 4 с зазором для обеспечения возможности перемещения балок вследств упругой деформации под действием си Тензоэлементы 7 и 8 расположены на раме 3 параллельно линии действия силы резания и предназначены для ее измерения. Тензоэлементы 9,10 и 11,12 расположены перпендикулярно линиям действия силы подачи У и бок вой силы X соответственно и предназ начены для их измерения. Схемы попа ного соединения тензоэлементов - дифференциальные(вычитающие). Тензо элементы 7-12 попарно своими выходами подключены к входам элемен та сравнения 13, выход которого соединен с входом усилителя 14(при необходимости усиления сигнала). Усилитель 14 через передаточное уст ройство 15 связан с исполнительным механизмом 16. В качеству восприни1584мающего элемента 17 в сисгеме управления применено настоящее устройство. Тензоэлементы 7-12 с целью защиты от внешней среды закрыты крышкой(не показана). Устройство работает следующим образом. Исполнительный орган 2, вращаясь, производит разрушение массива полезкого ископаемого. При работе по полезному ископаемому на резец 6 действуют три взаимно перпендикулярные силы: резания 2 , подачи У и боковая X. Так как резец 6 закреплен гнезде 5 на силоприемной площадке 4, которая соединена с П-образной рамой 3, а рама 3 жестко связана одним из своих концов с корпусом 1, эти силы вызывают упругие деформации балок рамы 3. Деформации балок воспринимаются тензоэлементами 7-12, которые вырабатывают электрические сигналы, пропорциональные этим упругим деформациям, а следовательно,и силам, вызвавшим эти деформации. Сила 2 измеряется при помощи тензоэлементов 7 и 8, сила У - при помощи тензоэлемеитов 9 и 10, а сила X при помощи тензоэлементов 11 и 12. Сигналы тензоэлементов 7-12 от .воспринимающего элемента 17 поступают на вход элемента сравнения 13, на другой вход которого подается сигнал РЗ на который настраивается система. Если измеренное значение силы Р на резце 6 не совпадает с настроечным Pj , то элемент сравнения вырабатывает сигнал рассогласования Р, который усиливается (при необходимостиуусилителем 14 и через передаточное устройство 15 подается на исполнительный механизм 16, который отрабатывает рассогласование так, чтодР 0. Кроме того, сигналы-, вырабатываеемые тензоэлементами 7-12, могут быть поданы на регистрирующую аппаратуру при проведении стендовых или шахтных исследований горных машин. В процессе работы резец 6 изнашивается вследствие трения об уголь или породу по передней, задней и боковым граням. Следовательно, точки . приложения сил Н,У и X постоянно, изменяются. Однако это не оказьшает влияния на показания тензоэлементов 7-12, так как они зависят только от значения сил г,У, X и базы установки тензоэлементов. Сила € измеряется J, при помощи тензоэлементов 7,8, Из фиг. 5 следует, что показания тенз элементов 7,8, соединенных по.дифференциальной схеме, определяются значением их базы установки 6 и значением силы 2 , (аьЬ)-г-а -.b Схема соединения тензоэлементов 9 и 10 также дифференциальная, что позволяет компенсировать сигнал ошибки от силы 2 на их показания : гл-га о Из фиг. 6 видно, что показания тензоэлементов 9 и 10 определяются только их базой установки С и значением силы У Y() Сигнал ошибки силы У на показан тензоэлементов 7,8 компенсируется вследствие дифференциальной схемы их соединения Выходной сигнал тензоэлементов II и 12 определяется базой их уста новки С и значением силы X, так 8 как схема соединения этих тензоэлементов также дифференциальная (фиг. 7) X()-Xot-Xc Влияние сил -г , У на X и наоборот компенсируется тем, что тензоэлементы 7-12 расположены на балках рамы 3 по осям их симметрии во взаимно перпендикулярных плоскостях. Точное дифференцированное измерение трех взаимно перпендикулярных сил, действующих на резец горной машины, позволяет повысить точность управления горной машиной, а именно, эффективно регулировать высоту исполнительного органа по мощности пласта, скорость подачи машины; скорость резания исполнительного органа; высоту комбайна относительно почвы пласта или конвейера и т.д. Эффективность управления горной машиной П9 сравнению с базовым объектом, в качестве которого взят прототип, повьшается на 15% з.а счет точного измерения сил резания, подачи и боковой. Это приводит к тому, что потери рабочего времени на операции, связанные с управлением горной машиной, сократятся на 9%, что обеспечит повьшение производительности горной машиной.
4
.z
X
иг.З
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для управления горной машиной | 1981 |
|
SU976074A1 |
| Исполнительный орган горной машины | 1983 |
|
SU1104259A1 |
| Исполнительный орган горной машины | 1982 |
|
SU1145130A1 |
| ГОРНОРЕЖУЩИЙ ИНСТРУМЕНТ | 2006 |
|
RU2307932C1 |
| Резец для горных машин | 1984 |
|
SU1244299A1 |
| Копер для испытания резцов горных машин на ударную прочность | 1978 |
|
SU868391A1 |
| Способ автоматического управления процессом обработки детали | 1982 |
|
SU1039693A1 |
| РЕЗЕЦ ДЛЯ ПРОХОДЧЕСКО-ОЧИСТНЫХ И ВЫЕМОЧНЫХ КОМБАЙНОВ (ВАРИАНТЫ) | 2013 |
|
RU2530138C1 |
| Устройство для измерения силРЕзАНия | 1978 |
|
SU838455A1 |
| Буровой резец, корпус бурового резца и твердосплавная пластина бурового резца | 2022 |
|
RU2809269C1 |


УСТРОЙСТВО ДЛЯ УПРАВЛЕНИЯ ГОРНОЙ МАШИНОЙ, содержащее корпус, расположенный на исполнительном органе, раму, один конец которой жестко связан с корпусом, шесть тензоэлементов, подключенных попарно по дифференциальной схеме к входам элемента сравнения, выход которого соединен с входом усилителя, подсоединенного к исполнительному механизму, Ьтлич ающе ее я тем, что, с целью повышения точности управления горной маишной, рама выполнена П-образной формы и на свободном-ее конце закреплена силоприемная площадка в плоскости, перпендикулярной плоскости расположения рамы, причём на силоприемной площадке закреплен измерительный резец, а тензозлементы установлены (Л на раме в двух взаимно перпендикулярных плоскостях.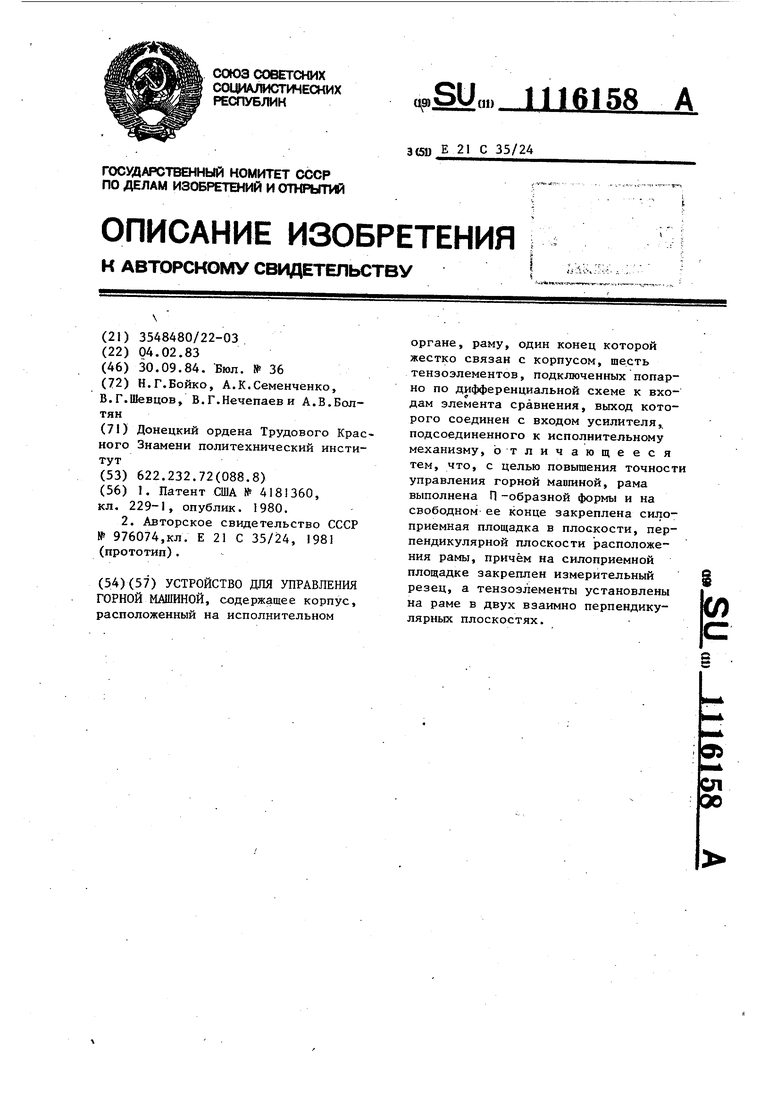
шптппкмпшттттж. a
/
/
A/1.5
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Патент США № 4181360, кл | |||
| Приспособление для подачи воды в паровой котел | 1920 |
|
SU229A1 |
| Способ получения фтористых солей | 1914 |
|
SU1980A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Устройство для управления горной машиной | 1981 |
|
SU976074A1 |
| Выбрасывающий ячеистый аппарат для рядовых сеялок | 1922 |
|
SU21A1 |
